Maison > Article > Périphériques technologiques > Avec une seule commande, vous pouvez préparer du café, verser du vin rouge et enfoncer des clous. La CoPa intelligente incarnée de Tsinghua est désormais disponible.
Avec une seule commande, vous pouvez préparer du café, verser du vin rouge et enfoncer des clous. La CoPa intelligente incarnée de Tsinghua est désormais disponible.

- WBOYavant
- 2024-03-18 14:50:11985parcourir
Récemment, de nombreux progrès ont été réalisés dans le sens de l'intelligence incarnée. Du RT-H de Google à la Figure 01 créée conjointement par OpenAI et Figure, les robots deviennent de plus en plus interactifs et polyvalents.
Si les robots deviennent à l’avenir des assistants dans la vie quotidienne des gens, quelles tâches attendez-vous d’eux qu’ils soient capables d’accomplir ? Préparez une tasse fumante de café infusé à la main, rangez le bureau et aidez-vous même à organiser un rendez-vous romantique. Le nouveau cadre d'intelligence incarnée de Tsinghua, « CoPa », peut accomplir ces tâches avec une seule commande.
CoPa (Robotic Manipulation through Spatial Constraints of Parts) est le dernier cadre intelligent proposé par l'équipe de recherche en robotique de l'Université Tsinghua sous la direction du professeur Gao Yang. Ce cadre atteint pour la première fois la capacité de généralisation du robot face à des tâches à longue distance et à des comportements 3D complexes dans une variété de scénarios.

Adresse papier : https://arxiv.org/abs/2403.08248
Page d'accueil du projet : https://copa-2024.github.io/
En raison du besoin de modèles de langage visuel Application unique des (VLM), CoPa peut généraliser dans des scénarios ouverts sans aucune formation spécifique et peut gérer des instructions complexes. Ce qui frappe le plus à propos de CoPa est sa capacité à démontrer une compréhension approfondie des propriétés physiques des objets de la scène, ainsi que ses capacités précises de planification et de manipulation.
Par exemple, CoPa peut aider les chercheurs à préparer une tasse de café infusé à la main : 
Dans cette tâche, CoPa peut non seulement comprendre le rôle de chaque objet dans un affichage de table complexe, mais également compléter leur contrôle grâce à des contrôle. Opérations physiques. Par exemple, dans la tâche « Verser l'eau de la bouilloire dans l'entonnoir », le robot déplace la bouilloire sur l'entonnoir et la fait pivoter avec précision à l'angle approprié afin que l'eau puisse s'écouler de l'embouchure de la bouilloire dans l'entonnoir.
CoPa peut également organiser avec soin un rendez-vous romantique. Après avoir compris les besoins du chercheur en matière de rencontres, CoPa l’a aidé à installer une belle table à manger occidentale. 
Tout en comprenant profondément les besoins des utilisateurs, CoPa démontre également sa capacité à manipuler des objets avec précision. Par exemple, dans la tâche « insérer une fleur dans un vase », le robot saisit d'abord la tige de la fleur, la fait tourner jusqu'à ce qu'elle soit face au vase, et enfin l'insère.

Introduction à la méthode
Flux d'algorithme
La plupart des tâches opérationnelles peuvent être décomposées en deux étapes : la saisie de l'objet et les actions ultérieures requises pour terminer la tâche. Par exemple, lors de l'ouverture d'un tiroir, nous devons d'abord saisir la poignée du tiroir, puis tirer le tiroir le long d'une ligne droite. Sur cette base, les chercheurs ont conçu deux étapes, à savoir d'abord via le « module de saisie orientée tâche (Task-Oriented Grasping) » pour générer la pose du robot saisissant l'objet, puis via le « module de planification de mouvement lié à la tâche ». Le module (Task-Aware) « Motion Planning) » génère la pose requise pour terminer la tâche après la saisie. Le transfert du robot entre des poses adjacentes peut être réalisé grâce à des algorithmes traditionnels de planification de trajectoire.
Module de détection de pièces importantes
Les chercheurs ont observé que la plupart des tâches de manipulation nécessitent une « compréhension détaillée au niveau des pièces » des objets de la scène. Par exemple, lorsque nous coupons avec un couteau, nous tenons le manche au lieu de la lame ; lorsque nous portons des lunettes, nous tenons la monture au lieu des verres. Sur la base de cette observation, l'équipe de recherche a conçu un « module de mise à la terre des parties grossières à fines » pour localiser les parties de la scène liées aux tâches. Plus précisément, CoPa localise d'abord les objets pertinents pour la tâche dans la scène grâce à une détection d'objets à gros grain, puis localise les parties de ces objets pertinentes pour la tâche grâce à une détection de pièces à grain fin.

Dans le "module de saisie orienté tâche", CoPa localise d'abord la position de saisie (telle que la poignée de l'outil) via le module de détection de pièces importantes. Ces informations de position sont utilisées pour filtrer GraspNet (un outil qui peut. générer un modèle de scènes de toutes les poses de préhension possibles), puis obtenir la pose de préhension finale.
Module de planification de mouvements liés aux tâches
Afin de permettre au grand modèle de langage visuel d'aider le robot à effectuer des tâches opérationnelles, cette recherche doit concevoir une interface qui permette non seulement au grand modèle de raisonner dans un langage, mais facilite également le fonctionnement du robot. L’équipe de recherche a découvert que lors de l’exécution des tâches, les objets liés aux tâches sont généralement soumis à de nombreuses contraintes géométriques spatiales. Par exemple, lors du chargement d'un téléphone portable, la tête de chargement doit être face au port de chargement ; lors du bouchage d'une bouteille, le capuchon doit être placé directement sur le goulot de la bouteille. Sur cette base, l’équipe de recherche a proposé d’utiliser les contraintes spatiales comme pont entre les grands modèles de langage visuel et les robots. Plus précisément, CoPa utilise d'abord un grand modèle de langage visuel pour générer les contraintes spatiales que les objets liés à la tâche doivent respecter lors de l'exécution de la tâche, puis utilise un module de résolution pour résoudre la pose du robot en fonction de ces contraintes.

Résultats expérimentaux
Évaluation des capacités de CoPa
CoPa a démontré de fortes capacités de généralisation dans des tâches opérationnelles réelles. CoPa possède une compréhension approfondie des propriétés physiques des objets de la scène, grâce à son utilisation de connaissances de bon sens intégrées dans de grands modèles du langage visuel.
Par exemple, dans la tâche « Marteler un clou », CoPa a d'abord saisi le manche du marteau, puis a fait tourner le marteau jusqu'à ce que la tête du marteau soit face au clou, et a finalement martelé vers le bas. La tâche nécessitait une identification précise du manche du marteau, de la face du marteau et de la face du clou, ainsi qu'une compréhension complète de leurs relations spatiales, démontrant la compréhension approfondie de CoPa des propriétés physiques des objets de la scène.
Dans la tâche consistant à "mettre la gomme dans le tiroir", CoPa a d'abord localisé l'emplacement de la gomme, puis a découvert qu'une partie de la gomme était enveloppée dans du papier, elle a donc intelligemment saisi cette partie pour s'assurer que le la gomme ne serait pas tachée.
Dans la tâche "insérer la cuillère dans la tasse", CoPa a d'abord saisi le manche de la cuillère, l'a traduit et l'a fait pivoter pour qu'elle soit face verticalement vers le bas, face à la tasse, et finalement l'a insérée dans la tasse, prouvant que CoPa peut facilement Bonne compréhension des contraintes géométriques spatiales que les objets doivent respecter pour accomplir des tâches.
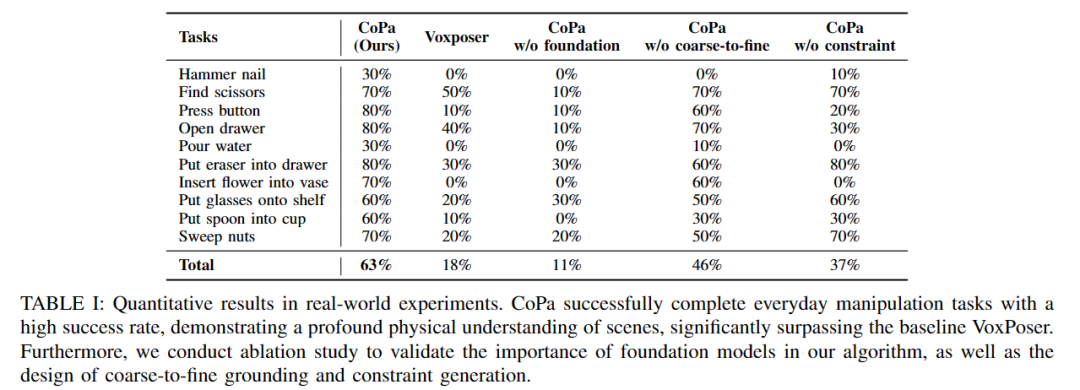
L'équipe de recherche a mené suffisamment d'expériences quantitatives sur 10 tâches du monde réel. Comme le montre le tableau 1, CoPa surpasse considérablement les méthodes de base ainsi que de nombreuses variantes d'ablation sur ces tâches complexes.
Expériences d'ablation
Les chercheurs ont démontré l'importance des trois composants suivants dans le cadre CoPa à travers une série d'expériences d'ablation : modèle de base, détection de pièces grossières à fines et génération de restrictions spatiales. Les résultats expérimentaux sont présentés dans le tableau 1 ci-dessus.
Modèle de base
L'expérience CoPa sans ablation de fondation dans le tableau supprime l'utilisation du modèle de base dans CoPa et utilise à la place un modèle de détection pour localiser les objets et une méthode basée sur des règles pour générer des contraintes spatiales. Les résultats expérimentaux montrent que le taux de réussite de cette variante d’ablation est très faible, prouvant le rôle important des riches connaissances de bon sens contenues dans le modèle de base de CoPa. Par exemple, dans la tâche « Sweeping Nuts », la variante d'ablation ne sait pas quel outil de la scène est adapté au balayage.
Détection de pièces grossières à fines
L'expérience CoPa sans ablation grossière à fine dans le tableau supprime la conception de détection de pièces CoPa grossière à fine et utilise directement la segmentation à grain fin pour localiser des objets. Cette variante dégrade considérablement les performances dans la tâche relativement difficile de localisation de parties importantes d'un objet. Par exemple, dans la tâche « Marteler un clou », l'absence de conception « grossière à fine » rend difficile l'identification de la surface du marteau.
Génération de contraintes spatiales
L'expérience CoPa sans ablation de contraintes dans le tableau supprime le module de génération de contraintes spatiales de CoPa et permet à la place au grand modèle de langage visuel de générer directement les valeurs spécifiques du robot. pose cible. Les expériences montrent qu'il est très difficile de produire directement la pose de la cible du robot sur la base d'images de scène. Par exemple, dans la tâche « verser de l'eau », la bouilloire doit être inclinée selon un certain angle, et cette variante est totalement incapable de générer la posture du robot à ce moment-là.
Pour plus d'informations, veuillez vous référer au document original.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- La robotique pour améliorer la sécurité dans la production pétrolière et gazière
- Un guide technique des chatbots en PHP
- AI Weekly News : Ma Huateng a déclaré que l'IA est une opportunité unique, qu'OpenAI utilise iOS pour verrouiller la rigidité des utilisateurs et que l'intelligence incarnée permet à l'IA de percevoir le monde réel. Insight Research |
- Pour aider au développement de l'industrie Yuanverse, ce concours d'applications innovantes de communication mobile a été lancé
- Ministère de l'Industrie et des Technologies de l'information : l'industrie de base de l'IA en Chine atteint 500 milliards de yuans, et plus de 2 500 ateliers numériques et usines intelligentes ont été construits