
Maison >Périphériques technologiques >IA >Top numéro publié ! L'équipe du professeur Li Yibin de l'Université du Shandong a développé un robot composite à pattes de roue simple et très maniable
Top numéro publié ! L'équipe du professeur Li Yibin de l'Université du Shandong a développé un robot composite à pattes de roue simple et très maniable

- 王林avant
- 2023-06-08 10:15:511584parcourir
Les êtres humains rêvent depuis l’Antiquité de développer des mécanismes mobiles capables de s’adapter à une variété de terrains sauvages. Plate-forme mobile à rouesa une bonne stabilité de mouvement et une bonne efficacité de mouvement, mais il est difficile de voyager sur un terrain accidenté ; Robot à pattes et à pattesa une bonne adaptabilité au terrain et une bonne flexibilité de mouvement, mais sa stabilité de mouvement et son efficacité énergétique doivent être améliorées.
Afin de combiner les avantages du mouvement de la roue et du mouvement des jambes et des pieds, le mécanisme de mouvement composé roue-jambe est né. Les mécanismes composites courants de roues et de jambes comprennent principalement des roues de forme spéciale (telles que RHex), des roues à rayons (telles que Whegs), des roues déformées (telles que OmniWheg), des jambes de roue en série (telles que Wheeled-ANYmal), etc. comme le montre la figure X.
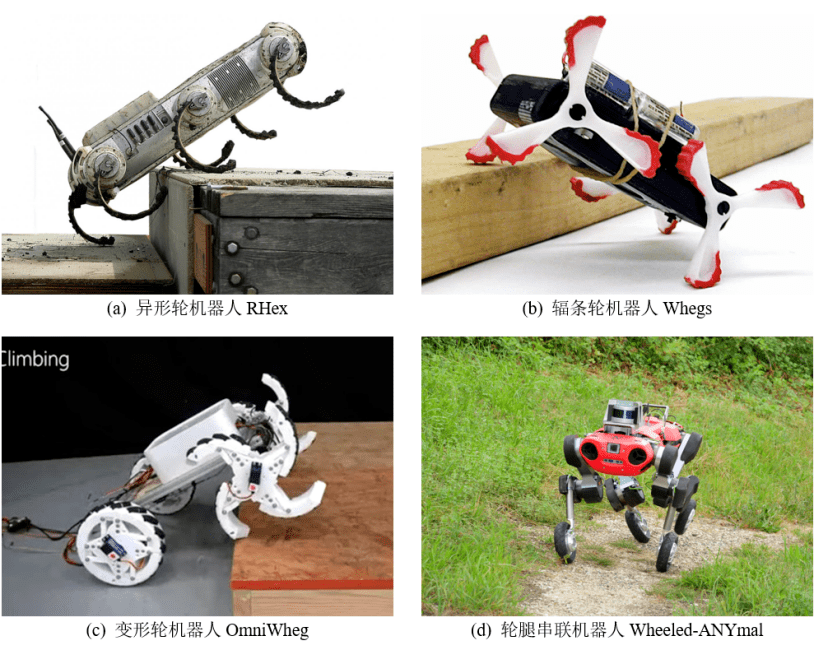
Figure 1 Robot composite commun à pattes de roue
Récemment, l'équipe du professeur Li Yibin de l'Université du Shandong, du professeur Ma Shugen de l'Université Ritsumeikan, Japon, du professeur Liu Jinguo de l'Institut d'automatisation de Shenyang, Académie chinoise des sciences, et du chercheur associé Kong Lingyu du laboratoire Zhijiang, a développé un nouveau type d'un robot composite à pattes de roue, nommé Q-Whex,Comme le montre la figure 2.
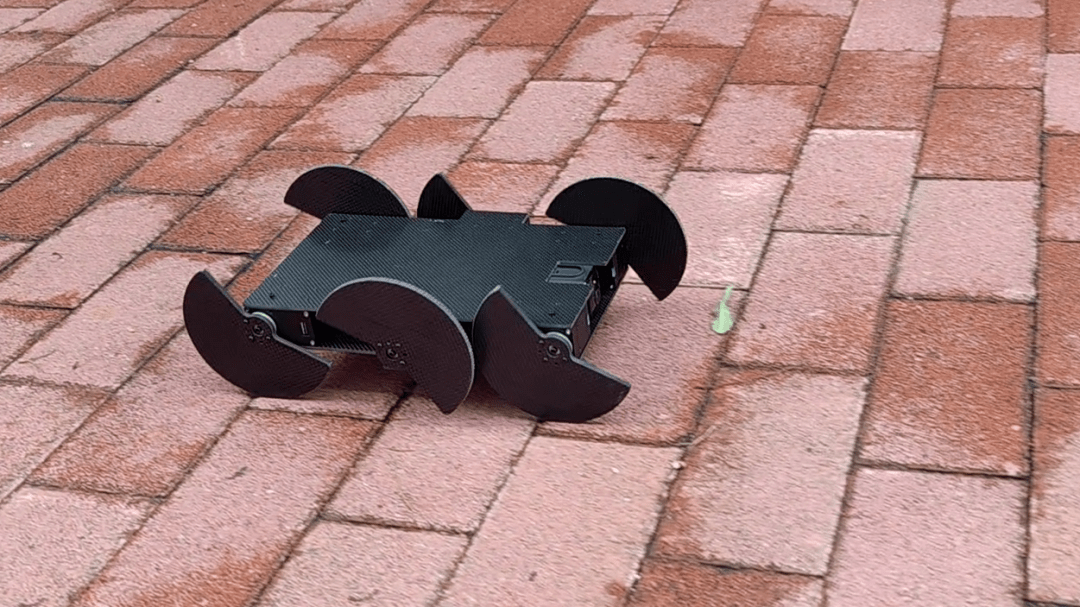
Photo 2 Robot Q-Whex
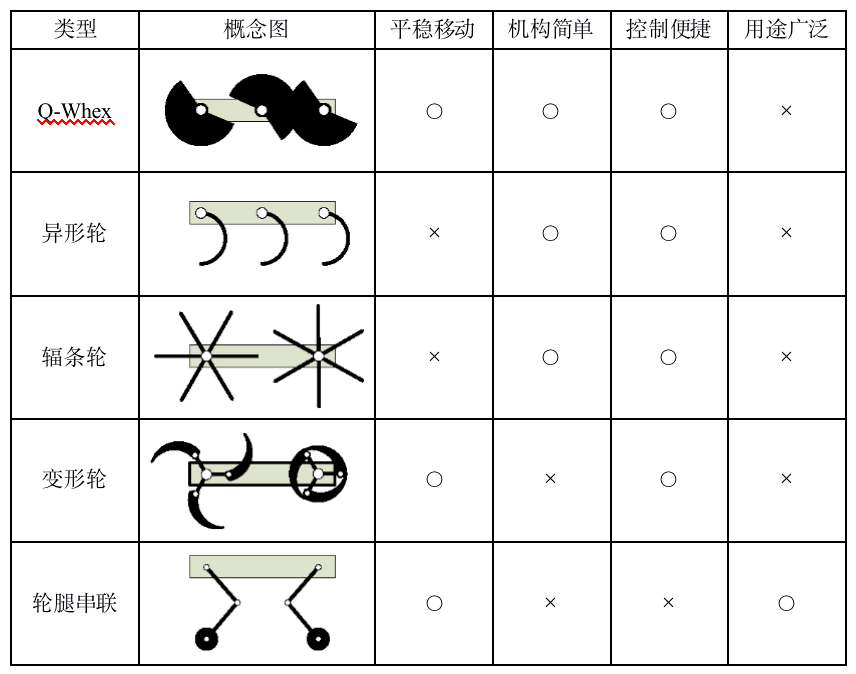
Q-Whex peut se déplacer en douceur sur un sol plat comme une plate-forme mobile à roues, et peut également franchir des obstacles plus hauts que la hauteur de son châssis comme un robot à pieds. Comparé à d'autres robots mobiles composites à pattes de roue, Q-Whex présente des avantages en termes de fluidité de mouvement, de complexité de mécanisme et de difficulté de contrôle, comme le montre le tableau 1.
Tableau 1 Comparaison entre Q-Whex et d'autres types de robots mobiles composites à pattes de roue
Ce travail a été publié dans le Journal of Field Robotics sous le titre « Q-Whex : A simple and very mobile quasi-wheeled hexapod robot ».
▍Mécanisme simple et contrôle pratique
Le robot Q-Whex présenté dans le document mesure 277,5 mm de long, 204,8 mm de large, 39,5 mm de haut, a un poids mort de 2,4 kg et peut atteindre une vitesse d'avancement de 0,44 m/s avec une charge de 2,65 kg. Q-Whex se compose d'un corps principal et de six systèmes de transmission à demi-roues isomorphes en forme de secteur. Le circuit de commande, l'IMU, la batterie et la caméra sont intégrés à l'intérieur du torse. Le moteur d'entraînement de la structure des pattes de roue est également placé à l'intérieur du torse. Chaque demi-roue a une structure en forme d'éventail à 210° et l'arbre de sortie du moteur. est connecté au centre du ventilateur pour obtenir une rotation. Lorsque le bord en forme d'éventail touche le sol, il s'agit d'un mouvement de roue. Lorsque le bord en forme d'éventail touche le sol, l'effet de dépassement d'obstacle de type jambe peut être obtenu.
La production et l'assemblage de Q-Whex sont très simples, comme le montre la figure 3. Les composants à l'intérieur du moteur et du torse sont installés entre deux plaques en fibre de carbone, et chaque demi-roue de secteur est également constituée de plaques en fibre de carbone.

Figure 3 Q-Whex vue éclatée
Le contrôle du mouvement de Q-Whex est également très simple. Chaque demi-roue en forme de secteur tourne en continu. La direction peut être obtenue en contrôlant la différence de vitesse entre la demi-roue en forme de secteur gauche et la demi-roue en forme de secteur droit. du robot. En contrôlant l'angle de rotation entre chaque demi-roue en forme de secteur, la différence de phase peut générer des allures différentes. La figure 4 montre les quatre allures typiques de Q-Whex.
Figure 4 Affichage de la démarche typique de Q-Whex
▍Combinaison roue et jambe, grimper et surmonter les obstacles
Q-Whex adopte une démarche triangulaire et peut se déplacer en douceur sur un sol plat comme une plate-forme mobile à roues, comme le montre la figure 5.

Figure 5 Q-Whex se déplace en douceur sur un terrain plat
Q-Whex peut également facilement gérer la neige, la glace, le gravier et d'autres surfaces, comme le montre la figure 6.

Figure 6 Q-Whex fonctionne sur une variété de surfaces
En utilisant une démarche symétrique, vous pouvez monter et descendre une pente de 32 degrés, comme le montre la figure 7.

Figure 7 Q-Whex sur une pente de 32 degrés
Peut monter des marches continues, comme le montre la figure 8.
Image 8 Marches continues d'escalade Q-Whex
Différents terrains accidentés ne posent pas de problème, comme le montre la figure 9.
Figure 9 Q-Whex fonctionnant sur un terrain accidenté
▍Configuration symétrique, aucune crainte de renversement
Étant donné que la conception structurelle du robot Q-Whex adopte une configuration symétrique dans les trois directions avant et arrière, gauche et droite, et haut et bas, il n'y a aucune différence entre l'avant et l'arrière et l'avant et l'arrière lors de son mouvement. Lorsque le robot se renverse accidentellement pendant la conduite, il peut continuer à avancer dans la configuration « à l'envers », bénéficiant ainsi d'une excellente assurance et d'une excellente tolérance aux pannes pour les risques et les accidents dans les mouvements dans un environnement complexe. La figure 10 montre que le robot s'est renversé pendant le processus d'ascension, puis a terminé l'ascension dans une posture de « secours ».
Image 10 Q-Whex peut continuer à rouler après un retournement
▍Caméra embarquée, détection à distance
Un petit équipement caméra a été installé sur le robot Q-Whex et peut transmettre les images collectées à l'opérateur distant en temps réel via WiFi ou réseau 4G. Par conséquent, Q-Whex peut effectuer des tâches de détection sans pilote, comme le montre la figure 11.
Figure 11 Q-Whex peut utiliser des caméras embarquées pour la détection à distance
Vous pouvez également taquiner le chat à distance, comme le montre la figure 12.
Image 12 Q-Whex et chat
Q-Whex est essentiellement un nouveau concept de mobilité composite roue-jambe. Sa grande maniabilité et sa forte praticabilité sont dérivées de la rotation continue et de la coordination de phase mutuelle de six demi-roues en forme de secteur entraînées indépendamment. Ce concept peut être appliqué aux plates-formes mobiles nécessaires aux inspections industrielles, au transport logistique, à la détection sur le terrain, etc. La configuration et la taille appropriées doivent être sélectionnées en fonction des exigences réelles de l'application. Le robot n'a pas besoin d'adopter des stratégies complexes de perception ou de contrôle, et sa simplicité de structure et de contrôle améliore la robustesse et la fiabilité du système.
Le premier auteur de l'article est le chercheur associé Zhang Guoteng de l'Université du Shandong, email :
guoteng@email.sdu.edu.cn.
Lien papier :
https://doi.org/10.1002/rob.22186
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI