
Maison >Périphériques technologiques >IA >Comment les caméras et le lidar sont-ils calibrés ? Un aperçu de tous les outils d'étalonnage courants de l'industrie
Comment les caméras et le lidar sont-ils calibrés ? Un aperçu de tous les outils d'étalonnage courants de l'industrie

- PHPzavant
- 2024-03-22 14:01:39755parcourir
L'étalonnage des caméras et du lidar est un travail de base crucial dans de nombreuses tâches. La précision de l'étalonnage affecte directement la limite supérieure de l'effet de la fusion ultérieure de la solution. Étant donné que de nombreuses entreprises de conduite autonome et de robotique investissent beaucoup de main-d'œuvre et de ressources matérielles pour améliorer continuellement la précision de l'étalonnage, nous allons vous présenter aujourd'hui quelques boîtes à outils d'étalonnage Caméra-Lidar courantes, et nous vous recommandons de les collecter !
1.Libcbdetect
Détection de damiers multiples en un seul coup : https://www.cvlibs.net/software/libcbdetect/
L'algorithme écrit à l'aide de MATLAB peut automatiquement extraire les points d'angle et les rendre précis au sous-pixel level et combinez ces points d’angle dans un motif en damier rectangulaire. Cet algorithme a la capacité de traiter différents types d’images (telles que les caméras sténopé, les caméras fisheye, les caméras panoramiques).

2. Package d'étalonnage Autoware
Kit d'outils d'étalonnage de caméra lidar avec cadre Autoware.
Lien : https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
3. Calibrage de la cible basé sur la correspondance 3D-3D
Lidar basé sur la correspondance de points 3D-3D Calibrage de la caméra. , package ROS, tiré de l'article « Calibration LiDAR-Camera utilisant des correspondances de points 3D-3D » !
Lien : https://github.com/ankitdhall/lidar_camera_calibration
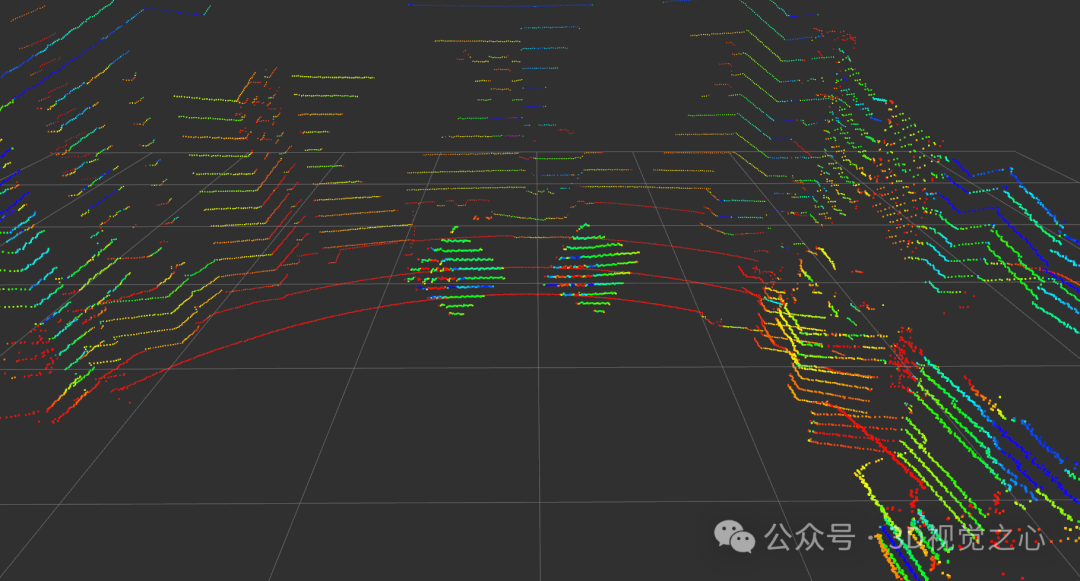
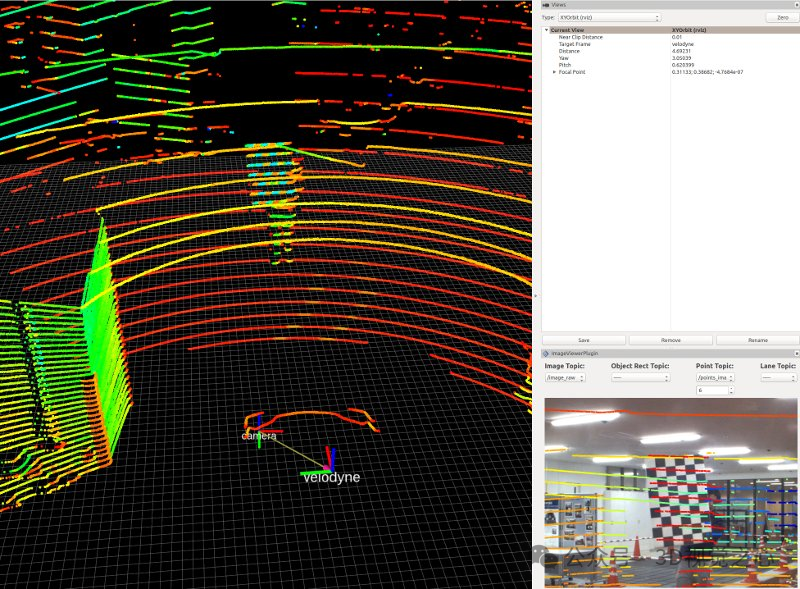
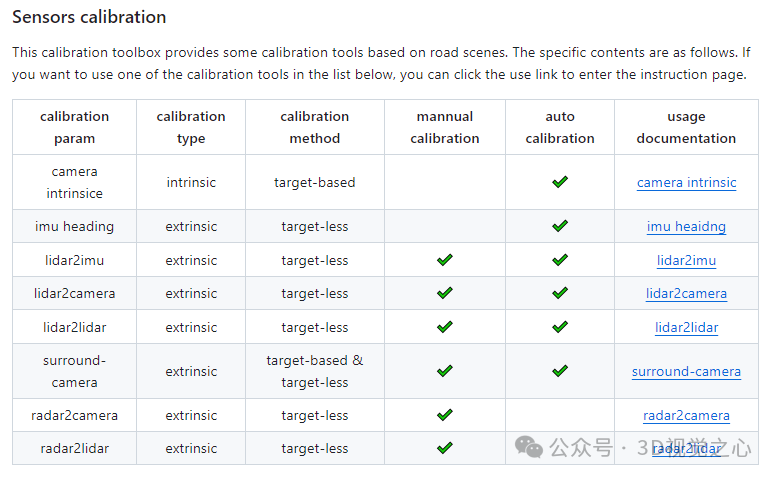
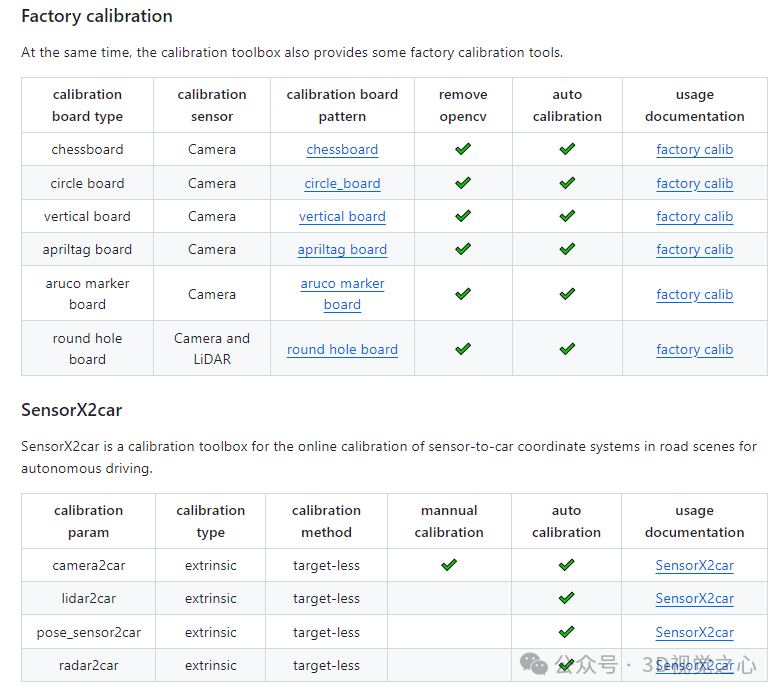
4. Shanghai AI Lab OpenCalib
Produit par le laboratoire d'intelligence artificielle de Shanghai, OpenCalib fournit une boîte à outils d'étalonnage de capteurs. La boîte à outils peut être utilisée pour calibrer des capteurs tels que l'IMU, le lidar, la caméra et le radar.
Lien : https://github.com/PJLab-ADG/SensorsCalibration
5.Outil d'étalonnage Apollo
Boîte à outils d'étalonnage Apollo, lien : https://github.com/ApolloAuto / apollo/tree/master/modules/calibration
6.Outil d'étalonnage de la caméra Livox
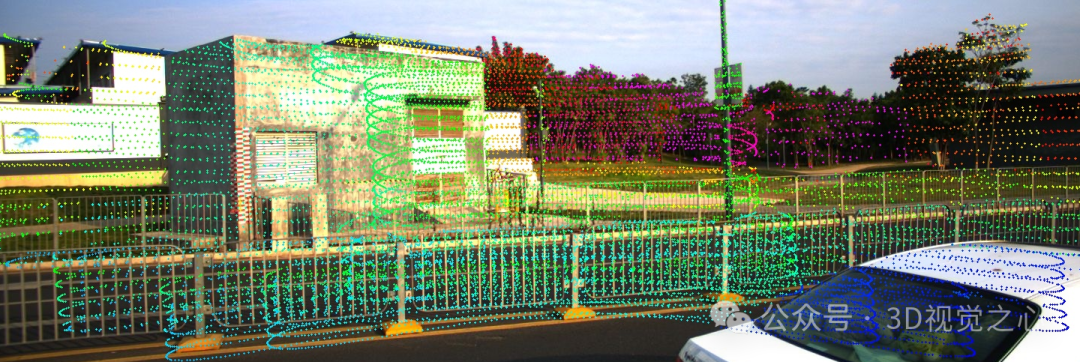
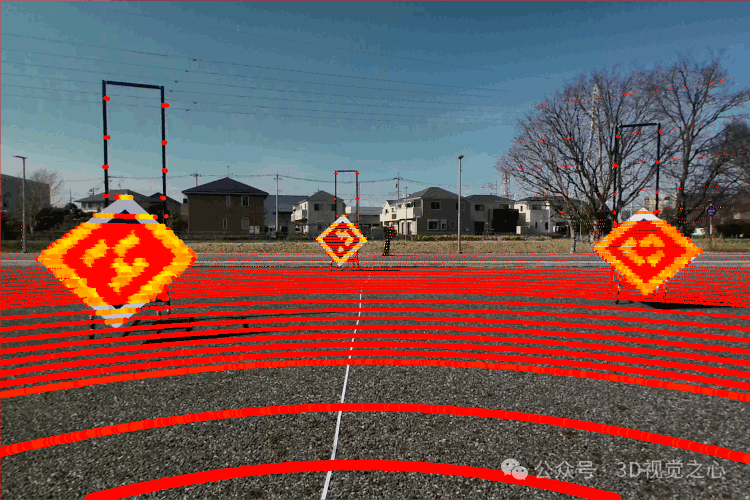
Cette solution fournit une méthode pour calibrer manuellement les paramètres externes entre le radar Livox et la caméra. Elle a été utilisée dans Mid-40, Horizon et. Télé Vérifié le -15. Il comprend des codes liés au calcul des paramètres internes de la caméra, à l'obtention des données d'étalonnage, à l'optimisation du calcul des paramètres externes et aux applications de fusion de caméras radar. Dans cette solution, les points d'angle de la plaque d'étalonnage sont utilisés comme cible d'étalonnage. En raison des caractéristiques de balayage non répétitives du radar Livox, la densité du nuage de points est relativement grande, ce qui facilite la recherche de la position précise de. les points d'angle dans le nuage de points radar. L'étalonnage et la fusion des caméras radar peuvent également donner de bons résultats.
Lien : https://github.com/Livox-SDK/livox_camera_lidar_calibration
Documentation chinoise : https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md
7.CalibrationTools
CalibrationTools fournit des outils d'étalonnage pour le lidar-lidar, la caméra lidar et d'autres paires de capteurs. En plus de cela, sont également fournis :
1) Positionnement - L'outil d'estimation du biais estime les paramètres des capteurs utilisés pour l'estime (IMU et odométrie) pour de meilleures performances de positionnement !
2) Outils de visualisation et d'analyse pour la sortie du contrôle Autoware ;
3) Outils d'étalonnage pour corriger les retards de commande des véhicules
Lien : https://github.com/tier4/CalibrationTools
8.
La propre boîte à outils de Matlab prend en charge l'étalonnage du lidar et des caméras, lien : https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html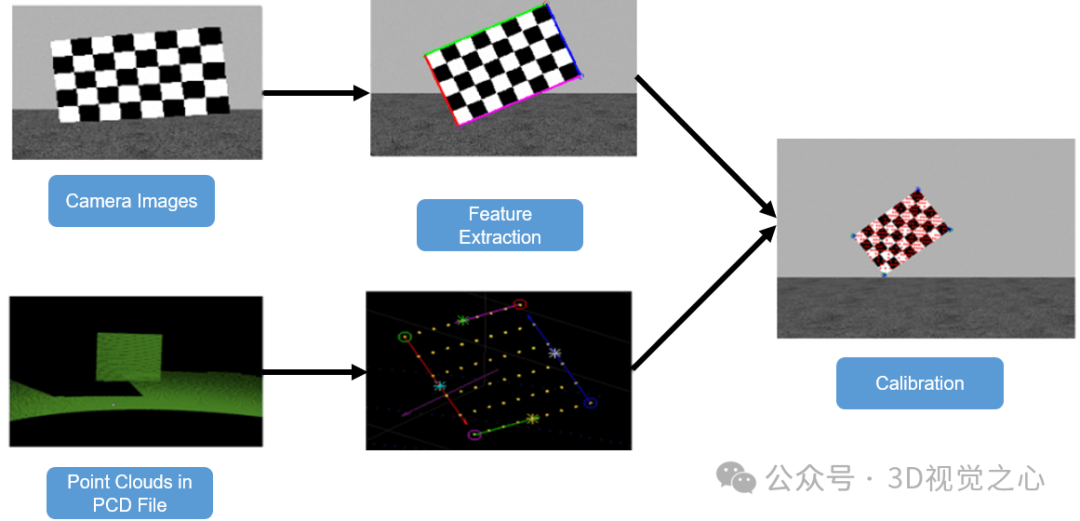
9.ROS calibration outil
Pack d'étalonnage LIDAR de la caméra ROS, lien : https://github.com/heethesh/lidar_camera_calibration
10. Calibrage visuel direct du lidar
Ce package fournit une boîte à outils pour le calibrage de la caméra lidar : Universel : Il peut gérer divers modèles de projection de lidar et de caméra, y compris le lidar à rotation et à balayage non répétitif, ainsi que caméras de projection sténopé, fisheye et omnidirectionnelles. Sans cible : Il ne nécessite pas de cibles d'étalonnage, mais utilise des structures et des textures d'environnement pour l'étalonnage. Prise unique : Le calibrage ne nécessite qu'au moins une paire de nuages de points lidar et d'images de caméra. En option, plusieurs paires de données de caméra lidar peuvent être utilisées pour améliorer la précision. Automatique : Le processus d'étalonnage est automatique et ne nécessite aucune estimation initiale. Précis et robuste :Il adopte un algorithme d'enregistrement de caméra lidar direct au niveau des pixels, qui est plus robuste et précis que l'enregistrement de caméra lidar indirect basé sur les bords.
Lien : https://github.com/koide3/direct_visual_lidar_calibration
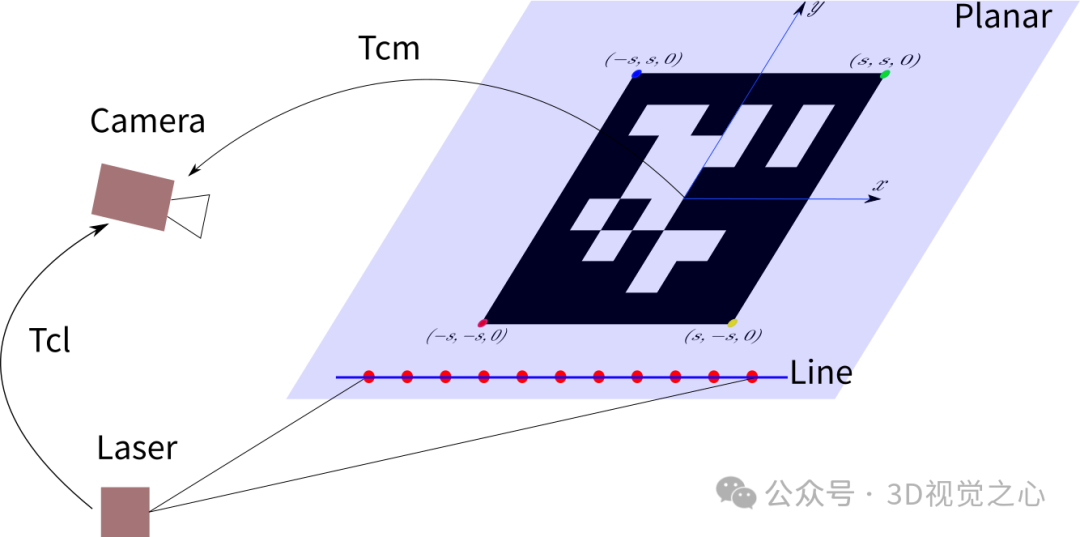
Boîte à outils de caméra lidar 11.2D
Il s'agit d'un code d'étalonnage automatique basé sur ROS pour les paramètres externes du laser et de la caméra à ligne unique. Le principe d'étalonnage est illustré dans la figure ci-dessous. La caméra estime l'équation du plan de la plaque d'étalonnage dans le système de coordonnées de la caméra via le code QR. Étant donné que le nuage de points laser tombe sur le plan, le nuage de points est converti en paramètres externes. du système de coordonnées de la caméra via le système de coordonnées laser. Dans le système de coordonnées de la caméra, la distance entre le point construit et le plan est utilisée comme erreur, qui est résolue à l'aide des moindres carrés non linéaires.
Lien : https://github.com/MegviiRobot/CamLaserCalibraTool
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!