
Maison >Périphériques technologiques >IA >MapEX au-delà de SOTA : améliorations étonnantes des performances et technologie de perception sans mappage
MapEX au-delà de SOTA : améliorations étonnantes des performances et technologie de perception sans mappage

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-01-10 22:06:221149parcourir
Écrit avant et compréhension personnelle de l'auteur
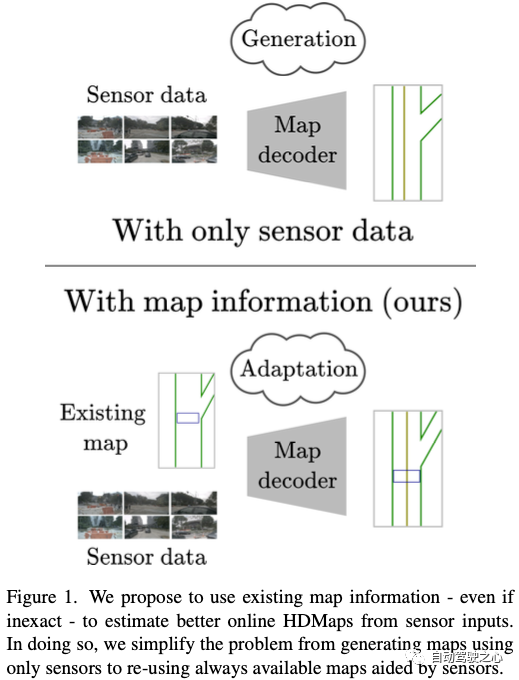
Après avoir lu cet article, aurez-vous l'illusion que la perception sans image est terminée ? ? ? MapEX vient de sortir. J'ai hâte d'absorber l'essence d'une vague d'articles et de les partager avec tout le monde. Le cœur de MapEX est d'utiliser les informations cartographiques stockées historiquement pour optimiser la construction de cartes locales actuelles de haute précision. La carte historique peut être une carte avec seulement quelques éléments cartographiques simples (tels que les limites des routes) ou une carte avec du bruit (tels que). la déviation de chaque élément de la carte), se déplacer de 5 m), ou il peut s'agir d'une ancienne carte (par exemple, seule une petite partie des éléments de la carte peut être alignée avec la scène actuelle). De toute évidence, ces informations cartographiques historiques sont utiles pour la construction actuelle de cartes locales de haute précision, ce qui nous amène également au cœur de cet article, à savoir comment les utiliser ? ? ? Plus précisément, MapEX est construit sur la base de MapTRv2. Ces informations cartographiques historiques peuvent être codées dans une série de requêtes et assemblées avec la requête d'origine, et le décodeur génère en outre les résultats de prédiction. L'article est toujours très intéressant~
Aperçu général de l'article
La carte en ligne de haute précision (HDMap) générée par le capteur est considérée comme une alternative peu coûteuse à l'acquisition manuelle traditionnelle de HDMap, elle devrait réduire le coût des systèmes de conduite autonome qui s'appuient sur HDMap , et il est également possible de l'appliquer à de nouveaux systèmes.
Cet article propose une méthode pour améliorer l'estimation HDMap en ligne en considérant les cartes existantes pour l'optimisation. Dans l’étude, les auteurs ont identifié trois types raisonnables de cartes existantes, notamment les cartes simples, les cartes bruitées et les anciennes cartes. De plus, cet article présente un nouveau cadre de création HDMap en ligne appelé MapEX pour détecter les cartes existantes. MapEX atteint cet objectif en codant les éléments cartographiques sous forme de requêtes et en améliorant l'algorithme de correspondance du modèle d'estimation cartographique classique basé sur des requêtes.
L'article montre enfin l'amélioration significative de MapEX sur le jeu de données nuScenes. Par exemple, MapEX (avec une carte bruyante) s'améliore de 38 % par rapport à la détection MapTRv2 et est 16 % meilleure que l'état actuel de la technique.
En résumé, les principales contributions de MapEX peuvent être résumées comme suit :
- Considérer les informations cartographiques existantes lors de l'estimation des cartes HDMaps en ligne à partir des données de capteurs ;
- Discuter des cas raisonnables où les cartes existantes sont incomplètes ; Nous fournissons également des implémentations pratiques et du code pour ces scènes pour l'ensemble de données nuScenes ;
- Présentation de MapEX, un nouveau schéma d'acquisition HDMap basé sur des requêtes qui peut incorporer des informations cartographiques lors de l'estimation de HDMap en ligne à partir de capteurs. En particulier, une nouvelle façon de combiner les informations cartographiques existantes avec les requêtes (EX) existantes a été introduite dans MapEX, ainsi qu'une manière d'aider le modèle à apprendre à exploiter ces informations en pré-attribuant des prédictions à GT lors de la méthode d'entraînement.
Examen des travaux de construction de cartes locales de haute précision en ligne
Ici, nous décrivons brièvement certains contenus sur les cartes de haute précision (HDMaps) dans la conduite autonome. Tout d’abord, nous avons exploré l’utilisation de HDMap dans la prédiction de trajectoire, puis nous avons expliqué comment obtenir ces données cartographiques. Enfin, nous discutons du processus de construction de HDMap en ligne.
HDMaps for Trajectory Prediction : La conduite autonome nécessite souvent une grande quantité d'informations sur le monde dans lequel le véhicule navigue. Ces informations sont souvent intégrées dans de riches HDMaps et servent d'entrée pour modifier les réseaux neuronaux. Les HDMaps se sont révélés essentiels à la performance de la prédiction de trajectoire. En particulier dans la prédiction de trajectoire, certaines méthodes sont explicitement basées sur la représentation de HDMap, l'accès à HDMap est donc absolument requis.
Acquisition et maintenance HDMap : Les coûts traditionnels d'acquisition et de maintenance HDMap sont élevés. Bien que les HDMaps utilisés dans les prévisions ne soient qu'une version simplifiée contenant des éléments cartographiques (séparateurs de voies, limites de route, etc.) et fournissant une grande partie des informations complexes trouvées dans les HDMaps complets, ils nécessitent néanmoins des mesures très précises. De ce fait, de nombreuses entreprises s’orientent vers des standards moins exigeants pour les cartes moyenne définition (MDMaps) voire vers des cartes de navigation (Google Maps, SDMaps). Surtout, un MDMap avec une précision de quelques mètres sera un bon exemple de carte existante, fournissant des informations précieuses pour le processus de génération HDMap en ligne. Notre scénario cartographique 2a explore une approximation de cette situation.
Construction HDMap en ligne de capteurs : La construction HDMap en ligne est donc devenue le cœur de la perception de l'image lumineuse/sans image. Alors que certains travaux se concentrent sur la prédiction d'éléments cartographiques virtuels, c'est-à-dire les lignes centrales des voies, d'autres se concentrent sur des éléments cartographiques plus visuellement identifiables : séparateurs de voies, limites de route et passages pour piétons. Peut-être parce que les éléments visuels sont plus faciles à détecter par les capteurs, cette dernière approche a progressé rapidement au cours de la dernière année. Il est intéressant de noter que la dernière méthode de ce type, Map-TRv2, fournit un paramètre auxiliaire pour détecter les lignes centrales réelles des voies. Cela montre une convergence vers des schémas plus complexes, incluant un grand nombre d’éléments cartographiques supplémentaires (feux tricolores, etc.).
Le travail de cet article est similaire aux problèmes de détection de changements couramment étudiés, qui visent à détecter des changements (par exemple des intersections) dans des cartes. L'objectif de MapEX est de générer une HDMap en ligne précise à l'aide de cartes existantes (éventuellement très différentes), ce qui est réalisé pour le problème actuel de construction de HDMap en ligne. Par conséquent, nous avons non seulement corrigé de petites erreurs dans la carte, mais avons également proposé un cadre plus expressif pouvant s'adapter à tout changement (par exemple, lignes déformées, éléments très bruyants).
Quelles cartes existantes pouvons-nous utiliser ?
Notre proposition principale est que l'exploitation des cartes existantes facilitera la construction de HDMaps en ligne. Nous pensons qu'il existe de nombreuses circonstances légitimes dans lesquelles des cartes imparfaites peuvent apparaître.
Représentation HDMap en ligne
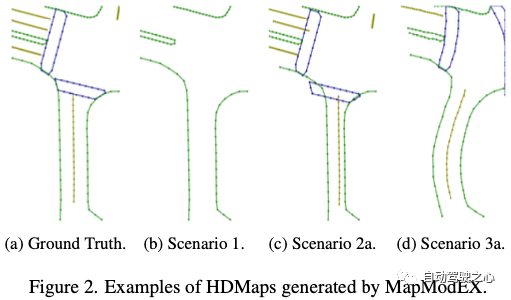
Nous adoptons le format standard pour la génération en ligne de HDMaps à partir de capteurs : Nous pensons que les HDMaps se composent de 3 types de polylignes, de limites de route, de séparations de voies et de passages pour piétons, dont les couleurs sont différentes des précédentes. vert et gris pierre respectivement Identique au bleu, comme le montre la figure 2a.
Bien que les véritables HDMaps soient beaucoup plus complexes et que des représentations plus sophistiquées aient été proposées, le but de ce travail est d'étudier comment interpréter les informations cartographiques existantes. Nous utilisons donc le paradigme le plus étudié. Les travaux de cet article seront directement applicables à la prédiction d'un plus grand nombre d'éléments cartographiques, de polylignes plus fines ou de cibles rastérisées.
MapModEX : Simulation de cartes imparfaites
Étant donné que l'acquisition de cartes standard est coûteuse et prend du temps, nous avons généré synthétiquement des cartes imprécises à partir de HDMaps existantes.
Pour cela nous avons développé MapModEX, une bibliothèque indépendante de modification de cartes. Il prend des fichiers de cartes nuScenes et des échantillons d'enregistrements et génère pour chaque échantillon les coordonnées polylignes des trottoirs, des limites et des passages pour piétons dans une zone donnée autour du véhicule de l'ego. Surtout, MapModEX offre la possibilité de modifier ces polylignes pour refléter diverses modifications : suppression d'éléments de carte, ajout, mouvement de passages pour piétons, ajout de bruit aux coordonnées de points, mouvement de carte, rotation de carte et distorsion de carte. MapModEX sera disponible dès sa sortie pour faciliter la recherche plus approfondie des cartes existantes dans l'acquisition HDMap en ligne du capteur.
Nous avons implémenté trois scénarios difficiles à l'aide du package MapModEX, comme décrit ci-dessous, générant 10 variantes des scénarios 2 et 3 pour chaque échantillon (le scénario 1 n'autorise qu'une seule variante). Nous avons choisi d'utiliser un ensemble fixe de cartes modifiées pour réduire les coûts lors de la formation et refléter des situations réelles où seul un nombre limité de variantes de cartes peuvent être disponibles.
Scénario 1 : Seules les frontières disponibles
Le premier scénario est que seule une carte HDMap approximative (sans séparateurs ni passages pour piétons) est disponible, comme le montre la figure 2b. Les limites des routes sont souvent associées à des repères physiques 3D tels que les bords des trottoirs, tandis que les trottoirs et les passages pour piétons sont souvent représentés par des repères plats plus faciles à manquer. De plus, les passages pour piétons et les séparateurs de voies sont souvent abandonnés en raison de travaux de construction ou de déviations de route, ou même partiellement cachés par des traces de pneus.
Il est donc logique d'utiliser des HDMaps avec uniquement des bordures. L’avantage est qu’elle ne nécessite qu’un étiquetage des contraintes routières, ce qui peut réduire le coût de l’étiquetage. De plus, la localisation uniquement des limites de route peut nécessiter un équipement et des mises à jour moins précis. Mise en œuvre D'un point de vue pratique, la mise en œuvre du scénario 1 est simple : on supprime les cloisons et les passages pour piétons des HDMaps disponibles.
Scénario 2 : Carte bruyante
Le deuxième scénario possible est que nous n'avons qu'une carte très bruyante, comme le montre la figure 2c. Une faiblesse des HDMaps existantes est la nécessité d'une grande précision (de l'ordre de quelques centimètres), ce qui exerce une forte pression sur leur acquisition et leur maintenance [11]. En fait, une différence clé entre HDMaps et la nouvelle norme MDMaps est la moindre précision (quelques centimètres contre quelques mètres).
Nous recommandons donc d'utiliser des HDMaps bruyants pour simuler des situations où des cartes moins précises peuvent être dues à des processus d'acquisition moins coûteux ou à l'utilisation du standard MDMaps à la place. Ce qui est encore plus intéressant, c'est que ces cartes moins précises peuvent être automatiquement dérivées des données des capteurs. Bien que des méthodes comme MapTRv2 aient atteint des performances très impressionnantes, elles ne sont pas encore totalement précises : même avec des seuils de récupération très flexibles, la précision des prédictions est bien inférieure à 80 %.
Implémentation : Nous proposons deux implémentations possibles de ces HDMaps bruyantes pour refléter diverses conditions dans lesquelles nous pouvons manquer de précision. Dans le premier scénario 2a, nous proposons une configuration de bruit décalé, dans laquelle pour chaque positionnement d'élément de carte, nous ajoutons du bruit provenant d'une distribution gaussienne avec un écart type de 1 mètre. Cela a pour effet d'appliquer une translation uniforme à chaque élément de la carte (séparateurs, bordures, passages pour piétons). Une telle configuration devrait fournir une bonne approximation de la situation dans laquelle des annotateurs humains fournissent rapidement des annotations imprécises à partir de données bruitées. Nous avons choisi un écart type de 1 mètre pour refléter la norme MDMaps avec une précision de quelques mètres.
Nous testons ensuite notre méthode sur un scénario de bruit ponctuel 2b très difficile : pour chaque point de vérité terrain - rappelez-vous, un élément de carte est constitué de 20 de ces points - nous commençons par un écart type du bruit d'échantillon d'une distribution gaussienne de 5 mètres et ajoutez-le aux coordonnées du point. Cela fournit une approximation dans le pire des cas pour les situations dans lesquelles la carte acquiert automatiquement ou fournit un positionnement très imprécis.
Scénario 3 : La carte a considérablement changé
Le dernier scénario que nous envisageons est celui où nous avons accès à une ancienne carte qui était exacte dans le passé (voir Figure 2d). Il est assez courant que les marquages peints tels que les passages pour piétons se déplacent de temps en temps. De plus, la ville a rénové en profondeur certaines intersections problématiques ou rénové des zones pour s'adapter à l'augmentation du trafic généré par les nouvelles attractions.
C'est donc amusant de travailler avec des HDMaps, ils sont valables en eux-mêmes mais ne sont pas dans une large mesure les mêmes que les HDMaps réels. Lorsque les HDMaps n'étaient mises à jour que toutes les quelques années par les responsables pour réduire les coûts, ces cartes auraient dû être disponibles fréquemment. Dans ce cas, la carte existante fournira toujours certaines informations sur le monde, mais ne reflétera peut-être pas les changements temporaires ou récents.
Mise en œuvre : Nous approchons cela en apportant des modifications importantes aux HDMaps existantes dans le scénario 3a. Nous avons supprimé 50 % des passages pour piétons et des séparateurs de voies sur la carte, ajouté quelques passages pour piétons (la moitié des passages pour piétons restants) et enfin appliqué une petite déformation à la carte.
Cependant, il est important de noter qu’une grande partie de la carte mondiale restera inchangée au fil du temps. Nous comptons cela dans notre scénario 3b, où nous étudions l’impact du choix aléatoire (avec probabilité p = 0,5) de considérer la vraie HDMap au lieu de la version perturbée.
MapEX : Utiliser des cartes existantes
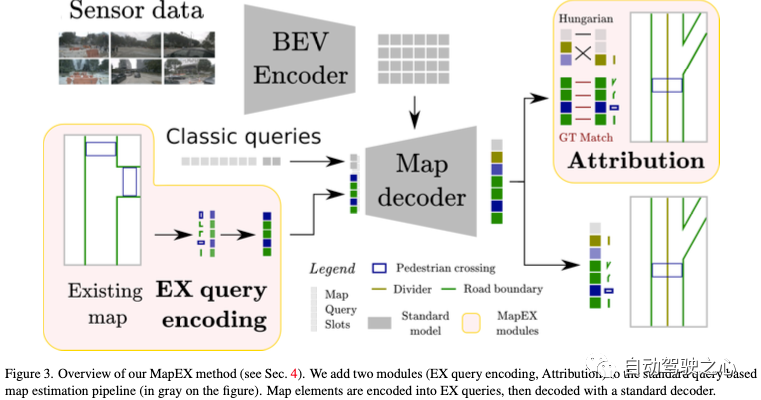
À cet effet, nous proposons MapEX (voir Figure 3), un nouveau cadre pour la construction de HDMap en ligne. Il suit le paradigme standard de construction HDMap en ligne basé sur des requêtes et traite les informations cartographiques existantes via deux modules clés : le module d'encodage des requêtes cartographiques et le schéma de prédiction et de pré-attribution GT. Cet article construit une base de référence basée sur MapTRv2.
Vue d'ensemble
Le noyau basé sur les requêtes est représenté par les éléments gris dans la figure 3. Il prend d'abord l'entrée du capteur (caméra ou lidar) et l'encode dans une représentation Bird's Eye View (BEV) en tant que caractéristiques du capteur. Utilisez un schéma de détection de type DETR pour détecter les éléments de la carte (jusqu'à N) afin d'obtenir la carte elle-même. Ceci est réalisé en transmettant N × L jetons de requête appris (N est le nombre maximum d'éléments détectés, L est le nombre de points prédits pour l'élément) dans un décodeur Transformer, qui utilise les fonctionnalités BEV avec l'attention croisée qui alimente les informations du capteur pour le jeton de requête. Les requêtes décodées sont ensuite transformées en coordonnées d'éléments de carte via une couche linéaire avec des prédictions de classe (y compris des classes d'arrière-plan supplémentaires), de telle sorte que L groupes de requêtes représentent L points de l'élément de carte (L = 20 dans cet article). La formation est effectuée en faisant correspondre les éléments cartographiques prédits et les éléments cartographiques GT à l'aide d'une variante de l'algorithme hongrois. Une fois mis en correspondance, le modèle est optimisé pour que l'élément cartographique prédit corresponde au GT auquel il répond, en utilisant les pertes de régression (pour les coordonnées) et de classification (pour les catégories d'éléments).
Mais ce framework ne peut pas interpréter les cartes existantes, ce qui nécessite l'introduction de nouveaux modules à deux niveaux clés. Au niveau des requêtes, nous codons les éléments de la carte dans des requêtes EX impossibles à apprendre. Au niveau de correspondance, nous ajoutons les attributs de requête aux éléments de la carte GT qu'ils représentent.
Le framework MapEX complet (illustré dans la figure 3) convertit les éléments cartographiques existants en requêtes cartographiques non apprenables et ajoute des requêtes apprenables pour atteindre un certain nombre de requêtes N×L. Cet ensemble complet de requêtes est ensuite transmis au décodeur Transformer et transformé en prédictions via une couche linéaire comme d'habitude. Lors de l'entraînement, notre modèle d'attribution pré-associe certaines prédictions à GT et les prédictions restantes sont normalement mises en correspondance à l'aide de la correspondance hongroise. Au moment du test, les requêtes décodées hors arrière-plan produisent des représentations HDMap.
Convertir la carte en requête EX
Il n'existe aucun mécanisme dans le cadre actuel de création de HDMap en ligne pour interpréter les informations cartographiques existantes. Par conséquent, nous devons concevoir un nouveau schéma capable de traduire les cartes existantes sous une forme compréhensible par le cadre de construction HDMap en ligne standard basé sur des requêtes. Nous proposons une méthode simple utilisant MapEX pour encoder des éléments de carte existants dans une requête EX pour le décodeur, comme le montre la figure 4.
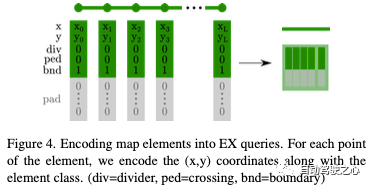
Pour un élément cartographique donné, nous extrayons L points équidistants, où L est le nombre de points que nous cherchons à prédire pour tout élément cartographique. Pour chaque point, nous effectuons une requête EX qui encode ses coordonnées cartographiques (x, y) dans les 2 premières dimensions et la classe d'éléments cartographiques (diviseur, intersection ou limite) dans les 3 dimensions suivantes. Effectuez un codage unique. Le reste de la requête EX est complété par des 0 pour atteindre la taille de requête standard utilisée par l'architecture du décodeur.
Bien que cette conception de requête soit très simple, elle offre les principaux avantages de coder directement les informations d'intérêt (coordonnées des points et classes d'éléments) et de minimiser les conflits avec les requêtes apprises (grâce au remplissage riche de 0).
Une fois que nous avons un ensemble de L requêtes (pour les éléments de carte dans une carte existante), nous pouvons récupérer ( ) un ensemble de L requêtes apprenables catégorielles à partir du pool de requêtes apprenables standard. Ensuite, en suivant la méthode de cet article, les requêtes N×L générées sont transmises au décodeur : dans MapTR, les requêtes N×L sont traitées comme des requêtes indépendantes, tandis que MapTRv2 utilise un schéma d'attention découplé plus efficace pour combiner les mêmes éléments de carte. des requêtes sont regroupées. Après avoir prédit les éléments cartographiques à partir de la requête, ils peuvent être utilisés directement au moment du test ou mis en correspondance avec le GT entraîné.
Attribution des éléments cartographiques
Bien que les requêtes EX introduisent un moyen d'interpréter les informations cartographiques existantes, rien ne garantit que le modèle utilise correctement ces requêtes pour estimer les éléments correspondants. En fait, s’il est utilisé seul, le réseau ne reconnaîtra même pas une requête EX totalement précise. Par conséquent, nous introduisons la pré-attribution des éléments de prédiction et de GT avant d'utiliser l'appariement hongrois traditionnel dans la formation, comme le montre la figure 3.
En termes simples, nous gardons une trace de chaque élément de la carte dans la carte modifiée, à quel élément de la carte GT ils correspondent : si l'élément de la carte n'est pas modifié, décalé ou déformé, nous pouvons le comparer avec l'élément de la carte d'origine dans la carte réelle Entrer en contact. Pour garantir que le modèle apprend à utiliser uniquement les informations utiles, nous maintenons uniquement une correspondance au niveau du score de déplacement moyen par point entre l'élément de carte modifié et l'élément de carte réel :

Entre un GT donné et un pré-prédit élément de carte Correspondance, nous pouvons supprimer les éléments de carte pré-attribués du pool d'éléments à faire correspondre. Les éléments cartographiques restants (prédits et GT) sont ensuite mis en correspondance en utilisant une variante de l'algorithme hongrois, comme c'est l'habitude. Par conséquent, l'étape de correspondance hongroise doit uniquement identifier quelles requêtes EX correspondent à des éléments de carte ajoutés qui n'existent pas, et trouver des requêtes standard apprises qui correspondent à certains éléments de carte réels qui n'existent pas dans la carte réelle (en raison de suppressions ou de fortes perturbations). .
Réduire le nombre d'éléments que l'algorithme hongrois doit traiter est important car même la variante la plus efficace a une complexité cubique ()[8]. Il ne s’agit pas d’une faiblesse majeure de la plupart des méthodes d’acquisition HDMap en ligne actuelles, car les cartes prédites sont petites (30 m × 60 m) et seuls trois types d’éléments cartographiques sont prédits. Cependant, à mesure que la génération de cartes en ligne se développe, il devient nécessaire de prendre en charge un nombre croissant d'éléments cartographiques à mesure que les cartes prédictives deviennent plus grandes et plus complètes.
Résultats expérimentaux
Configuration : Nous avons évalué le framework MapEX sur l'ensemble de données nuScenes car il s'agit de l'ensemble de données d'évaluation standard pour l'estimation HDMap en ligne. Nous sommes basés sur le framework MapTRv2 et la base de code officielle. Conformément à la pratique courante, nous rapportons la précision moyenne de trois types d'éléments cartographiques (diviseur, limite, croisement) à différents seuils de récupération (distance de chanfrein de 0,5 m, 1,0 m et 1,5 m), ainsi que le mAP des trois catégories.
Pour chaque expérience, 3 expériences ont été menées en utilisant trois graines aléatoires fixes. Il est important de noter que pour une combinaison donnée de graines et de scènes cartographiques, les données cartographiques existantes fournies lors de la validation sont corrigées pour faciliter la comparaison. Par souci de cohérence, nous rapportons les résultats sous forme de moyenne ± écart type, à la virgule décimale la plus proche, même si l'écart type dépasse cette précision.
Performances de MapEX
Nous fournissons une comparaison des méthodes associées dans le tableau 2, ainsi que les performances de MapEX : carte sans séparateurs de voie ni passages pour piétons (S1), carte avec bruit (S2a pour les éléments de carte décalés, S2b pour fort bruit ponctuel) et des cartes largement changeantes (S3a contient uniquement ces cartes, S3b contient des cartes réelles mixtes). Nous comparons de manière exhaustive les performances de MapEX aux évaluations HDMap en ligne existantes sur des paramètres comparables (entrée caméra, backbone CNN) et à l'état de l'art actuel (qui utilise beaucoup plus de ressources).
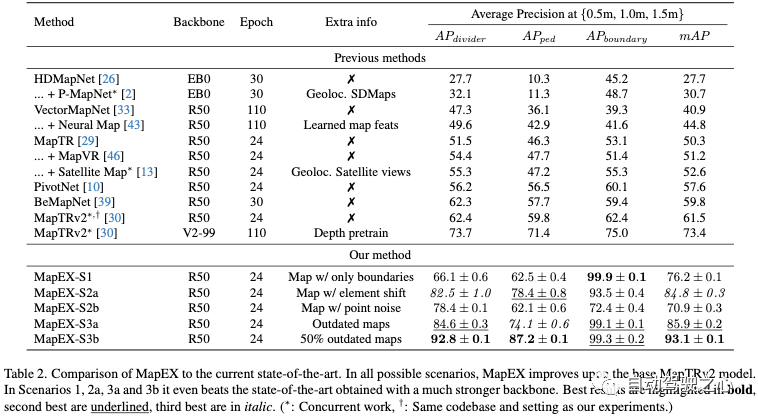
Premièrement, il ressort clairement du tableau 2 que tout type d'informations cartographiques existantes permet à MapEX de surpasser considérablement la littérature existante dans des contextes comparables, quel que soit le scénario considéré. Dans tous les cas sauf un, les informations cartographiques existantes ont même permis à MapEX de mieux fonctionner que le modèle MapTRv2 de pointe actuel, qui utilise un grand squelette ViT pré-entraîné sur un vaste ensemble de données d'estimation de profondeur en quatre entraînements en deux fois plus de périodes. . Même le scénario S2a, plutôt conservateur, avec un positionnement imprécis des éléments cartographiques obtient une amélioration du score mAP de 11,4 (soit 16 %).
Dans tous les scénarios, nous observons des améliorations constantes par rapport au modèle de base MapTRv2 sur les 4 métriques. Naturellement, le scénario 3b (utilisant des cartes existantes précises la moitié du temps) a produit de loin les meilleures performances globales, démontrant ainsi la forte capacité à identifier et à exploiter des cartes existantes pleinement précises. Le scénario 2a (avec des éléments cartographiques décalés) et le scénario 3a (avec des éléments cartographiques "obsolètes") offrent de très bonnes performances globales, avec de bonnes performances pour les trois types d'éléments cartographiques. Dans le scénario 1, seules les limites des routes sont disponibles, montrant d'énormes. Gains mAP dus à leur récupération de limite (attendue) très puissante, même dans le scénario extrêmement difficile 2b, où un bruit gaussien avec un écart type de 5 mètres est appliqué à chaque point d'élément de la carte. Il y aura également des gains significatifs par rapport au modèle de base. avec des performances de récupération particulièrement bonnes pour les délimiteurs et les limites
Améliorations apportées à MapEX
Nous nous concentrons désormais plus spécifiquement sur ce que les informations cartographiques existantes apportent à MapEX. Pour référence, nous comparons les gains de MapEX avec ceux apportés par d'autres sources. d'informations supplémentaires : Neural Map Prior avec des cartes de caractéristiques apprises globalement et P-MapNet utilisant SDMaps géolocalisés s'appuie sur un modèle de base plus solide que ces méthodes, bien que cela rende plus difficile l'amélioration du modèle de base, mais également plus facile à améliorer. obtenir des scores élevés. Pour éviter d'avoir un avantage injuste, les scores absolus sont fournis dans le tableau 3.
Nous voyons dans le tableau 3 que l'utilisation de MapEX avec tout type de carte existante entraîne un gain mAP global plus important que toute autre source d'informations supplémentaires (y compris la configuration P-MapNet plus complexe). Nous observons ce modèle dans les voies. Les performances de détection sur les séparateurs et les limites de route sont grandement améliorées. Un léger exemple est le scénario 1 (uniquement accès aux limites de route), où le modèle conserve avec succès les informations cartographiques sur. les limites, mais uniquement là où il n'y a pas d'informations préalables. Les passages pour piétons fournissent des améliorations comparables par rapport aux méthodes précédentes sur les deux éléments de la carte. Il semble que des informations plus précises provenant des cartes existantes soient nécessaires, comme dans les scénarios 1 et 2b (en appliquant un bruit extrêmement destructeur à chaque point de la carte). ) ne peut être obtenu. Fournit une amélioration comparable par rapport aux techniques existantes. Le scénario 2a (élément modifié) et le scénario 3a (carte "obsolète") donnent des scores de détection de passage pour piétons élevés, probablement parce que ces deux scénarios contiennent des informations plus précises.Expériences d'ablation 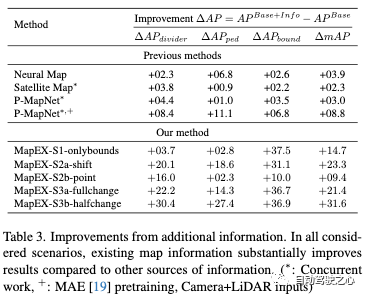
Contribution des entrées MapEX Le tableau 4 montre comment différents types d'entrées (cartes existantes, correspondances d'éléments de carte et entrées de capteurs) affectent de manière significative les performances de MapEX
À propos de l'encodage des requêtes EX. Le tableau 5 montre que la requête EX apprise fonctionne bien moins bien que notre simple requête EX non apprenable. Fait intéressant, la requête EX apprenable est initialisée avec des valeurs non apprenables peut apporter de très petites améliorations qui ne justifient pas la complexité supplémentaire 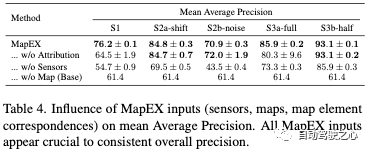
Sur l'attribution de la vérité sur le terrain
Étant donné que la prédétermination des attributs des éléments cartographiques est importante pour utiliser pleinement les informations cartographiques existantes, il peut être facile de prédéterminer les attributs de tous les éléments cartographiques correspondants au lieu de les filtrer comme dans le tableau 6 de MapEX. les éléments cartographiques existants sont trop différents, il est en effet préférable de supprimer les correspondances plutôt que de le faire sans discernement. L'attribution conduit à de meilleures performances. Essentiellement, cela suggère que MapEX a intérêt à utiliser des requêtes apprenables plutôt que des requêtes EX lorsque les éléments cartographiques existants diffèrent trop de la vérité terrain. 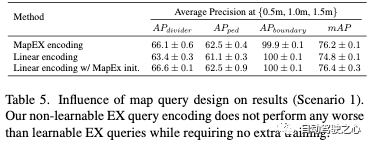
Discussion
Cet article propose d'exploiter les cartes existantes pour améliorer la construction de HDMap en ligne. Pour étudier cela, les auteurs décrivent trois scénarios réalistes dans lesquels des cartes existantes (simples, bruyantes ou obsolètes) sont disponibles et introduisent un nouveau cadre MapEX pour exploiter ces cartes. Puisqu'il n'existe aucun mécanisme dans le cadre actuel pour prendre en compte les cartes existantes, nous avons développé deux nouveaux modules : un pour encoder les éléments de la carte dans des requêtes EX et un autre pour garantir que le modèle utilise ces requêtes.
Les résultats expérimentaux montrent que les cartes existantes représentent des informations clés pour la construction de HDMap en ligne et que MapEX améliore considérablement les méthodes comparables dans tous les cas. En fait, en termes de mAP - Scénario 2a avec des éléments cartographiques se déplaçant de manière aléatoire - il s'améliore de 38 % par rapport au modèle de base MapTRv2 et de 16 % par rapport à l'état de l'art actuel.
Nous espérons que ces travaux mèneront à de nouvelles méthodes de construction de HDMap en ligne pour interpréter les informations existantes. Les cartes existantes, bonnes ou mauvaises, sont largement disponibles. Les ignorer, c'est abandonner un outil clé dans la recherche de versions HDMap en ligne fiables.

Lien original : https://mp.weixin.qq.com/s/FMosLZ2VJVRyeCOzKl-GLw
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!