
Maison >Périphériques technologiques >IA >Améliorer les méthodes de planification de trajectoire pour la conduite autonome dans des environnements incertains
Améliorer les méthodes de planification de trajectoire pour la conduite autonome dans des environnements incertains

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-10-06 14:17:031067parcourir
Titre de la thèse : « Méthode de planification de trajectoire pour les véhicules autonomes dans des environnements incertains basée sur un contrôle prédictif amélioré des modèles »
Revue publiée : IEEE Transactions on Intelligent Transportation Systems
Date de publication : avril 2023
Ce qui suit, c'est moi Mes propres notes de lecture d'article sont principalement les parties qui, à mon avis, sont les points clés, pas la traduction du texte intégral. Cet article fait suite à l'article précédent et trie la partie vérification expérimentale de cet article. L'article précédent est le suivant : Ce qui suit sont mes propres notes de lecture d'article, principalement les parties qui, à mon avis, sont les points clés, et non la traduction du texte intégral. Cet article fait suite à l'article précédent et trie la partie vérification expérimentale de cet article. L'article précédent est le suivant :
fhwim : Une méthode de planification de trajectoire basée sur un contrôle prédictif de modèle amélioré pour les véhicules autonomes dans des environnements incertains
https://zhuanlan.zhihu.com/p/658708080
1 Vérification par simulation
.(1) Environnement de simulation
Les outils de co-simulation incluent Prescan, PyCharm, Matlab/Simulink, parmi lesquels Prescan est utilisé pour créer des scènes de trafic simulées, et PyCharm (avec réseau neuronal ou pytorch facilement) est utilisé pour écrire le module de prédiction de fusion , Matlab/Simulink (avec la boîte à outils MPC) est utilisé pour construire le module de planification de trajectoire et réaliser le contrôle du véhicule. L'idée globale de sélection des outils est relativement naturelle et raisonnable. Le contrôle horizontal utilisé pour contrôler cette partie est LQR, et le contrôle vertical utilisé PID, qui est également une méthode de contrôle relativement courante. L'encodeur-décodeur LSTM du module de prédiction de fusion utilise du code open source. L'auteur a déclaré qu'il provenait de la référence [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances, mais j'ai vu que cet article avait été publié en 2011. C'est un peu vieux (où était l'encodeur-décodage LSTM en 2011 ?). Je ne sais pas si l'auteur a modifié le code en fonction de cela.
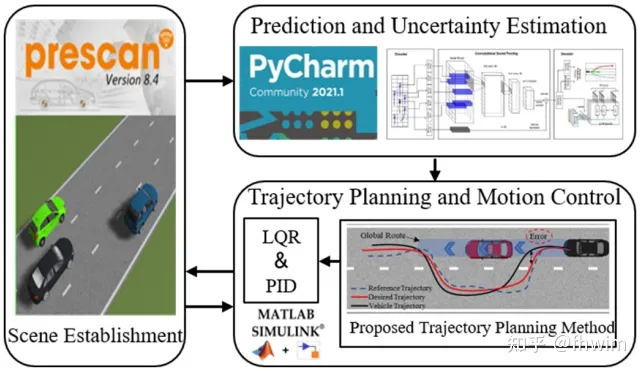
Figure 1 Configuration de l'environnement de simulation
(2) Obtention de l'ensemble MRPI


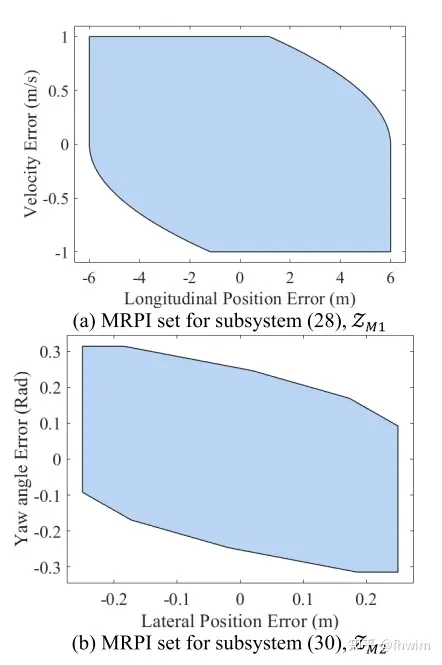
Figure 2 Ensemble MRPI du sous-système
(3) cas 1 : Scène d'obstacle d'évitement
La scène d'évitement d'obstacles statique fait référence à un véhicule d'obstacle à l'arrêt. Le résultat de la planification de la trajectoire est le suivant :
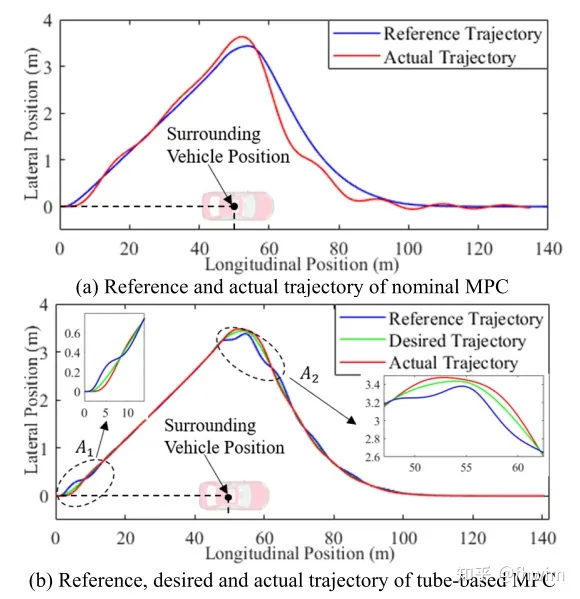
Comparez la méthode MPC générale et la méthode MPC basée sur un pipeline dans la figure 3
Ici, je soupçonne qu'il a une légende. Question, selon l'article précédent, la trajectoire finale de référence s'obtient en additionnant la trajectoire souhaitée et la trajectoire d'ajustement. Parallèlement, lors de l'analyse des résultats, il a également dit que le MPC à base de tube est dans les zones et. dans la figure 3(b). L'erreur est grande Puisque la trajectoire d'ajustement réduit l'erreur, il devrait être conforme à la logique de son article d'échanger les deux légendes de la trajectoire souhaitée et de la trajectoire de référence dans la figure 3(b). b), c'est-à-dire que la ligne verte est la trajectoire de référence finale. La ligne bleue est la trajectoire souhaitée du résultat intermédiaire. Y compris la courbe de vitesse et les courbes d'erreur horizontales et verticales ci-dessous, mais vous pouvez probablement comprendre ce que veut dire l'auteur. La courbe verte dans le MPC à tube est le résultat final, et la courbe bleue est le résultat sans trajectoire d'ajustement.
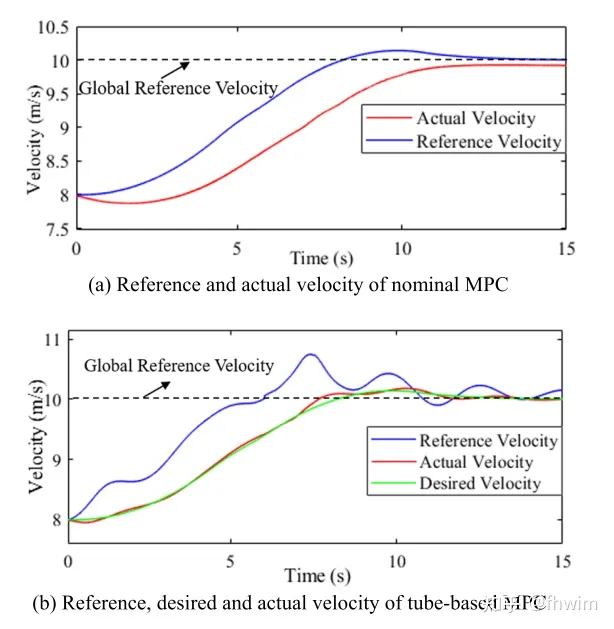
La figure 4 montre la comparaison des changements de vitesse entre la méthode MPC générale et la méthode MPC basée sur un pipeline
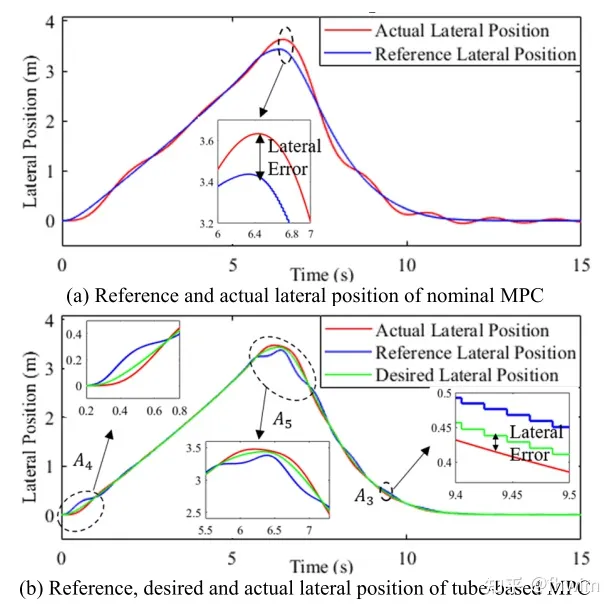
Figure 5 Comparaison des positions latérales
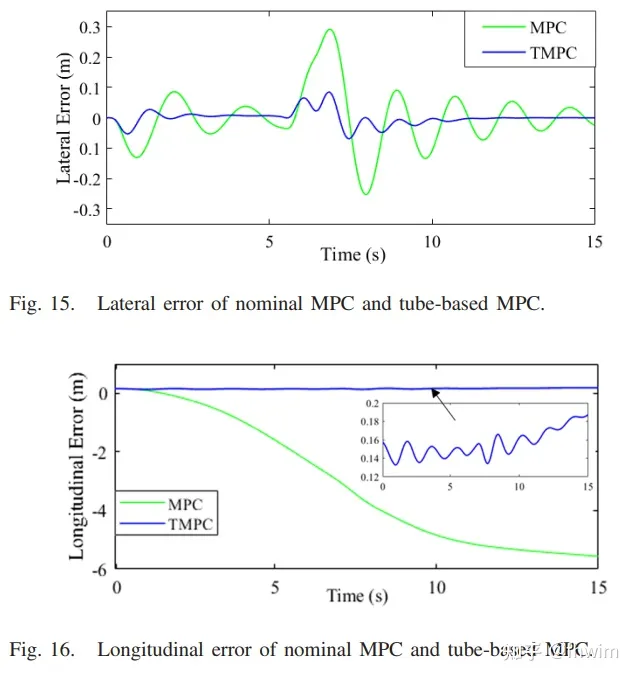
Le contenu qui doit être réécrit est : Comparaison des erreurs horizontales et verticales Figure 6
L'auteur a également comparé la fluidité des changements d'angle du volant, que je n'entrerai pas dans les détails ici. Bref, elle s'est améliorée. Dans le même temps, l'auteur a proposé une base théorique pour le bon effet de l'ajustement de la trajectoire, après l'avoir ajoutée, l'erreur de trajectoire se situe toujours dans l'ensemble MRPI, c'est-à-dire l'écart de suivi du contrôle prédictif du modèle basé sur le tube. (MPC basé sur un tube) est toujours dans l'ensemble MRPI. Le contrôle prédictif du modèle général (MPC) n'a pas de limite dans un environnement incertain, qui peut être très grand
(4) cas 2 : scène d'évitement d'obstacles dynamique
Par rapport à la scène précédente, maintenant la voiture à obstacles commence à bouger. Nous n'entrerons pas dans les détails de la trajectoire globale, des changements de vitesse, des erreurs horizontales et verticales et de la fluidité des changements de volant. Ici, seule une illustration de la trajectoire globale est présentée
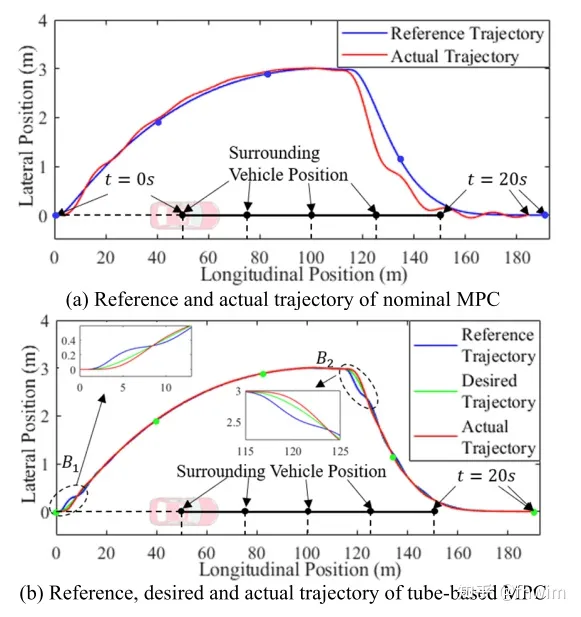
Figure 7 Comparaison de la trajectoire globale entre la méthode MPC générale et la méthode MPC à tube
(5) cas 3 : scène de conduite réelle
Ici, la l'auteur choisit d'utiliser l'ensemble de données NGSIM pour valider votre méthode. Premièrement, les auteurs ont validé la méthode de prédiction de fusion. L'ensemble de données NGSIM contient des données de trajectoire de véhicule, que l'auteur a divisées en trajectoires historiques et trajectoires futures, et a construit un ensemble de formation que l'encodeur-décodeur LSTM doit apprendre. L'auteur a sélectionné 10 000 trajectoires, dont 7 500 ont été utilisées comme ensemble d'entraînement et 2 500 comme ensemble de validation. L'optimiseur prend Adam et fixe le taux d'apprentissage à 0,01. L'effet de prédiction est illustré dans la figure ci-dessous
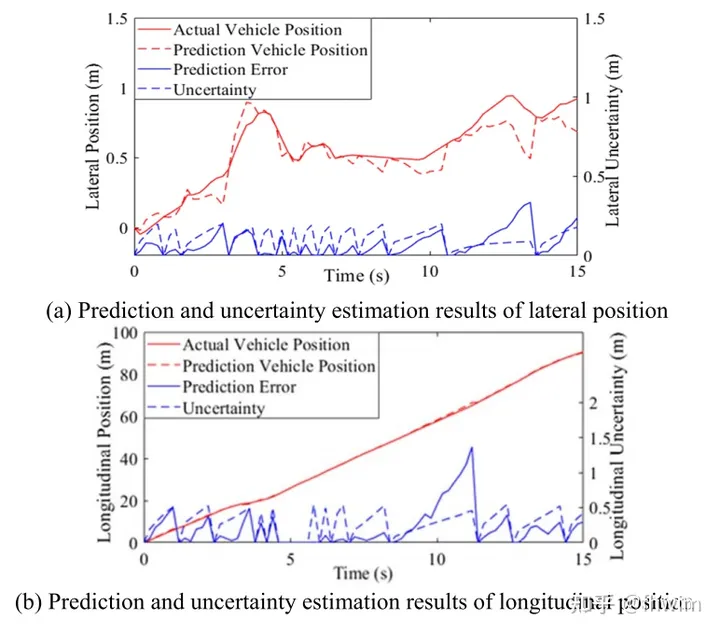
Figure 8 Résultats de la prédiction et de l'incertitude de trajectoire horizontale et verticale
Dans cet article, l'auteur n'a pas utilisé d'indicateurs couramment utilisés dans le domaine de la prédiction de trajectoire, tels que l'ADE, FDE, etc. Je pense que cette approche n'est pas convaincante, mais on peut également comprendre que cet article se concentre sur la planification de trajectoire basée sur un MPC basé sur un tube
Après avoir vérifié la prédiction de trajectoire, une planification de trajectoire a été effectuée pour vérifier davantage le rôle du module de prédiction de trajectoire. . Voici une comparaison. Il y a trois situations :
(a) Quand je connais déjà la véritable trajectoire future de la voiture obstacle, j'effectuerai une planification de trajectoire Cela sert de groupe de contrôle
Quand je ne connais pas l'avenir. trajectoire de la voiture à obstacle, je vais le faire d'abord Prédiction de trajectoire (mais pas calcul de l'incertitude), puis planification de trajectoire
(c) Quand je ne connais pas la trajectoire future de la voiture à obstacle, j'effectue d'abord une prédiction de trajectoire (calcul incertitude), puis planification de la trajectoire
La figure 9 montre les résultats de (a), (b) et (c), correspondant respectivement à la position vraie, aux résultats de prédiction et à la méthode proposée
La méthode proposée est le résultat obtenu par la méthode dans cet article. Vous pouvez voir que la méthode proposée est plus proche de True Position et montre que cette méthode de prédiction de fusion (en particulier le calcul de l'incertitude) est efficace.
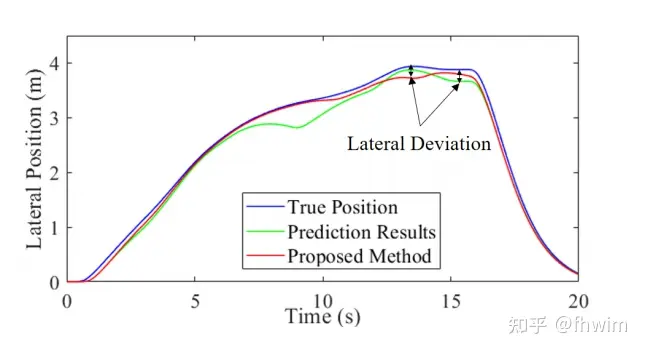
Figure 9 Comparaison de trois méthodes pour vérifier le module de prédiction de trajectoire
Ici vous pouvez trouver que le cas 1 et le cas 2 vérifient la partie planification de trajectoire La partie prédiction de trajectoire devant le contrôle prédictif du modèle général (MPC) et le pipeline. MPC basé sur un pipeline est le même, cette comparaison peut illustrer le rôle du MPC basé sur un pipeline. Le cas 3 consiste à vérifier le module de prédiction de trajectoire. Vous pouvez voir que deux types de vérification ont été effectués. Le premier type consiste à comparer directement la trajectoire prédite et la trajectoire réelle, et le deuxième type consiste d'abord à connaître la trajectoire future/à prédire la trajectoire future (sans calculer l'incertitude)/à prédire la trajectoire future (calculer l'incertitude), puis à effectuer la trajectoire planification. En utilisant la position réelle comme norme, les effets de la méthode de prédiction de trajectoire avec calcul d'incertitude et de la méthode de prédiction de trajectoire sans calcul d'incertitude sont comparés. Les idées de vérification pour ces deux modules sont encore très claires
2. Vérification expérimentale de véhicules réels
Le véhicule utilisé dans l'expérience est montré dans l'image ci-dessous :
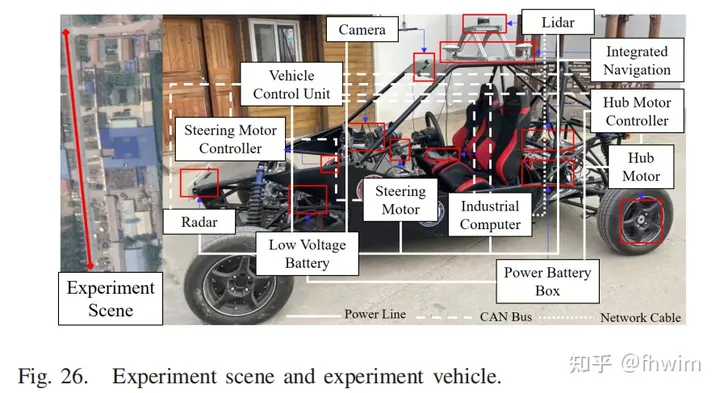
Le contenu qui doit être réécrit est : le véhicule utilisé dans l'expérience Image 10
L'auteur a également fourni les paramètres du véhicule expérimental et les paramètres de l'ordinateur et des capteurs utilisés dans l'expérience :
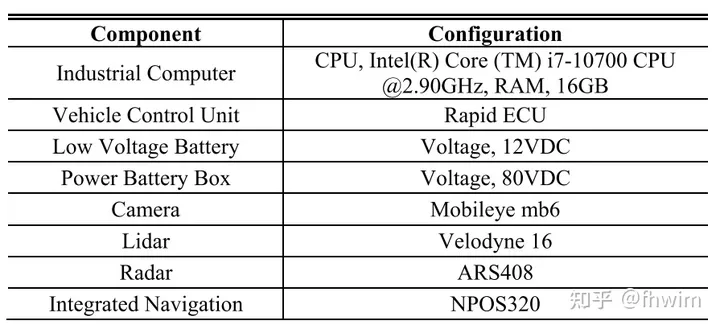
Le contenu qui doit être réécrit est : Figure 11 Le les paramètres de l'ordinateur et des capteurs
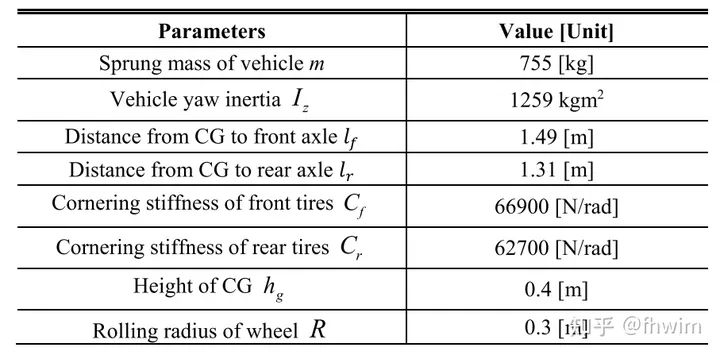
doivent être réécrits Le contenu est : Paramètres du véhicule expérimental, Figure 12
Par souci de sécurité, la scène expérimentale mise en place par l'auteur est la même que le cas d'expérience de simulation 1. Il s'agit d'une scène d'évitement d'obstacles statiques. Il est préférable de comparer la trajectoire globale, les changements de vitesse, les erreurs horizontales et verticales, et la douceur des changements de volant, qui ne sera pas décrite en détail.
3. Résumé de lecture
Tout d'abord, l'idée de l'article concerne le module de prédiction de trajectoire avec calcul d'incertitude et le module de planification de trajectoire basé sur MPC à tube. Parmi eux, le module de planification de trajectoire est le contenu principal. Je suis très satisfait de cette forme modulaire car elle applique véritablement la prédiction de trajectoire à la planification de trajectoire. La sortie de prédiction est utilisée comme entrée de planification, et le module de planification détermine uniquement un seuil de sécurité pour le module de prédiction, et le couplage entre les deux modules est faible. En d'autres termes, le module de prédiction peut être remplacé par d'autres méthodes dans la mesure où il peut fournir les résultats de prédiction de la trajectoire et de l'incertitude de la voiture à obstacles. À l’avenir, des réseaux de neurones plus avancés pourraient être envisagés pour prédire directement les trajectoires et les incertitudes. Dans l'ensemble, le processus de cet algorithme de prédiction de fusion est un peu compliqué, mais je pense que l'idée de l'article est très bonne. Les idées et la charge de travail de simulation et d'essais réels de véhicules sont également satisfaisantes
Deuxièmement, quelques erreurs de bas niveau ont été découvertes lors de la lecture de l'article. Par exemple, dans la partie encodeur-décodeur LSTM, la sortie LSTM est le point de trajectoire de la future étape, qui est également écrit dans la formule, mais dans le texte il est écrit comme .

Figure 13 Quelques erreurs dans la partie codeur-décodeur LSTM
Puis dans la partie expérience de simulation, lors du calcul de l'ensemble MRPI, il est dit que le système (21), c'est-à-dire le système d'erreurs, est divisé en sous-systèmes (32) et (34), mais en fait dans les sous-systèmes (30) et (32), ces petites erreurs n'affectent pas la méthode globale mais affecteront également l'expérience de lecture du lecteur.

Figure 14 Partie d'expérience de simulation MRPI Définir le texte original
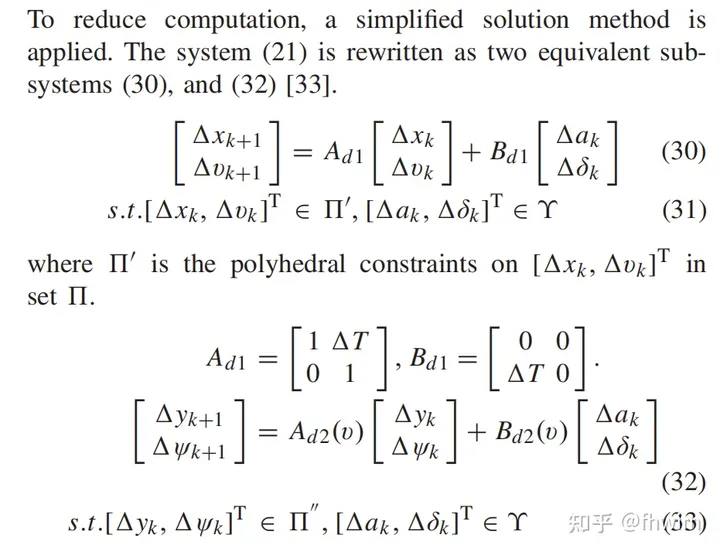
Le système d'erreur de la figure 15 est divisé en sous-systèmes (30) et (32)

Lien du texte original : https://mp .weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment apprendre la technologie PS par vous-même
- À quoi se réfèrent principalement les indicateurs de performance technique informatique ?
- Un article sur l'application de la technologie SLAM à la conduite autonome
- La conduite entièrement autonome de Tesla a heurté un mannequin d'enfant à trois reprises et ne s'est pas arrêtée ni accélérée après la collision
- Que savez-vous de la technologie de navigation inertielle pour la conduite autonome ?