
Maison >Java >javaDidacticiel >Implémentation de la transformation de ligne OpenCV Hough à l'aide de Java
Implémentation de la transformation de ligne OpenCV Hough à l'aide de Java

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-09-14 11:53:011039parcourir
Vous pouvez utiliser la transformation de ligne de Hough pour détecter des lignes droites dans une image donnée. Il existe deux méthodes de transformation de ligne de Hough disponibles dans OpenCV, à savoir la transformation de ligne de Hough standard et la transformation de ligne probabiliste de Hough.
Vous pouvez appliquer la transformation standard des lignes de Hough en utilisant la méthode HoughLines() de la classe Imgproc. La méthode accepte les paramètres suivants :
Deux objets Mat représentant l'image source et un vecteur stockant les paramètres de ligne (r, Φ).
représente deux variables doubles représentant la résolution des paramètres r (pixels) et Φ (radians).
Un entier représentant le nombre minimum d'intersections requises pour "détecter" une ligne.
Vous pouvez appliquer la Transformation probabiliste de ligne de Hough en utilisant la méthode HoughLinesP() de la classe Imgproc (mêmes paramètres).
Vous pouvez détecter les bords d'une image donnée en utilisant la méthode Canny() de la classe Imgproc. La méthode accepte les paramètres suivants :
Deux objets Mat représentant l'image source et l'image cible.
Deux variables doubles utilisées pour enregistrer la valeur seuil.
Pour détecter les bords d'une image donnée à l'aide du détecteur de bords Canny, suivez ces étapes :
Lisez le contenu de l'image source à l'aide de la méthode imread() de la classe Imgcodecs.
Convertissez-la en image en niveaux de gris à l'aide de la méthode cvtColor() de la classe Imgproc.
Utilisez la méthode blur() de la classe Imgproc pour flouter l'image résultante (en niveaux de gris) avec une valeur de noyau de 3.
Appliquez l'algorithme de détection des bords Canny sur l'image floue à l'aide de la méthode canny() d'Imgproc.
Créez une matrice vide avec toutes les valeurs 0.
Utilisez la méthode copyTo() de la classe Mat pour y ajouter les arêtes détectées.
Exemple
import java.awt.Image;
import java.awt.image.BufferedImage;
import java.io.IOException;
import javafx.application.Application;
import javafx.embed.swing.SwingFXUtils;
import javafx.scene.Group;
import javafx.scene.Scene;
import javafx.scene.image.ImageView;
import javafx.scene.image.WritableImage;
import javafx.stage.Stage;
import org.opencv.core.Core;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Point;
import org.opencv.core.Scalar;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
public class HoughLineTransform extends Application {
public void start(Stage stage) throws IOException {
//Loading the OpenCV core library
System.loadLibrary( Core.NATIVE_LIBRARY_NAME );
String file ="D:\Images\road4.jpg";
Mat src = Imgcodecs.imread(file);
//Converting the image to Gray
Mat gray = new Mat();
Imgproc.cvtColor(src, gray, Imgproc.COLOR_RGBA2GRAY);
//Detecting the edges
Mat edges = new Mat();
Imgproc.Canny(gray, edges, 60, 60*3, 3, false);
// Changing the color of the canny
Mat cannyColor = new Mat();
Imgproc.cvtColor(edges, cannyColor, Imgproc.COLOR_GRAY2BGR);
//Detecting the hough lines from (canny)
Mat lines = new Mat();
Imgproc.HoughLines(edges, lines, 1, Math.PI/180, 150);
for (int i = 0; i < lines.rows(); i++) {
double[] data = lines.get(i, 0);
double rho = data[0];
double theta = data[1];
double a = Math.cos(theta);
double b = Math.sin(theta);
double x0 = a*rho;
double y0 = b*rho;
//Drawing lines on the image
Point pt1 = new Point();
Point pt2 = new Point();
pt1.x = Math.round(x0 + 1000*(-b));
pt1.y = Math.round(y0 + 1000*(a));
pt2.x = Math.round(x0 - 1000*(-b));
pt2.y = Math.round(y0 - 1000 *(a));
Imgproc.line(cannyColor, pt1, pt2, new Scalar(0, 0, 255), 3);
}
//Converting matrix to JavaFX writable image
Image img = HighGui.toBufferedImage(cannyColor);
WritableImage writableImage= SwingFXUtils.toFXImage((BufferedImage) img, null);
//Setting the image view
ImageView imageView = new ImageView(writableImage);
imageView.setX(10);
imageView.setY(10);
imageView.setFitWidth(575);
imageView.setPreserveRatio(true);
//Setting the Scene object
Group root = new Group(imageView);
Scene scene = new Scene(root, 595, 400);
stage.setTitle("Hough Line Transform");
stage.setScene(scene);
stage.show();
}
public static void main(String args[]) {
launch(args);
}
}Input image

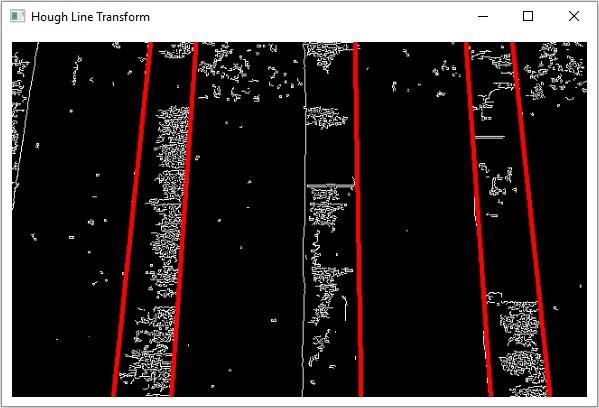
Output
Après l'exécution, le code ci-dessus produit la sortie suivante −
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!