
ホームページ >テクノロジー周辺機器 >AI >スマートビルディング: YOLOv7 に基づく建物外壁の欠陥検出
スマートビルディング: YOLOv7 に基づく建物外壁の欠陥検出

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBオリジナル
- 2024-06-11 12:01:31565ブラウズ
01 見通しの概要
現在の深層学習ベースの手法は、認識速度とモデルの複雑さの点でいくつかの課題に直面しています。建物の外壁欠陥検出の精度と速度を確保するために、BFD-YOLO と呼ばれる改良型 YOLOv7 手法を研究しました。まず、YOLOv7 の元の ELAN モジュールが軽量の MobileOne モジュールに置き換えられ、パラメータの数が減り、推論速度が向上しました。次に、特徴抽出機能を強化するために、座標アテンション モジュールがモデルに追加されます。次に、SCYLLA-IoU を使用して検出を高速化し、モデルの再現率を高めます。最後に、オープン データセットを拡張し、3 つの典型的な欠陥を含む建物ファサード損傷データセットを構築しました。 BFD-YOLO は、このデータセットに基づいて優れた精度と効率を実証します。 YOLOv7 と比較して、BFD-YOLO の精度と mAP@0.5 は、かなりの効率を維持しながら、それぞれ 2.2% と 2.9% 向上しています。実験によれば、この方法はリアルタイム性能を確保しながら高い検出精度を達成することができます。
02 現状とプロジェクトの動機
ファサードの欠陥の存在は、建設の運用段階での差し迫った問題であり、多くの場合、機械的および環境的要因が原因であると考えられています。典型的な欠陥には、コンクリートの剥離、装飾の剥離、部品の亀裂、大規模な変形、タイルの損傷、湿気による損傷などが含まれます。これらの欠陥は外観に影響を与え、建物の耐用年数を短縮する可能性があります。構造損傷検出の不可欠な部分として、建物の外壁の欠陥検出により、政府や管理者は建物の外壁の全体的な状態を正確に把握できるようになり、合理的な保守計画の策定に役立ちます。これは建物のメンテナンスコストを削減し、建物の耐用年数を延ばすために非常に重要です。構造損傷検出の不可欠な部分として、建物の外壁の欠陥検出により、政府や管理者は建物の外壁の全体的な状態を正確に把握できるようになり、合理的な保守計画の策定に役立ちます。これは建物のメンテナンスコストを削減し、建物の耐用年数を延ばすために非常に重要です。多くの国や地域では、定期的な標準化された目視検査に関する政策を策定しています。建物の外壁の欠陥の検出は、建物の外壁の全体的な状態を正確に把握し、合理的な修繕計画の策定に役立てるため、建物のメンテナンスにおいて重要な要素となっています。これは建物のメンテナンスコストを削減し、建物の耐用年数を延ばすための重要な方法です。多くの国や地域では、定期的な標準化された目視検査に関する政策を策定しています。建物の外壁の欠陥の検出は、建物の外壁の全体的な状態を正確に把握し、合理的な修繕計画の策定に役立てるため、建物のメンテナンスにおいて重要な要素となっています。これは建物のメンテナンスコストを削減し、建物の耐用年数を延ばすための重要な方法です。建物の外壁の欠陥の検出は、建物の外壁の全体的な状態を正確に把握し、合理的な修繕計画の策定に役立てるため、建物のメンテナンスにおいて重要な要素となっています。これは建物のメンテナンスコストを削減し、建物の耐用年数を延ばすための重要な方法です。
目視検査は、建物の外装の状態を評価する簡単で信頼できる方法です。従来の建物の外部検査では、通常、専門家が特殊なツールを持って検査現場に到着し、目視検査、ハンマーによる検査、その他の技術を使用して検査を行う必要があります。これらの方法は検査官の専門知識と経験に依存しているため、主観的で危険で非効率的です。建物の数と規模の増加により、手作業による目視検査では大規模検査の要件を満たすことができなくなりました。技術の進歩に伴い、ドローンやロボットプラットフォームによる外壁の損傷検出に、多くの新しい方法(レーザースキャン、3Dサーマルイメージング、SLAMなど)が使用されています。これらの新しい方法は、従来の技術よりも便利で安全ですが、時間とコストがかかります。したがって、これらの方法は、大規模な検査のニーズを満たす上で課題にも直面しています。したがって、検出効率を向上させ、計算コストを削減するには、より正確で効果的な表面欠陥検出方法を開発する必要があります。
03 新しいアイデアと実用的な詳細
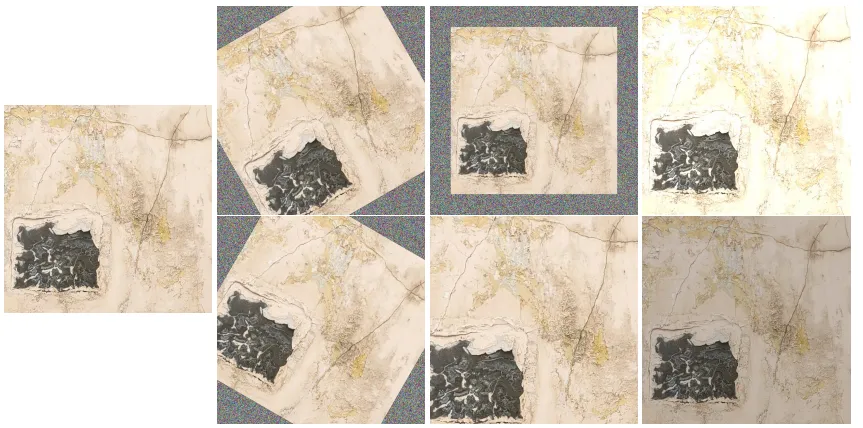
建物の外壁の欠陥には多くの種類があり、適用できる検出方法も異なります。一般的なタイプには、引き抜き欠陥、剥離、壁の空洞などがあります。クラックについては、検出にセマンティック セグメンテーションを使用する研究が増えています。壁の中空の場合は、タッピング法と赤外線熱画像法がより広く使用されています。研究に研究を重ね、対象の検出方法に適し、データセットの構築が容易な欠陥種を選定しました。データセット内の画像は主に、携帯電話、カメラ、ドローンで撮影された建物のファサード画像から取得されています。さらに、インターネットや公開データセットからの一部の画像も拡張に使用されます。すべての画像の幅は 1000 ピクセルから 3000 ピクセルの範囲です。高さの範囲は 2000 ピクセルから 5000 ピクセルです。データセットは、建物のファサードの 3 つの欠陥 (層間剥離、剥離、タイル損失) で構成されています。赤外線熱画像の背景画像を含む、合計 1907 枚の元の画像が収集されました。背景画像は、エラーの場所を減らすためにデータセットに追加される欠陥のない画像です。トレーニング セット、検証セット、テスト セットは 7:2:1 の比率に従って分割されます。以下の画像は、データセット内の欠陥の例を示しています。

左から右へ、剥離、剥離、タイルの損失です。
データ拡張
ニューラルネットワークのモデルトレーニングでは、多くの場合、大量のデータが必要になります。しかし、建物のファサード欠陥の画像を取得することは比較的難しく、収集されたデータにはクラスの不均衡の問題があります。この問題の影響を軽減するために、トレーニング データにデータ拡張技術を適用します。データ拡張は、生データに対してさまざまな変換を実行するための一般的な手法です。より多くのトレーニング データを生成するために、深層学習の分野で広く使用されています。データ拡張により、モデルがより多くのデータのバリエーションを学習し、特定のトレーニング サンプルに過度に依存するのを防ぐことができます。 監視データ強化技術には、幾何学的変換 (例: 反転、回転、スケーリング、トリミングなど) およびピクセル変換 (例: ノイズ、ぼかし、明るさ調整、彩度調整など) が含まれます。データ拡張の目標は、特定のトレーニング サンプルに過度に依存しないようにしながら、より多くのトレーニング サンプルを生成することです。これにより、モデルがデータの変化にうまく対応し、過剰適合を防ぐことができます。 データ拡張により、モデルがより多くのデータのバリエーションを学習し、特定のトレーニング サンプルに過度に依存するのを防ぐことができます。監視データ強化技術の場合、さまざまな変換 (たとえば、反転、回転、スケーリング、トリミングなど) およびピクセル変換 (たとえば、ノイズ、ぼかし、明るさ調整、彩度調整など) を適用できます。これらの手法は、モデルがデータの変化にうまく対応し、過剰適合を防ぐのに役立ちます。 データ拡張技術を最大限に活用するには、さまざまなデータ変換 (反転、回転、拡大縮小、トリミングなど) やピクセル変換 (ノイズ、ぼかし、明るさ調整、彩度調整など) を使用できます
新しい設計 フレームワーク
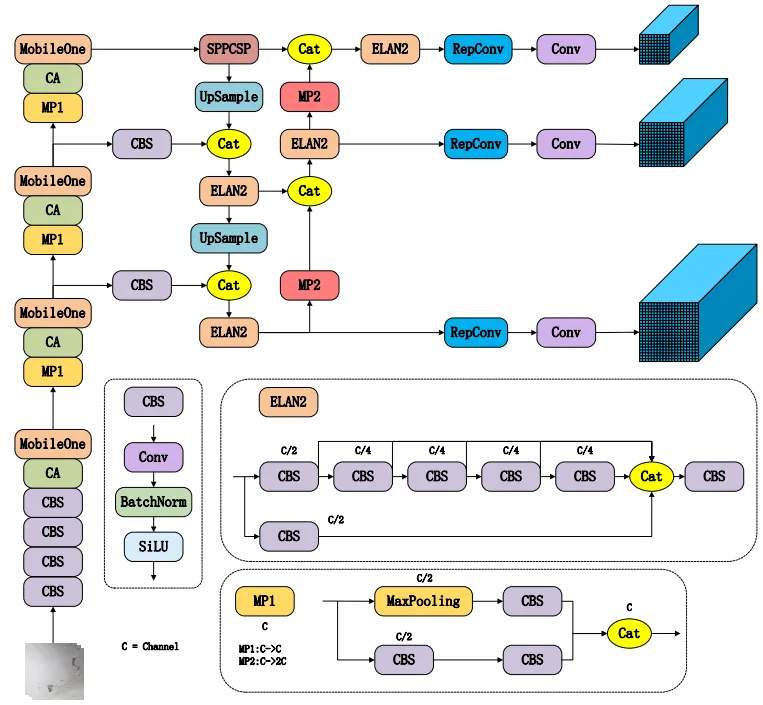
バックボーン ネットワークの機能は、機能を抽出することです。YOLOv7 の元のバックボーンは、正規化機能と SiLU アクティベーション機能で構成される複数のモジュールで構成されています。改良されたバックボーン ネットワークでは、ELAN モジュールを MobileOne モジュールに置き換えて速度を向上させ、各 MobileOne モジュールの背後に調整されたアテンション モジュールを追加することで、入力画像の顕著な特徴に焦点を当て、外部情報を抑制することで、効果的に画像処理速度を向上させることができます。ネットワークの先頭は、1 つの SPPPCC、複数の ELAN2、CatConv、および 3 つの RepVGG ブロックで構成される PaFPN 構造です。勾配パス設計戦略は、ネットワーク パラメーターを効果的に利用するネットワーク アーキテクチャを設計するために、勾配のソースと構成を分析することに重点を置いています。ELAN と ELAN2 の違いは、トレーニングのパフォーマンスを向上させるために RepVGG ブロックに適用される構造的な再パラメーター化手法です。 3 つの特徴マップを出力した後、ヘッドは 3 つの RepConv モジュールを通じて 3 つの予測結果を生成します。 プラットフォームのハードウェアとソフトウェアの構成が確立されました。以下の表に示します。
Windows 10 3090
RAM
32GB
言語
Python 3.7
フレームワーク
Pytorch 1.11 .0
以上がスマートビルディング: YOLOv7 に基づく建物外壁の欠陥検出の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。