
Maison >Périphériques technologiques >IA >Réaliser la collaboration homme-machine dans l'assemblage de production : assemblage de développement holographique WIMI et technologie de contrôle guidé manuellement basée sur l'interface cerveau-ordinateur
Réaliser la collaboration homme-machine dans l'assemblage de production : assemblage de développement holographique WIMI et technologie de contrôle guidé manuellement basée sur l'interface cerveau-ordinateur

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-09-28 12:21:05629parcourir
Dans la fabrication moderne, l'innovation continue et le développement technologique ont apporté de nouvelles possibilités au processus de production. Ces dernières années, les robots collaboratifs (Cobots), en tant que machines compactes, peuvent non seulement effectuer diverses tâches, mais également travailler en collaboration avec des opérateurs humains pour améliorer efficacement l'efficacité de la production. Compte tenu des caractéristiques des petites et moyennes entreprises avec de petits lots de production et des tâches nombreuses et complexes, WIMI a développé une solution révolutionnaire de « technologie d'assemblage basée sur l'interface cerveau-ordinateur et de contrôle guidé manuellement », qui ouvre de nouvelles perspectives à le domaine de la production.
Les processus de production traditionnels nécessitent souvent que les opérateurs investissent beaucoup de force physique et d'énergie, en particulier dans des environnements comportant des tâches complexes et une répétabilité élevée, ce qui peut facilement entraîner une fatigue de l'opérateur et une augmentation des erreurs. L'introduction de robots collaboratifs a apporté de nouvelles opportunités aux entreprises. Les robots collaboratifs, avec leur taille compacte et leurs fonctionnalités programmables, peuvent effectuer diverses tâches, réduire la charge de travail de l'opérateur et améliorer l'efficacité de la production. L’introduction de cette technologie constituera un avantage concurrentiel important, en particulier pour les petites et moyennes entreprises.Afin de parvenir à une communication et une coopération efficaces entre les humains et les robots collaboratifs, une question clé est de savoir comment concevoir des tâches et des stratégies d'interaction appropriées. Afin de résoudre ce problème, WIMI Hologram a proposé une stratégie basée sur une interface cerveau-ordinateur, qui réalise le contrôle des commandes de robots collaboratifs par l'opérateur grâce à la technologie d'interface cerveau-ordinateur.
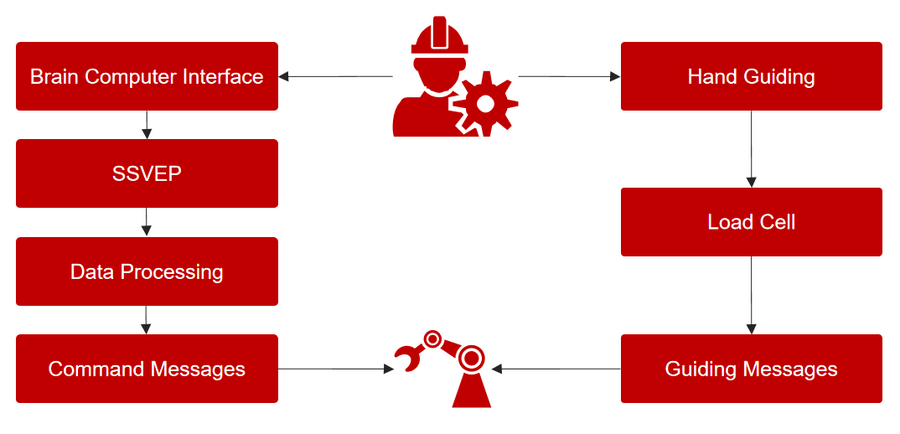
La technologie holographique de WIMI réalise un assemblage et un contrôle manuel basés sur l'interface cerveau-ordinateur, jouant un rôle clé dans la technologie d'interface cerveau-ordinateur. L'interface cerveau-ordinateur (BCI) est une technologie qui détecte l'activité cérébrale et la convertit en instructions qu'un ordinateur peut comprendre. Dans cette technologie, l'opérateur est capable d'envoyer des commandes au robot collaboratif via la méthode des potentiels évoqués visuels en régime permanent (SSVEP). Cette approche permet aux opérateurs de changer de mode de mission sans utiliser leurs mains. De plus, cette technologie introduit également un contrôle de guidage manuel. En installant un capteur de force à six composants sur le poignet du robot collaboratif, un contrôle guidé manuellement du robot collaboratif est obtenu.
Dans l'ensemble du processus de production et d'assemblage, la commutation des tâches et la synchronisation des phases sont cruciales. La technologie d'assemblage basée sur l'interface cerveau-ordinateur et de contrôle guidé manuellement de WIMI divise le processus de collaboration en étapes indépendantes et en étapes de support. Dans la phase indépendante, le robot et l'opérateur travaillent dans un scénario commun pour accomplir diverses tâches différentes. Une fois que l'opérateur a besoin de l'aide du robot, il peut passer à l'étape d'assistance pour réaliser une opération collaborative homme-machine. Cette commutation est réalisée par l'opérateur envoyant un message de commande dans l'interface cerveau-ordinateur, informant ainsi le robot de son intention de basculer à l'avance
De plus, la technologie d'assemblage et de contrôle guidé manuellement de l'interface cerveau-ordinateur holographique WIMI présente un cadre complet d'applications pratiques. Les opérateurs peuvent interagir avec le robot collaboratif via une interface. En termes d'activités liées à l'interface cerveau-ordinateur, l'opérateur réalise le contrôle des commandes du robot en observant des images. Ces commandes sont référencées au contrôleur du robot après avoir été collectées et traitées par les électrodes. D'autre part, avec le contrôle de guidage manuel, l'opérateur peut guider le robot grâce à des capteurs situés sur le poignet du robot. Le déroulement de l'ensemble du processus d'assemblage dépend de sous-tâches robotisées préprogrammées et de commandes en temps réel émises par l'opérateur
 L’ensemble du processus depuis l’intention de l’opérateur jusqu’à l’action réelle du robot collaboratif. Ce processus implique de multiples liens et technologies pour garantir que les intentions de l'opérateur peuvent être converties avec précision en comportement du robot, permettant ainsi une opération collaborative homme-machine efficace.
L’ensemble du processus depuis l’intention de l’opérateur jusqu’à l’action réelle du robot collaboratif. Ce processus implique de multiples liens et technologies pour garantir que les intentions de l'opérateur peuvent être converties avec précision en comportement du robot, permettant ainsi une opération collaborative homme-machine efficace.
Application de la technologie d'interface cerveau-ordinateur (BCI) : La technologie d'interface cerveau-ordinateur est au cœur du parcours technique. Dans cette technologie, l'activité cérébrale de l'opérateur est capturée et convertie en instructions que l'ordinateur peut comprendre, contrôlant ainsi le robot collaboratif. Dans la technologie d'assemblage et de contrôle guidé par la main basée sur l'interface cerveau-ordinateur de WIMI, l'application de la technologie d'interface cerveau-ordinateur permet d'obtenir des intentions de commutation pour différents modes de tâche grâce à la méthode du potentiel évoqué visuel en régime permanent (SSVEP)
Collecte et traitement des données : La première étape du parcours technique consiste à collecter et traiter des données sur l'activité cérébrale de l'opérateur. Cela nécessite de placer des électrodes d'électroencéphalogramme (EEG) sur la tête de l'opérateur pour capter les signaux électriques produits par le cerveau. Ces signaux électriques seront transmis à un ordinateur pour traitement afin d’en extraire des informations sur les intentions de l’opérateur
Génération et livraison de commandes : en analysant les signaux électriques générés par le cerveau de l'opérateur, l'ordinateur peut générer les commandes correspondantes. Ces commandes représentent l'intention de l'opérateur de changer de mode de mission. Ces commandes doivent être transmises au système de contrôle du robot collaboratif pour contrôler le comportement du robot.
Application de la technologie de contrôle de guidage manuel : dans une autre branche de ce domaine technologique, la technologie de contrôle de guidage manuel est appliquée pour obtenir un contrôle plus précis. Le robot collaboratif est mis en œuvre à l'aide d'un capteur de force à six composants. Le capteur peut détecter la force de guidage de la main de l'opérateur et transmettre cette information au système de contrôle du robot
Contrôle et exécution : les commandes générées par la technologie d'interface cerveau-ordinateur et les informations transmises par la technologie de contrôle de guidage manuel sont finalement exécutées par le système de contrôle du robot. Le robot bascule entre différents modes de tâche en fonction des intentions de l'opérateur, opérant ainsi de manière collaborative à différentes étapes.
Contenu réécrit : retour d'information et synchronisation : la dernière étape du parcours d'affichage technique implique le retour d'information et la synchronisation. Une fois que le robot effectue l'action correspondante, des informations de retour d'information peuvent être transmises à l'opérateur pour garantir que celui-ci comprend le comportement et l'état du robot. Cela aide les opérateurs à ajuster davantage leur communication d'intention, ce qui se traduit par une meilleure collaboration homme-machine
Chaque aspect de la technologie holographique WIMI nécessite une définition de la division du travail et une mise en œuvre pour garantir un fonctionnement collaboratif homme-machine efficace et précis. Le développement réussi de cette technologie innovante a apporté de nouvelles possibilités à la fabrication moderne, qui amélioreront l'efficacité de la production, réduiront la charge de travail des opérateurs et joueront un rôle positif dans les petites et moyennes entreprises
De toute évidence, la « technologie d'assemblage basée sur l'interface cerveau-ordinateur et de contrôle guidé manuellement » de WIMI Hologram a offert des opportunités sans précédent aux petites et moyennes entreprises. En combinant la technologie d'interface cerveau-ordinateur et la technologie de contrôle guidé manuellement, les opérateurs peuvent y parvenir. améliore considérablement l'efficacité et la qualité du processus de production, réduit la charge de travail de l'opérateur et réduit le taux d'erreur, marquant ainsi une nouvelle étape dans la fabrication moderne.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Monkey apprend à taper avec ses pensées, dernière démonstration d'Elon Musk sur l'interface cerveau-ordinateur, essais sur l'homme attendus d'ici 6 mois
- ChatGPT relie l'interface cerveau-ordinateur et utilise les ondes cérébrales pour répondre aux e-mails. La science-fiction est devenue réalité.
- L'interface cerveau-ordinateur est à l'avant-garde, est-ce un concept à la mode ? Ou est-ce vraiment vrai ?
- Neuralink, société d'interface cerveau-ordinateur, commence à recruter des patients pour des essais cliniques et mènera des essais sur des humains
- « Le père de l'interface cerveau-ordinateur » apparaît dans Xuhui !