
Maison >Périphériques technologiques >IA >La multiplication matricielle universelle de CUDA : de l'entrée à la maîtrise !
La multiplication matricielle universelle de CUDA : de l'entrée à la maîtrise !

- 王林avant
- 2024-03-25 12:30:271349parcourir
La multiplication matricielle générale (GEMM) est un élément essentiel de nombreuses applications et algorithmes, et constitue également l'un des indicateurs importants pour évaluer les performances du matériel informatique. Une recherche approfondie et l'optimisation de la mise en œuvre de GEMM peuvent nous aider à mieux comprendre le calcul haute performance et la relation entre les systèmes logiciels et matériels. En informatique, une optimisation efficace de GEMM peut augmenter la vitesse de calcul et économiser des ressources, ce qui est crucial pour améliorer les performances globales d’un système informatique. Une compréhension approfondie du principe de fonctionnement et de la méthode d'optimisation de GEMM nous aidera à mieux utiliser le potentiel du matériel informatique moderne et à fournir des solutions plus efficaces pour diverses tâches informatiques complexes. En optimisant et en améliorant les performances de GEMM, nous pouvons ajouter
1. Caractéristiques de base de GEMM
1.1 Processus et complexité de calcul de GEMM
GEMM est défini comme :


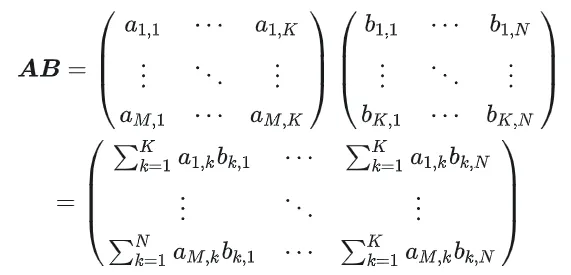


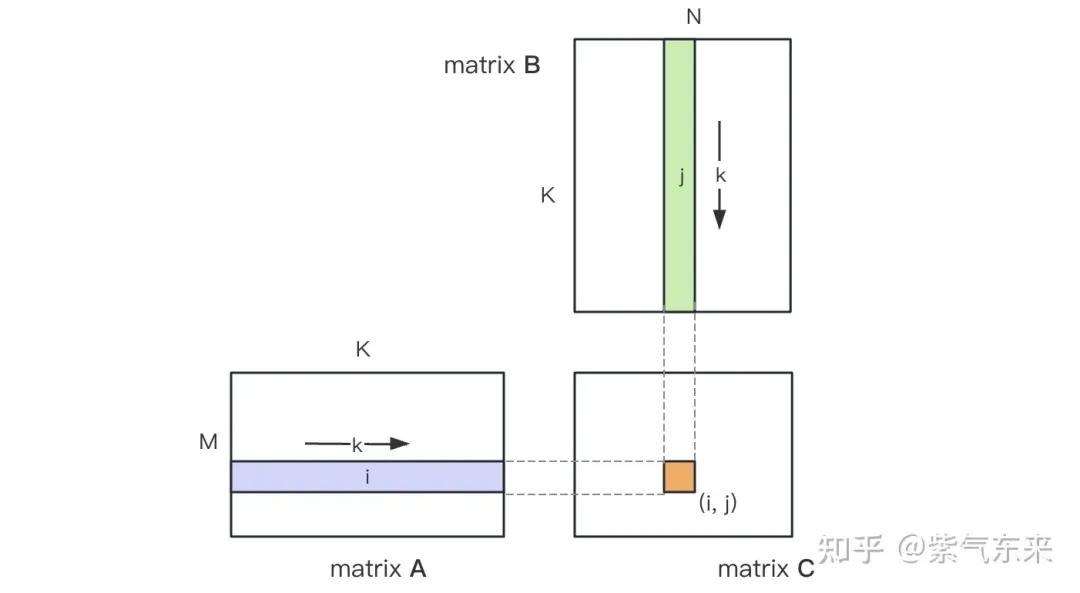
Schéma informatique de la multiplication matricielle
1.2 Implémentation simple et analyse du processus

Ce qui suit est le code implémenté sur le CPU selon la définition originale, qui sera utilisé comme contrôle pour la précision
#define OFFSET(row, col, ld) ((row) * (ld) + (col))void cpuSgemm(float *a, float *b, float *c, const int M, const int N, const int K) {for (int m = 0; m
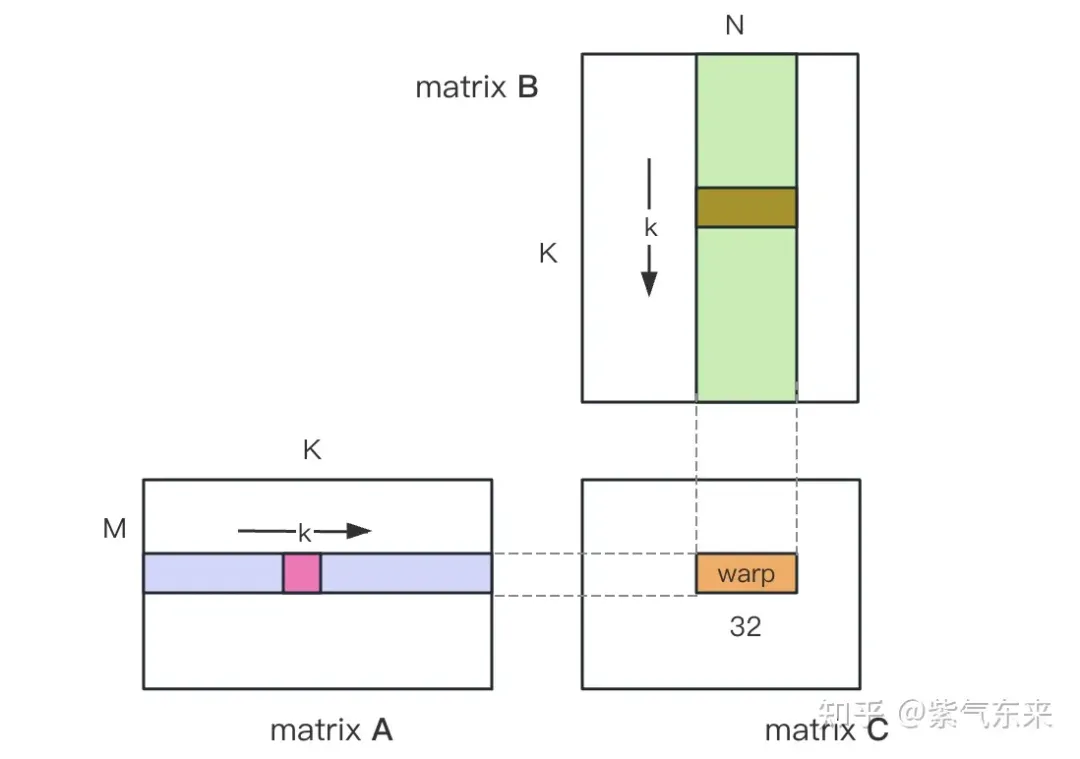
Ce qui suit utilise CUDA pour implémenter Kernal, la multiplication matricielle la plus simple. Un total de M * N threads sont utilisés pour terminer l'intégralité de la multiplication matricielle. Chaque thread est responsable du calcul d'un élément de la matrice C et doit effectuer K fois de multiplication et d'accumulation. Les matrices A, B et C sont toutes stockées dans la mémoire globale (déterminée par le modificateur __global__ Voir sgemm_naive.cu pour le code complet).
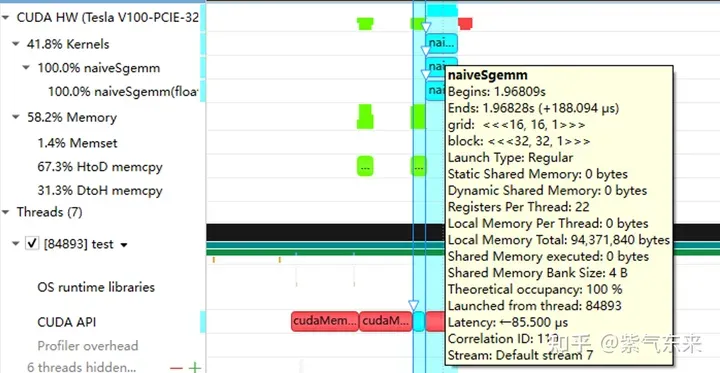
__global__ void naiveSgemm(float * __restrict__ a, float * __restrict__ b, float * __restrict__ c,const int M, const int N, const int K) {int n = blockIdx.x * blockDim.x + threadIdx.x;int m = blockIdx.y * blockDim.y + threadIdx.y;if (m La compilation est terminée et les résultats de l'exécution sur Tesla V100-PCIE-32GB sont les suivants. Selon le livre blanc du V100, la puissance de calcul maximale du FP32 est de 15,7 TFLOPS, donc l'utilisation de la puissance de calcul de celui-ci. la méthode n’est que de 11,5 %.
M N K =128128 1024, Time = 0.00010083 0.00010260 0.00010874 s, AVG Performance = 304.5951 GflopsM N K =192192 1024, Time = 0.00010173 0.00010198 0.00010253 s, AVG Performance = 689.4680 GflopsM N K =256256 1024, Time = 0.00010266 0.00010318 0.00010384 s, AVG Performance =1211.4281 GflopsM N K =384384 1024, Time = 0.00019475 0.00019535 0.00019594 s, AVG Performance =1439.7206 GflopsM N K =512512 1024, Time = 0.00037693 0.00037794 0.00037850 s, AVG Performance =1322.9753 GflopsM N K =768768 1024, Time = 0.00075238 0.00075558 0.00075776 s, AVG Performance =1488.9271 GflopsM N K = 1024 1024 1024, Time = 0.00121562 0.00121669 0.00121789 s, AVG Performance =1643.8068 GflopsM N K = 1536 1536 1024, Time = 0.00273072 0.00275611 0.00280208 s, AVG Performance =1632.7386 GflopsM N K = 2048 2048 1024, Time = 0.00487622 0.00488028 0.00488614 s, AVG Performance =1639.2518 GflopsM N K = 3072 3072 1024, Time = 0.01001603 0.01071136 0.01099990 s, AVG Performance =1680.4589 GflopsM N K = 4096 4096 1024, Time = 0.01771046 0.01792170 0.01803462 s, AVG Performance =1785.5450 GflopsM N K = 6144 6144 1024, Time = 0.03988969 0.03993405 0.04000595 s, AVG Performance =1802.9724 GflopsM N K = 8192 8192 1024, Time = 0.07119219 0.07139694 0.07160816 s, AVG Performance =1792.7940 GflopsM N K =1228812288 1024, Time = 0.15978026 0.15993242 0.16043369 s, AVG Performance =1800.7606 GflopsM N K =1638416384 1024, Time = 0.28559187 0.28567238 0.28573316 s, AVG Performance =1792.2629 Gflops
Ce qui suit prend M=512, K=512, N=512 comme exemple pour analyser en détail le flux de travail du processus de calcul ci-dessus :
- Dans la mémoire globale, allouez de l'espace de stockage pour les matrices A, B et C respectivement.
- En raison de la matrice Le calcul de chaque élément en C est indépendant l'un de l'autre, donc dans le mappage de parallélisme, chaque thread correspond au calcul de 1 élément dans la matrice C.
- GridSize et blockSize dans la configuration d'exécution ont x (sens des colonnes), y (sens des lignes) deux dimensions, parmi lesquelles
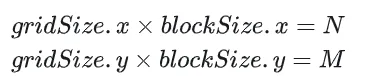


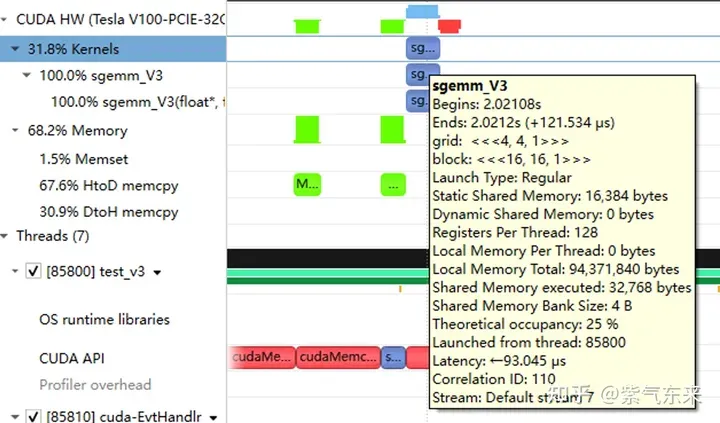
nsys enregistre la version naïve du profilage
2. Exploration de l'optimisation GEMM
Le précédent L'article est uniquement fonctionnel. GEMM a été implémenté, mais les performances sont loin d'être attendues. Cette section étudiera principalement l'optimisation des performances de GEMM.
2.1 Partitionnement matriciel à l'aide de la mémoire partagée
Le calcul ci-dessus nécessite deux charges de mémoire globale pour effectuer une opération de multiplication et d'accumulation. Le taux d'accès à la mémoire de calcul est extrêmement faible et il n'y a pas de réutilisation efficace des données. Par conséquent, la mémoire partagée peut être utilisée pour réduire les lectures répétées de la mémoire.
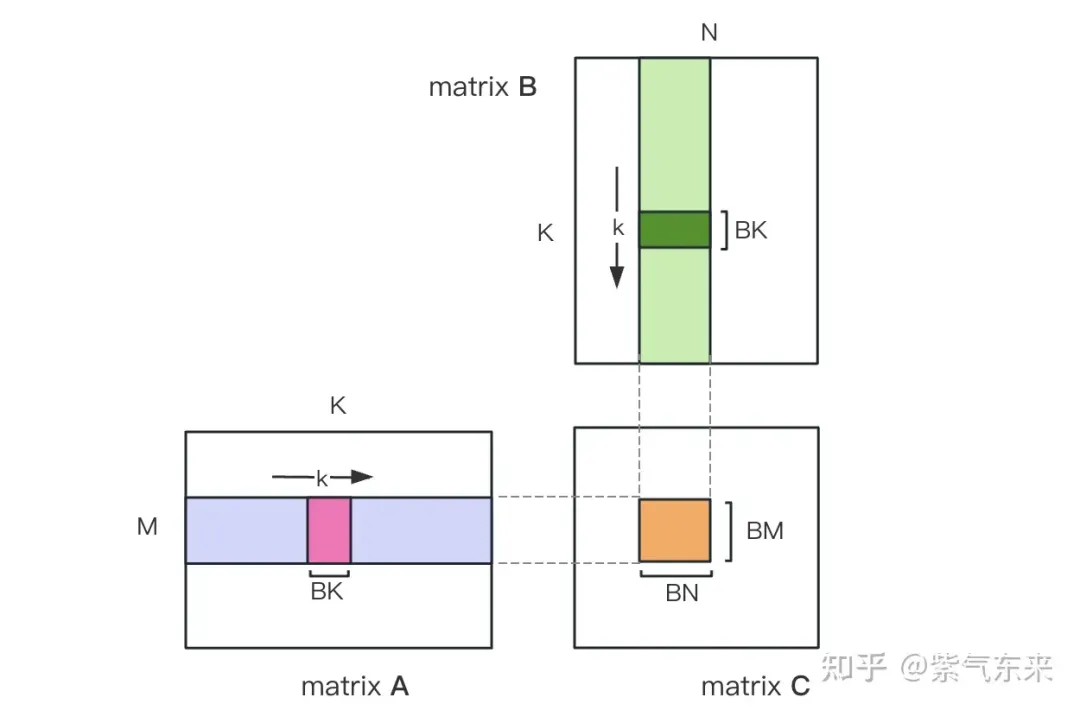
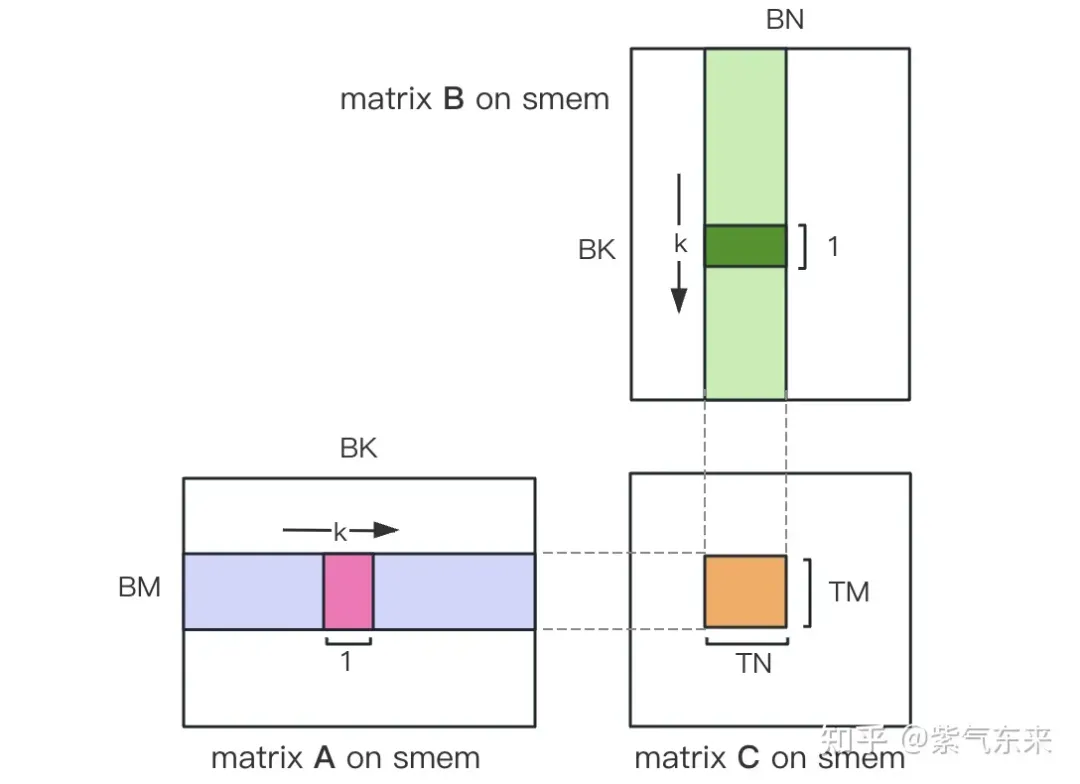
Divisez d'abord la matrice C en blocs égaux de taille BMxBN. Chaque bloc est calculé par un bloc, où chaque thread est responsable du calcul des éléments TMxTN dans la matrice C. Ensuite, toutes les données nécessaires au calcul sont lues depuis smem, ce qui élimine une partie de la lecture répétée en mémoire des matrices A et B. Étant donné que la mémoire partagée a une capacité limitée, les blocs de taille BK peuvent être lus dans des dimensions K à chaque fois. Une telle boucle nécessite un total de fois K/BK pour terminer l'opération de multiplication matricielle complète, et le résultat du bloc peut être obtenu. Le processus est illustré dans la figure ci-dessous :
Après optimisation à l'aide de la mémoire partagée, pour chaque bloc, nous pouvons obtenir :
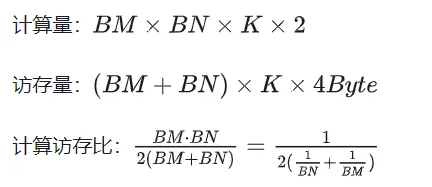
On peut voir à partir de la formule ci-dessus que plus le BM et le BN sont grands, plus le taux d'accès à la mémoire de calcul est plus élevé et les performances seront meilleures. Cependant, en raison de la limitation de la capacité de la mémoire partagée (le V100 1 SM ne fait que 96 Ko), un bloc doit occuper BK * (BM + BN) * 4 octets.
Les valeursde TM et TN sont également limitées par deux aspects. D'une part, il existe des restrictions sur le nombre de threads BM / TM * BN / TN dans un bloc. dépasser 1024, et ne peut pas être trop élevé pour éviter qu'il n'affecte le parallélisme entre les blocs ; par contre, il y a une limite sur le nombre de registres. matrice C, plus quelques autres registres. Le nombre de tous les registres ne peut pas dépasser 256, et ne peut pas être trop élevé pour éviter d'affecter le nombre de threads parallèles dans SM en même temps.
Enfin, sélectionnez BM = BN = 128, BK = 8, TM = TN = 8, le taux d'accès mémoire calculé est alors de 32. Selon la puissance de calcul théorique du V100 15,7TFLOPS, nous pouvons obtenir 15,7TFLOPS/32 = 490 Go/s. Selon la bande passante HBM mesurée est de 763 Go/s, on peut voir que la bande passante ne limitera plus les performances de calcul à ce niveau. temps.
Sur la base de l'analyse ci-dessus, le processus d'implémentation de la fonction noyau est le suivant. Pour le code complet, voir sgemm_v1.cu. Les principales étapes comprennent :

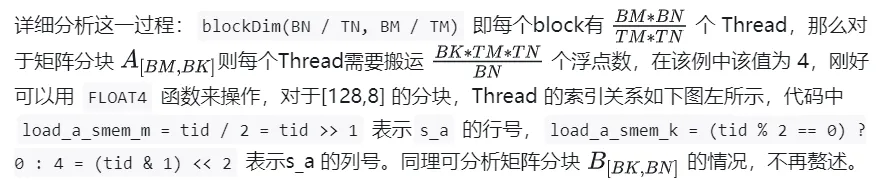
Relation d'index de thread B du partitionnement matriciel.
确定好单个block的执行过程,接下来需要确定多block处理的不同分块在Global Memory中的对应关系,仍然以A为例进行说明。由于分块沿着行的方向移动,那么首先需要确定行号,根据 Grid 的二维全局线性索引关系,by * BM 表示该分块的起始行号,同时我们已知load_a_smem_m 为分块内部的行号,因此全局的行号为load_a_gmem_m = by * BM + load_a_smem_m 。由于分块沿着行的方向移动,因此列是变化的,需要在循环内部计算,同样也是先计算起始列号bk * BK 加速分块内部列号load_a_smem_k 得到 load_a_gmem_k = bk * BK + load_a_smem_k ,由此我们便可以确定了分块在原始数据中的位置OFFSET(load_a_gmem_m, load_a_gmem_k, K) 。同理可分析矩阵分块 的情况,不再赘述。

计算完后,还需要将其存入 Global Memory 中,这就需要计算其在 Global Memory 中的对应关系。由于存在更小的分块,则行和列均由3部分构成:全局行号store_c_gmem_m 等于大分块的起始行号by * BM+小分块的起始行号ty * TM+小分块内部的相对行号 i 。列同理。
__global__ void sgemm_V1(float * __restrict__ a, float * __restrict__ b, float * __restrict__ c,const int M, const int N, const int K) {const int BM = 128;const int BN = 128;const int BK = 8;const int TM = 8;const int TN = 8;const int bx = blockIdx.x;const int by = blockIdx.y;const int tx = threadIdx.x;const int ty = threadIdx.y;const int tid = ty * blockDim.x + tx;__shared__ float s_a[BM][BK];__shared__ float s_b[BK][BN];float r_c[TM][TN] = {0.0};int load_a_smem_m = tid >> 1;// tid/2, row of s_aint load_a_smem_k = (tid & 1) > 5; // tid/32, row of s_bint load_b_smem_n = (tid & 31) 计算结果如下,性能达到了理论峰值性能的51.7%:
M N K =128128 1024, Time = 0.00031578 0.00031727 0.00032288 s, AVG Performance =98.4974 GflopsM N K =192192 1024, Time = 0.00031638 0.00031720 0.00031754 s, AVG Performance = 221.6661 GflopsM N K =256256 1024, Time = 0.00031488 0.00031532 0.00031606 s, AVG Performance = 396.4287 GflopsM N K =384384 1024, Time = 0.00031686 0.00031814 0.00032080 s, AVG Performance = 884.0425 GflopsM N K =512512 1024, Time = 0.00031814 0.00032007 0.00032493 s, AVG Performance =1562.1563 GflopsM N K =768768 1024, Time = 0.00032397 0.00034419 0.00034848 s, AVG Performance =3268.5245 GflopsM N K = 1024 1024 1024, Time = 0.00034570 0.00034792 0.00035331 s, AVG Performance =5748.3952 GflopsM N K = 1536 1536 1024, Time = 0.00068797 0.00068983 0.00069094 s, AVG Performance =6523.3424 GflopsM N K = 2048 2048 1024, Time = 0.00136173 0.00136552 0.00136899 s, AVG Performance =5858.5604 GflopsM N K = 3072 3072 1024, Time = 0.00271910 0.00273115 0.00274006 s, AVG Performance =6590.6331 GflopsM N K = 4096 4096 1024, Time = 0.00443805 0.00445964 0.00446883 s, AVG Performance =7175.4698 GflopsM N K = 6144 6144 1024, Time = 0.00917891 0.00950608 0.00996963 s, AVG Performance =7574.0999 GflopsM N K = 8192 8192 1024, Time = 0.01628838 0.01645271 0.01660790 s, AVG Performance =7779.8733 GflopsM N K =1228812288 1024, Time = 0.03592557 0.03597434 0.03614323 s, AVG Performance =8005.7066 GflopsM N K =1638416384 1024, Time = 0.06304122 0.06306373 0.06309302 s, AVG Performance =8118.7715 Gflops
下面仍以M=512,K=512,N=512为例,分析一下结果。首先通过 profiling 可以看到 Shared Memory 占用为 8192 bytes,这与理论上(128+128)X8X4完全一致。
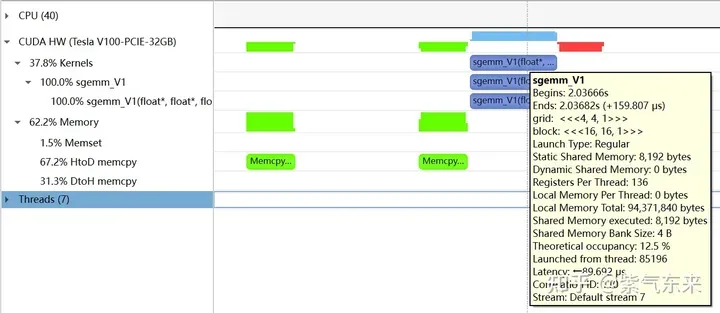 nsys 记录 的 V1 版本的 profiling
nsys 记录 的 V1 版本的 profiling
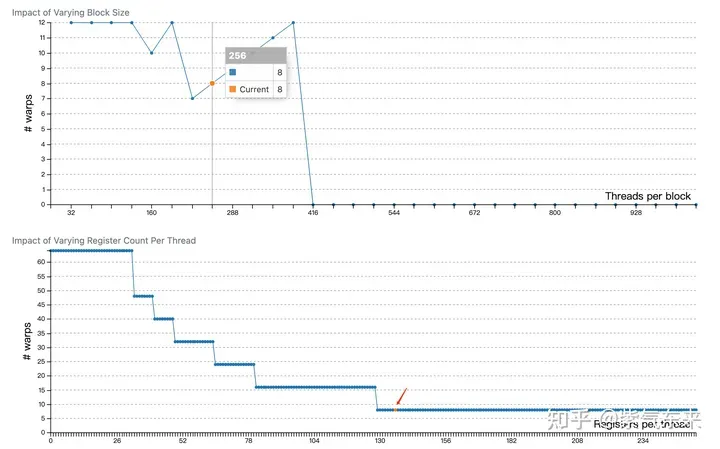
profiling 显示 Occupancy 为 12.5%,可以通过 cuda-calculator 加以印证,该例中 threads per block = 256, Registers per thread = 136, 由此可以计算得到每个SM中活跃的 warp 为8,而对于V100,每个SM中的 warp 总数为64,因此 Occupancy 为 8/64 = 12.5%。
2.2 解决 Bank Conflict 问题
上节通过利用 Shared Memory 大幅提高了访存效率,进而提高了性能,本节将进一步优化 Shared Memory 的使用。
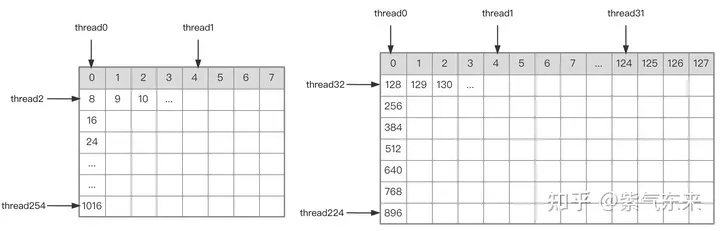
Shared Memory一共划分为32个Bank,每个Bank的宽度为4 Bytes,如果需要访问同一个Bank的多个数据,就会发生Bank Conflict。例如一个Warp的32个线程,如果访问的地址分别为0、4、8、...、124,就不会发生Bank Conflict,只占用Shared Memory一拍的时间;如果访问的地址为0、8、16、...、248,这样一来地址0和地址128对应的数据位于同一Bank、地址4和地址132对应的数据位于同一Bank,以此类推,那么就需要占用Shared Memory两拍的时间才能读出。

有 Bank Conflict VS 无 Bank Conflict
再看 V1 版本计算部分的三层循环,每次从Shared memory中取矩阵A的长度为TM的向量和矩阵B的长度为TN的向量,这两个向量做外积并累加到部分和中,一次外积共TM * TN次乘累加,一共需要循环BK次取数和外积。
接下来分析从Shared Memory load的过程中存在的Bank Conflict:
i) 取矩阵A需要取一个列向量,而矩阵A在Shared Memory中是按行存储的;
ii) 在TM = TN = 8的情况下,无论矩阵A还是矩阵B,从Shared Memory中取数时需要取连续的8个数,即便用LDS.128指令一条指令取四个数,也需要两条指令,由于一个线程的两条load指令的地址是连续的,那么同一个Warp不同线程的同一条load指令的访存地址就是被间隔开的,便存在着 Bank Conflict。
为了解决上述的两点Shared Memory的Bank Conflict,采用了一下两点优化:
i) 为矩阵A分配Shared Memory时形状分配为[BK][BM],即让矩阵A在Shared Memory中按列存储
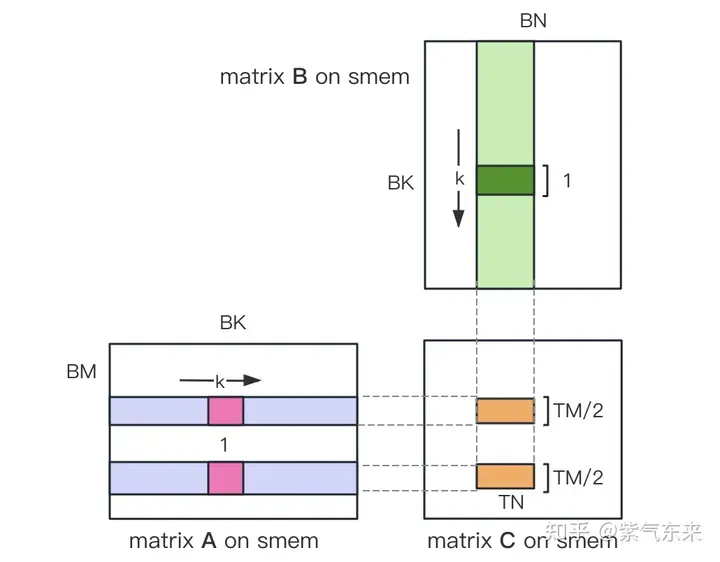
ii) 将原本每个线程负责计算的TM * TN的矩阵C,划分为下图中这样的两块TM/2 * TN的矩阵C,由于TM/2=4,一条指令即可完成A的一块的load操作,两个load可同时进行。
kernel 函数的核心部分实现如下,完整代码见 sgemm_v2.cu 。
__shared__ float s_a[BK][BM];__shared__ float s_b[BK][BN];float r_load_a[4];float r_load_b[4];float r_comp_a[TM];float r_comp_b[TN];float r_c[TM][TN] = {0.0};int load_a_smem_m = tid >> 1;int load_a_smem_k = (tid & 1) > 5;int load_b_smem_n = (tid & 31) 结果如下,相对未解决 Bank Conflict 版(V1) 性能提高了 14.4%,达到了理论峰值的74.3%。
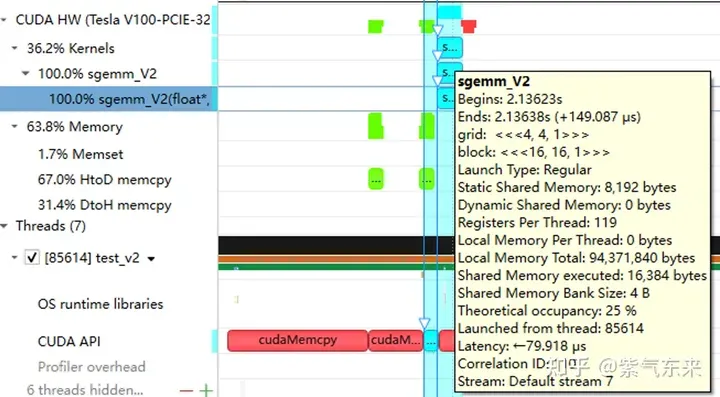
M N K =128128 1024, Time = 0.00029699 0.00029918 0.00030989 s, AVG Performance = 104.4530 GflopsM N K =192192 1024, Time = 0.00029776 0.00029828 0.00029882 s, AVG Performance = 235.7252 GflopsM N K =256256 1024, Time = 0.00029485 0.00029530 0.00029619 s, AVG Performance = 423.2949 GflopsM N K =384384 1024, Time = 0.00029734 0.00029848 0.00030090 s, AVG Performance = 942.2843 GflopsM N K =512512 1024, Time = 0.00029853 0.00029945 0.00030070 s, AVG Performance =1669.7479 GflopsM N K =768768 1024, Time = 0.00030458 0.00032467 0.00032790 s, AVG Performance =3465.1038 GflopsM N K = 1024 1024 1024, Time = 0.00032406 0.00032494 0.00032621 s, AVG Performance =6155.0281 GflopsM N K = 1536 1536 1024, Time = 0.00047990 0.00048224 0.00048461 s, AVG Performance =9331.3912 GflopsM N K = 2048 2048 1024, Time = 0.00094426 0.00094636 0.00094992 s, AVG Performance =8453.4569 GflopsM N K = 3072 3072 1024, Time = 0.00187866 0.00188096 0.00188538 s, AVG Performance =9569.5816 GflopsM N K = 4096 4096 1024, Time = 0.00312589 0.00319050 0.00328147 s, AVG Performance = 10029.7885 GflopsM N K = 6144 6144 1024, Time = 0.00641280 0.00658940 0.00703498 s, AVG Performance = 10926.6372 GflopsM N K = 8192 8192 1024, Time = 0.01101130 0.01116194 0.01122950 s, AVG Performance = 11467.5446 GflopsM N K =1228812288 1024, Time = 0.02464854 0.02466705 0.02469344 s, AVG Performance = 11675.4946 GflopsM N K =1638416384 1024, Time = 0.04385955 0.04387468 0.04388355 s, AVG Performance = 11669.5995 Gflops
分析一下 profiling 可以看到 Static Shared Memory 仍然是使用了8192 Bytes,奇怪的的是,Shared Memory executed 却翻倍变成了 16384 Bytes(知友如果知道原因可以告诉我一下)。
2.3 流水并行化:Double Buffering
Double Buffering,即双缓冲,即通过增加buffer的方式,使得 访存-计算 的串行模式流水线化,以减少等待时间,提高计算效率,其原理如下图所示:
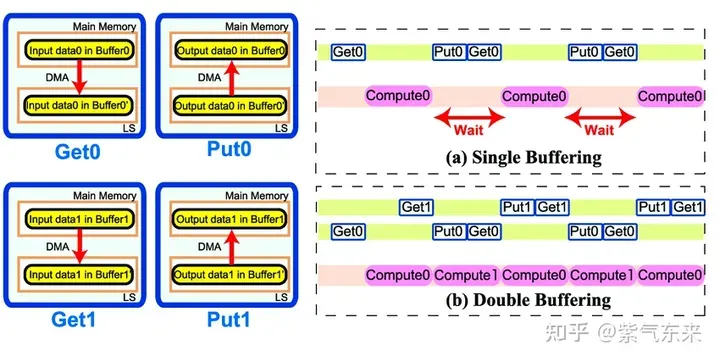
Single Buffering VS Double Buffering
具体到 GEMM 任务中来,就是需要两倍的Shared Memory,之前只需要BK * (BM + BN) * 4 Bytes的Shared Memory,采用Double Buffering之后需要2BK * (BM + BN) * 4 Bytes的Shared Memory,然后使其 pipeline 流动起来。
代码核心部分如下所示,完整代码参见 sgemm_v3.cu 。有以下几点需要注意:
1)主循环从bk = 1 开始,第一次数据加载在主循环之前,最后一次计算在主循环之后,这是pipeline 的特点决定的;
2)由于计算和下一次访存使用的Shared Memory不同,因此主循环中每次循环只需要一次__syncthreads()即可
3)由于GPU不能向CPU那样支持乱序执行,主循环中需要先将下一次循环计算需要的Gloabal Memory中的数据load 到寄存器,然后进行本次计算,之后再将load到寄存器中的数据写到Shared Memory,这样在LDG指令向Global Memory做load时,不会影响后续FFMA及其它运算指令的 launch 执行,也就达到了Double Buffering的目的。
__shared__ float s_a[2][BK][BM];__shared__ float s_b[2][BK][BN];float r_load_a[4];float r_load_b[4];float r_comp_a[TM];float r_comp_b[TN];float r_c[TM][TN] = {0.0};int load_a_smem_m = tid >> 1;int load_a_smem_k = (tid & 1) > 5;int load_b_smem_n = (tid & 31) 性能如下所示,达到了理论峰值的 80.6%。
M N K =128128 1024, Time = 0.00024000 0.00024240 0.00025792 s, AVG Performance = 128.9191 GflopsM N K =192192 1024, Time = 0.00024000 0.00024048 0.00024125 s, AVG Performance = 292.3840 GflopsM N K =256256 1024, Time = 0.00024029 0.00024114 0.00024272 s, AVG Performance = 518.3728 GflopsM N K =384384 1024, Time = 0.00024070 0.00024145 0.00024198 s, AVG Performance =1164.8394 GflopsM N K =512512 1024, Time = 0.00024173 0.00024237 0.00024477 s, AVG Performance =2062.9786 GflopsM N K =768768 1024, Time = 0.00024291 0.00024540 0.00026010 s, AVG Performance =4584.3820 GflopsM N K = 1024 1024 1024, Time = 0.00024534 0.00024631 0.00024941 s, AVG Performance =8119.7302 GflopsM N K = 1536 1536 1024, Time = 0.00045712 0.00045780 0.00045872 s, AVG Performance =9829.5167 GflopsM N K = 2048 2048 1024, Time = 0.00089632 0.00089970 0.00090656 s, AVG Performance =8891.8924 GflopsM N K = 3072 3072 1024, Time = 0.00177891 0.00178289 0.00178592 s, AVG Performance = 10095.9883 GflopsM N K = 4096 4096 1024, Time = 0.00309763 0.00310057 0.00310451 s, AVG Performance = 10320.6843 GflopsM N K = 6144 6144 1024, Time = 0.00604826 0.00619887 0.00663078 s, AVG Performance = 11615.0253 GflopsM N K = 8192 8192 1024, Time = 0.01031738 0.01045051 0.01048861 s, AVG Performance = 12248.2036 GflopsM N K =1228812288 1024, Time = 0.02283978 0.02285837 0.02298272 s, AVG Performance = 12599.3212 GflopsM N K =1638416384 1024, Time = 0.04043287 0.04044823 0.04046151 s, AVG Performance = 12658.1556 Gflops
从 profiling 可以看到双倍的 Shared Memory 的占用
三、cuBLAS 实现方式探究
本节我们将认识CUDA的标准库——cuBLAS, 即NVIDIA版本的基本线性代数子程序 (Basic Linear Algebra Subprograms, BLAS) 规范实现代码。它支持 Level 1 (向量与向量运算) ,Level 2 (向量与矩阵运算) ,Level 3 (矩阵与矩阵运算) 级别的标准矩阵运算。
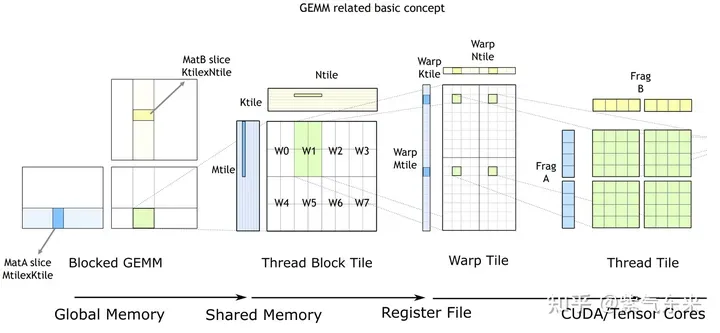
cuBLAS/CUTLASS GEMM的基本过程
如上图所示,计算过程分解成线程块片(thread block tile)、线程束片(warp tile)和线程片(thread tile)的层次结构并将AMP的策略应用于此层次结构来高效率的完成基于GPU的拆分成tile的GEMM。这个层次结构紧密地反映了NVIDIA CUDA编程模型。可以看到从global memory到shared memory的数据移动(矩阵到thread block tile);从shared memory到寄存器的数据移动(thread block tile到warp tile);从寄存器到CUDA core的计算(warp tile到thread tile)。
cuBLAS 实现了单精度矩阵乘的函数cublasSgemm,其主要参数如下:
cublasStatus_t cublasSgemm( cublasHandle_t handle, // 调用 cuBLAS 库时的句柄 cublasOperation_t transa, // A 矩阵是否需要转置 cublasOperation_t transb, // B 矩阵是否需要转置 int m, // A 的行数 int n, // B 的列数 int k, // A 的列数 const float *alpha, // 系数 α, host or device pointer const float *A, // 矩阵 A 的指针,device pointer int lda, // 矩阵 A 的主维,if A 转置, lda = max(1, k), else max(1, m) const float *B, // 矩阵 B 的指针, device pointer int ldb, // 矩阵 B 的主维,if B 转置, ldb = max(1, n), else max(1, k) const float *beta, // 系数 β, host or device pointer float *C, // 矩阵 C 的指针,device pointer int ldc // 矩阵 C 的主维,ldc >= max(1, m) );
调用方式如下:
cublasHandle_t cublas_handle;cublasCreate(&cublas_handle);float cublas_alpha = 1.0;float cublas_beta = 0;cublasSgemm(cublas_handle, CUBLAS_OP_N, CUBLAS_OP_N, N, M, K, &cublas_alpha, d_b, N, d_a, K, &cublas_beta, d_c, N);
性能如下所示,达到了理论峰值的 82.4%。
M N K =128128 1024, Time = 0.00002704 0.00003634 0.00010822 s, AVG Performance = 860.0286 GflopsM N K =192192 1024, Time = 0.00003155 0.00003773 0.00007267 s, AVG Performance =1863.6689 GflopsM N K =256256 1024, Time = 0.00003917 0.00004524 0.00007747 s, AVG Performance =2762.9438 GflopsM N K =384384 1024, Time = 0.00005318 0.00005978 0.00009120 s, AVG Performance =4705.0655 GflopsM N K =512512 1024, Time = 0.00008326 0.00010280 0.00013840 s, AVG Performance =4863.9646 GflopsM N K =768768 1024, Time = 0.00014278 0.00014867 0.00018816 s, AVG Performance =7567.1560 GflopsM N K = 1024 1024 1024, Time = 0.00023485 0.00024460 0.00028150 s, AVG Performance =8176.5614 GflopsM N K = 1536 1536 1024, Time = 0.00046474 0.00047607 0.00051181 s, AVG Performance =9452.3201 GflopsM N K = 2048 2048 1024, Time = 0.00077930 0.00087862 0.00092307 s, AVG Performance =9105.2126 GflopsM N K = 3072 3072 1024, Time = 0.00167904 0.00168434 0.00171114 s, AVG Performance = 10686.6837 GflopsM N K = 4096 4096 1024, Time = 0.00289619 0.00291068 0.00295904 s, AVG Performance = 10994.0128 GflopsM N K = 6144 6144 1024, Time = 0.00591766 0.00594586 0.00596915 s, AVG Performance = 12109.2611 GflopsM N K = 8192 8192 1024, Time = 0.01002384 0.01017465 0.01028435 s, AVG Performance = 12580.2896 GflopsM N K =1228812288 1024, Time = 0.02231159 0.02233805 0.02245619 s, AVG Performance = 12892.7969 GflopsM N K =1638416384 1024, Time = 0.03954650 0.03959291 0.03967242 s, AVG Performance = 12931.6086 Gflops
由此可以对比以上各种方法的性能情况,可见手动实现的性能已接近于官方的性能,如下:
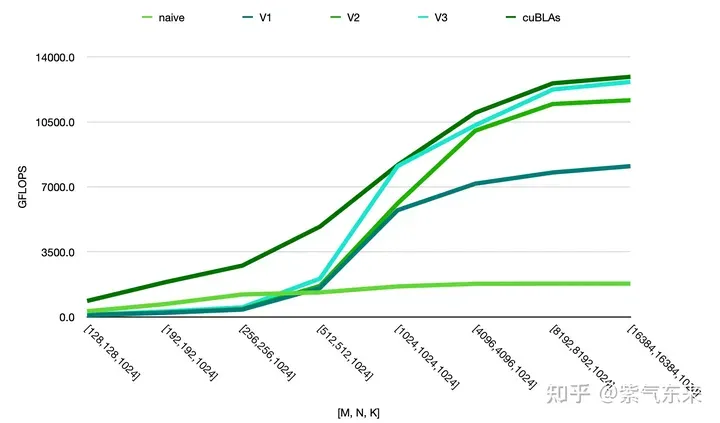
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!