
Maison >Périphériques technologiques >IA >Ce robot publié dans Nature Communications crée la possibilité pour les Transformers de devenir réalité
Ce robot publié dans Nature Communications crée la possibilité pour les Transformers de devenir réalité

- 王林avant
- 2023-07-15 15:05:201574parcourir
Existe-t-il un nouveau mode de transport qui puisse résoudre le mode de déplacement « les gens suivent le troupeau » aux heures de pointe et résoudre complètement le problème des embouteillages ?
Beaucoup de gens ont dû réfléchir à ce problème lorsqu'ils rencontraient des « embouteillages » ou des « foules ». Transformer les voitures en Transformers et transcender les véhicules peut être l'idée de la plupart des gens.

Récemment, "Nature Communications" a publié un M4 (Robot transformateur mobile multimodal Morphobot) qui correspond très bien aux fantasmes des gens sur les transports du futur.

Il est rapporté que M4 a été développé conjointement par le California Institute of Technology et la Northeastern University aux États-Unis, dans le but de produire un robot doté d'une large amplitude de plasticité de mouvement dans un environnement multi-matrice non structuré. Le robot a une mobilité extraordinaire et a la possibilité d'effectuer des mouvements transfrontaliers composites multimodaux à l'avenir.
De nombreuses conceptions de robots humains sont inspirées de la bionique animale. Dans la nature, les animaux aquatiques tels que les tortues de mer et les lions de mer utilisent leurs nageoires antérieures pour nager, et ils peuvent également utiliser leurs nageoires antérieures pour supporter leur poids et marcher sur le sol comme les suricates utilisent leurs quatre membres pour courir et marcher. et ils peuvent également se tenir sur leurs pattes arrière pour explorer leur environnement ; les jeunes faisans musqués utilisent leurs ailes pour voler et peuvent également utiliser leurs ailes pour grimper des pentes verticales ou abruptes comme refuge.
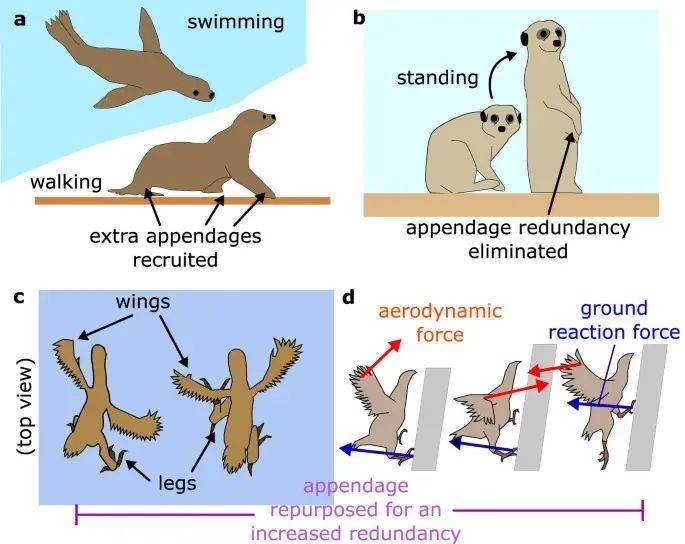
Les nageoires du lion de mer aident à la marche b Les membres postérieurs de la mangouste aident à la reconnaissance c Le poussin faisan utilise ses ailes pour aider au mouvement quadrupède d Les ailes de l'oiseau Chukar aident à la marche inclinable
Une équipe conjointe du California Institute of Technology et de la Northeastern University s'est également inspirée de ces animaux dotés d'une plasticité motrice considérable, et en référence à l'utilisation par ces animaux de leurs structures morphologiques et fonctionnelles pour réutiliser leurs appendices, ils ont créé un dispositif qui « peut être créé en cas de besoin" ou éliminer) les redondances et obtenir un avantage mobile".
Dans le même temps, l'équipe R&D a également mis en œuvre cette idée sur le robot M4, permettant aux 4 pattes du robot M4 d'effectuer des opérations redondantes par déformation pour maximiser la plasticité du mouvement.
En se réajustant, les quatre pattes du M4 peuvent prendre plusieurs formes différentes :
Quatre pattes pour la locomotion quadrupède
lQuatre propulseurs pour le vol
lDeux hélices + deux roues pour WAIR sur pentes à 45 degrés
lDeux hélices + deux roues pour franchir de gros obstacles
lDeux roues + deux mains pour le contrôle de la moto
Les deux roues du MIP
lUGV quatre roues
Quatre roues pour s'accroupir
Les fixations au bas du châssis peuvent être réajustées en roues, pieds ou hélices. La réalisation de cette conception modulaire fournit des conditions importantes pour améliorer les performances du M4.
Lorsque le M4 doit reposer sur deux roues, deux des quatre roues se replient et ses hélices intégrées tournent vers le haut pour assurer l'équilibre du robot.
Lorsque le M4 doit voler, les quatre roues se replient et les hélices soulèvent le robot du sol.
Le robot M4 vole via quatre rotors à l'intérieur de ses roues inclinables
La conception commune sur l'ensemble de roues permet également au M4 d'effectuer des mouvements de marche.
C’est juste que dans l’itération actuelle du M4, l’action de marche est principalement une preuve de concept. À l’avenir, la génération M4 devrait avoir la capacité de traverser efficacement des terrains complexes sur lesquels il est difficile de marcher, ce qui est difficile à réaliser pour les robots marcheurs.
Le robot M4 passe du mode conduite au mode marche
Il est entendu que les postures de mouvement du M4 comprennent 8 types différents de vol, roulage, rampement, accroupissement, équilibre, culbute, reconnaissance et opération locale. Il peut effectuer divers modes de mouvement à l'aide d'opérations redondantes réutilisées par les appendices. En réutilisant les appendices avec un fuselage morphing et des hélices carénées commutables, le M4 peut passer à un véhicule terrestre sans pilote (UGV), un pendule inversé mobile (MIP), un système aérien sans pilote (UAS), un MIP assisté par propulseur, une locomotion des jambes et une manœuvre de moto MIP. mode.
En plus de son excellente mobilité, l'équipe R&D de M4 a également ajouté une intelligence artificielle qui lui donne une « âme », combinant la flexibilité de mouvement du robot avec l'intelligence artificielle, permettant à M4 de choisir indépendamment le mouvement le plus efficace en fonction de la forme du terrain à venir.
Par exemple, dans un environnement inconnu, M4 démarrera d'abord dans le mode de roulement à quatre roues le plus économe en énergie. Lorsqu'il rencontre des obstacles tels que des rochers, le M4 passe en mode debout et effectue un balayage polyvalent de la zone à des fins d'enquête aérienne et de reconnaissance à l'aide de capteurs intégrés, fournissant ainsi une connaissance stratégique de la situation.
Lorsqu'il rencontre un canyon ou un autre élément qu'un robot à roues ne peut pas traverser, le M4 reconfigurera ses roues en rotors, traversera le canyon de l'autre côté, puis continuera à rouler.
Interrogé sur son point de vue sur le robot transformateur mobile multimodal M4 développé conjointement par Caltech et la Northeastern University, le professeur Hans W. Lipman, directeur du Centre pour les systèmes et technologies autonomes (CAST) à Caltech, le professeur Mory Mory Gharib (Ph .D. 1983) a déclaré : « Les performances transcendantes actuelles du M4 offrent davantage de possibilités d'expansion de ses domaines d'application. En plus du sauvetage d'urgence, le M4 peut également être utilisé dans la recherche, l'exploration spatiale et les packages automatiques dans les espaces résidentiels. des domaines tels que la transformation et l’agriculture numérique jouent un rôle plus important.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI