
Maison >Périphériques technologiques >IA >Lorsqu'aucune personne réelle ne peut vous faire un câlin sincère, le robot passe à l'action
Lorsqu'aucune personne réelle ne peut vous faire un câlin sincère, le robot passe à l'action

- 王林avant
- 2023-06-03 15:07:281097parcourir
Tout le monde a des moments emo, mais tout le monde ne peut pas trouver quelqu'un pour les serrer dans ses bras.
Ce point douloureux a également été observé par le scientifique Alexis Block (ci-après dénommé Block). Depuis 2017, elle étudie comment apprendre aux robots à faire des câlins. Elle est ensuite devenue membre de la célèbre « école Max Planck » allemande, qui a produit 37 lauréats du prix Nobel.
Ce projet n'est pas si simple. Parce qu'ils fabriquent ce robot depuis 6 ans, il ne fait pas froid, est très humain :
- Lorsque les gens l'approchent, il lève les bras et demande avec enthousiasme : « Puis-je avoir un câlin ? » ;
- Il s'ajustera en fonction de la taille de la personne pour donner un câlin parfait. Il peut également ajuster différentes forces de « compression » pour rendre le câlin plus affectueux. Il peut aussi réagir à différentes postures d'étreinte : par exemple, si les gens veulent tenir un moment, il le comprendra, plutôt que de lâcher son bras robotique d'avance...
C'est tellement réel que les personnes qui ont participé aux expériences préliminaires n'étaient même pas disposées à l'appeler « ça ».
Ce qui est encore plus étonnant, c'est que lorsque tout le monde parlait de la sensation d'être étreint par le robot, ils avaient tous des réponses spécifiques, telles que "faire un câlin à un amant", "un câlin réconfortant d'une mère", et l'autre personne Cela semblait être un "enterrement", "un parent éloigné sur Internet", "un ami rencontré lors d'un match de football", certains disaient même que c'était comme "faire un câlin à un ex".Cette différence dans la correspondance émotionnelle est liée à l'état psychologique des personnes à ce moment-là, ainsi qu'aux actions et à l'étendue de l'étreinte du robot à leur égard à chaque essai.

Pourquoi l'Institut Max Planck apprend-il aux robots à faire des câlins ?
L'être humain est avide de contact peau à peau.
Depuis que nos parents nous ont recueillis dès l'enfance, les gens ont commencé à avoir des contacts étroits avec les autres. Lorsque nous sommes caressés, étreints et massés, des hormones sont libérées, ce qui peut grandement soulager le stress et l'anxiété et réduire la fréquence cardiaque. et la tension artérielle.
Surtout, un câlin serré qui dure plus de trois secondes augmentera le plaisir du contact avec la peau des gens. C'est aussi ce qu'on appelle le « toucher par pression profonde ».
Les gens "devraient s'embrasser 4 fois par jour pour survivre, et les serrer dans leurs bras au moins 8 fois pour être en bonne santé physique et mentale." Virginia Satir, une psychothérapeute américaine bien connue, a proposé la théorie des "Quatre câlins".
Mais vous savez, il n'y a pas toujours quelqu'un qui peut vous accompagner tout le temps, vous pouvez donc réaliser un « toucher de pression profonde » par vous-même en vous enveloppant étroitement dans une couette.
Les gens espèrent que la technologie pourra combler le manque de camaraderie et de confort.
Par exemple, une équipe a réalisé un bracelet électronique capable de recevoir des informations tactiles : connectée au Bluetooth d'un téléphone portable, une personne clique pour envoyer un message, et le bracelet de la main de l'autre va se serrer et vibrer.

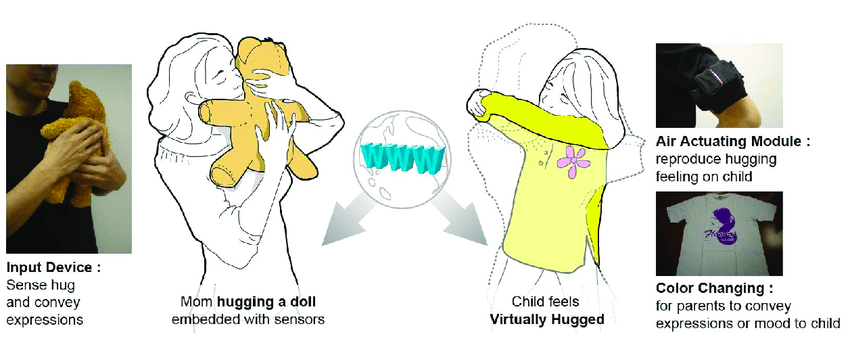
Les développeurs de HuggieBot ont découvert que les gens sont particulièrement sensibles aux câlins, notamment à la « localisation du toucher » et à « l'intensité du contact ».
Plus deux personnes sont émotionnellement proches, plus elles sont autorisées à toucher de zones. Cependant, pour les personnes qui ne sont pas proches l'une de l'autre, les serrer dans la mauvaise position deviendra en plus « offensant » ; du câlin ne suffit pas, il est facile de paraître superficiel et trop de force blessera la personne d'en face. Et le sentiment de cette intensité doit varier d’une personne à l’autre.
Donc les inventions comme les chemises à câliner et ainsi de suite ne parviennent toujours pas à restituer un câlin suffisamment chaleureux et réel.
Surtout après avoir vécu l'épidémie, les liens émotionnels des gens sont devenus plus fragiles au milieu de la distance et des obstacles, et ils sont plus désireux de s'embrasser. Bullock, le principal membre fondateur de HuggieBot, a déclaré :
Leur objectif en développant ce robot est de l'utiliser pour envoyer un câlin chaleureux hautement anthropomorphique afin de réconforter ceux qui sont socialement éloignés, notamment en raison de l'épidémie.
Faire un "câlin parfait" n'est pas facile
Comment améliorer le confort d'un câlin ? Accepter quelque chose comme ça est trop mystérieux, mais les scientifiques veulent quand même le quantifier.
En 2017, l'équipe a lancé sa première tentative. Ils ont créé un robot d'apparence très rudimentaire et ont conçu un total de 12 types de câlins différents.
Les deux bras et le torse du prototype de robot sont enveloppés de mousse épaisse et de coton
Ensuite, ils ont trouvé 30 volontaires et ont demandé au robot d'envoyer une douzaine de câlins à chaque personne : les câlins duraient plus ou moins longtemps, et les postures étaient différentes.
De façon inattendue, même si ce robot pèse 450 livres et est à peu près aussi grand qu'une personne, personne n'a été pressé par lui et personne ne s'est enfui à cause de la peur.
Au contraire, beaucoup de gens ont dit : « J'aime vraiment serrer le robot dans mes bras, car l'expérience est nouvelle et pas surprenante. » Ces retours positifs ont encouragé Bullock et son équipe, Ils ont même voulu défier « Le robot peut-il faire un câlin, c'est ça ? mieux qu’une vraie personne.
Ils ont donc d'abord étudié plusieurs robots sur le marché, en commençant par le plus ancien (1992) et le plus célèbre extrudeur Temple Grandin.
Écoutez, ce n’est même pas un robot, c’est juste une machine. La machine, qui crée une pression en pressant deux panneaux de mousse pour simuler un câlin, a été largement utilisée pour traiter les enfants autistes.
Plus tard, des produits de simulation animale ont été dérivés sur cette base, mais cela n'a fait que les rendre plus « conviviaux ».
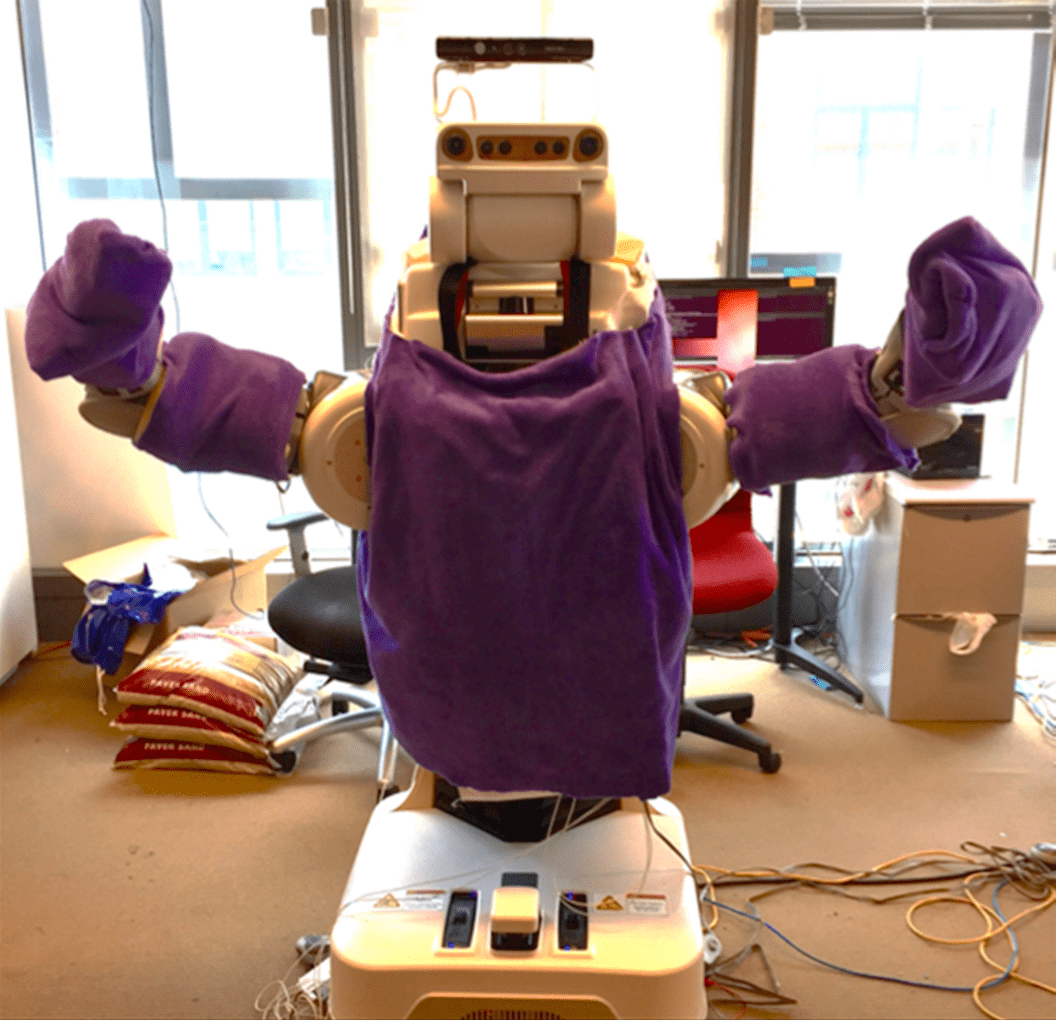
Sur cette base, Bullock et les autres ont créé le HuggieBot de première génération. En plus d'envelopper le robot dans du coton violet épais, ils ont également utilisé divers éléments chauffants pour rendre HuggieBot suffisamment doux et chaud.
Ils souhaitent également franchir une nouvelle étape : rendre les robots plus autonomes.
Ainsi, ils ont ajouté des capteurs tactiles à l'arrière du robot. Ces capteurs peuvent s'étirer et détecter le moment où l'utilisateur commence le contact et le moment où il souhaite mettre fin au câlin, prédisant ainsi « combien de temps et quelle force » le robot devrait donner à l'utilisateur. câlin.
Bientôt, Bullock a découvert qu'ils pensaient trop simplement.
Les gens sont particulièrement sensibles au début et à la fin d'un câlin. Surtout dès que l'utilisateur indique qu'il est prêt à être publié ; publiez-le trop tôt ou trop tard et l'utilisateur sera mécontent.
En d’autres termes, ce capteur tactile n’est pas suffisant à l’heure actuelle. Ils ont donc commencé à développer HuggieBot 2.0, le premier appareil intelligent de l'industrie qui utilise à la fois la perception visuelle et tactile pour offrir des câlins.
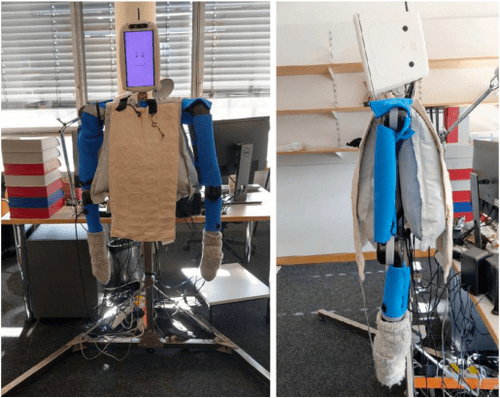
Il a une base en forme de V sur la partie inférieure, ce qui permet aux utilisateurs de s'en approcher plus facilement et de le serrer dans ses bras. Il existe également un système de détection sur mesure dans son corps appelé HiggieChest, qui contient un capteur de pression atmosphérique et un amplificateur de microphone.
En termes simples,
Cela peut rapidement transmettre le contact câlin de l'utilisateur à l'ensemble du corps du robot, ce qui facilite la réalisation rapide de réponses interactives.
En même temps, afin de permettre au robot d'ajuster ses mouvements en fonction des différentes morphologies des personnes et d'éviter que ses bras métalliques ne blessent les utilisateurs qui viennent les serrer dans leurs bras,les bras du robot sont réglés pour être très sensibles et intéressants .
En plus des câlins, les gens commencent à attendre plus des robots
Block a collecté un total de 512 données de câlins auprès de 32 utilisateurs dans le cadre de l'expérience et a découvert un phénomène intéressant.
Afin de garantir l'exactitude de la collecte de données, l'équipe de recherche a spécifiquement demandé aux sujets de n'effectuer qu'une seule action dans un seul câlin, comme caresser, serrer, etc.
Mais grâce à la vidéo du laboratoire, ils ont découvert que 7 des 32 participants combinaient inconsciemment divers gestes. Certaines personnes combinaient des frottements et des tapotements, et certaines personnes lâchaient le robot après l'avoir serré dans ses bras et lui tapotaient doucement l'épaule.
Il semble qu’en plus des simples câlins, les gens projettent progressivement des attentes plus émotionnelles sur les robots.
Dans les commentaires des utilisateurs, Block a également été surpris de constater : Par rapport à « l'angle et le processus de câlin parfaits » programmés, les utilisateurs préfèrent en fait que le robot fasse des réponses « improvisées » en fonction de leurs mouvements.
78,13% des participants ont déclaré que ce type de réponse leur donnerait le sentiment que le robot est plus énergique et réel, et qu'ils se sentiraient compris par l'autre partie. Bien que le retour de mouvement actuel soit complet, il est trop mécanique et ne fait pas ressentir le même investissement émotionnel dans les robots et les humains.
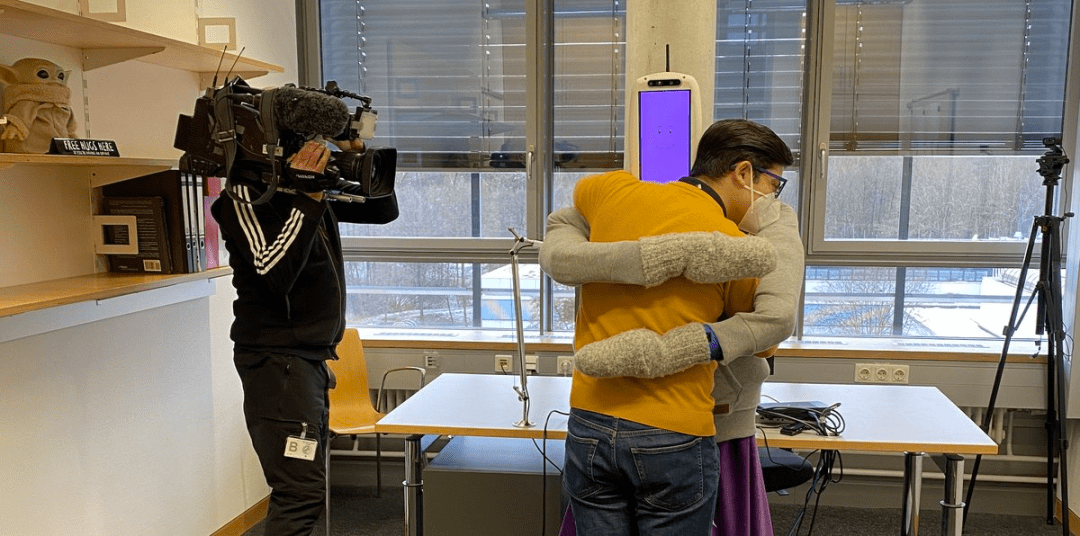
Ainsi, dans la dernière version - HuggieBot 3.0, l'équipe a mis en place la capacité du robot à fournir une « réponse passive » et une « réponse active ».
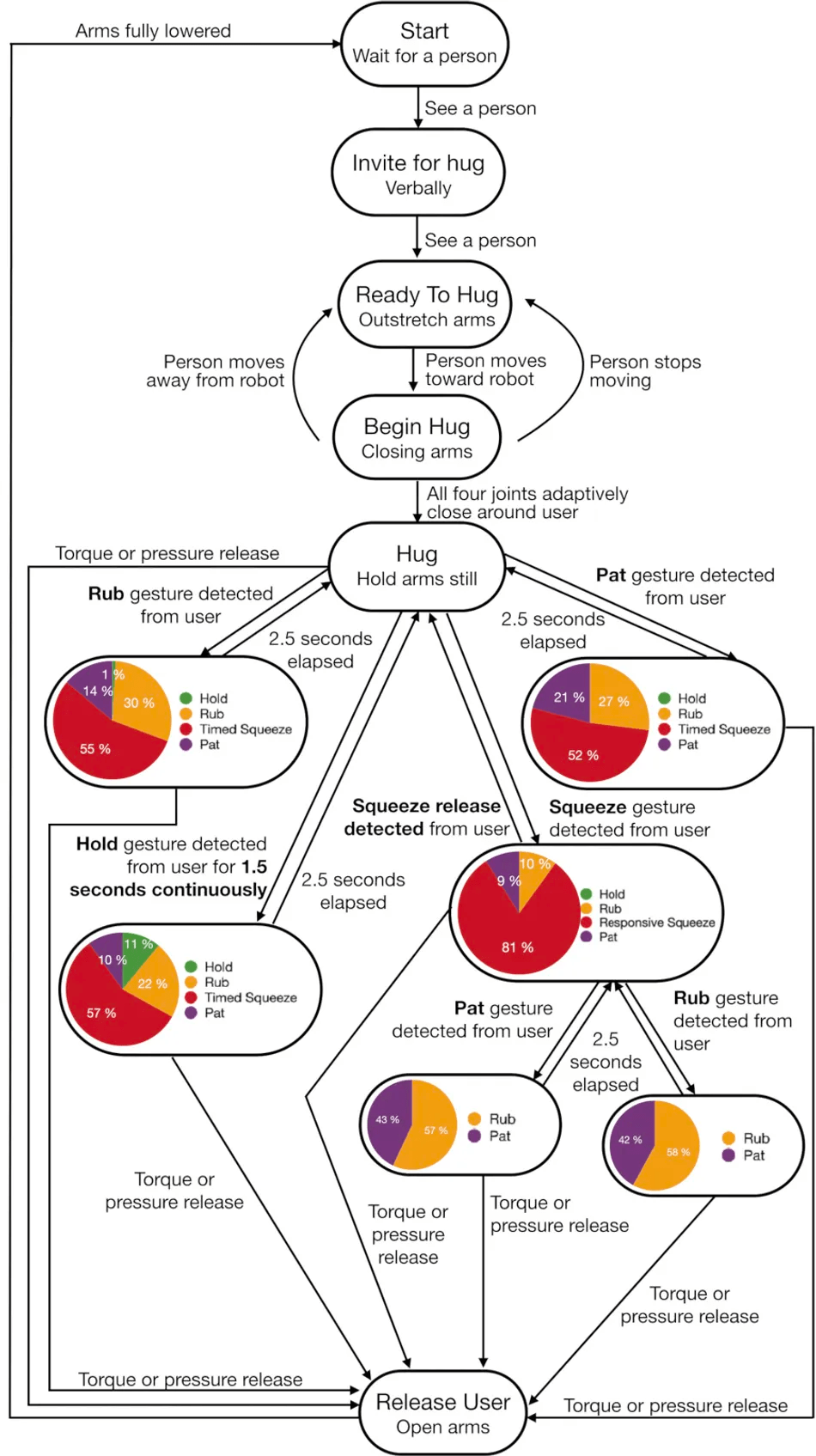
En termes simples, si le robot détecte que l'utilisateur tapote, serre ou frotte en plus de maintenir une posture de câlin, le robot réagira différemment en fonction de la probabilité de donner un retour.
Le robot peut patiemment répéter ces gestes, qu'ils soient effectués en une seule fois ou plusieurs fois de suite. N'est-ce pas bien mieux que beaucoup de vraies personnes ?
Mais si les gens se contentent de s'embrasser pendant une longue période sans faire aucune autre action, le robot déclenchera une « réponse active » et l'intervalle est d'environ 1,5 seconde.
Alors, faire un câlin semble simple, mais il est difficile de lâcher prise. L’interaction doit également être bien contrôlée.
Jusqu'à présent, l'équipe Block a résumé un ensemble de « normes d'excellence » grâce à des recherches quantitatives au fil des ans :
- doux;
- a de la température ;
- La taille du corps est similaire à celle d'un adulte ;
- Vous devez détecter avec sensibilité la personne qui s'approche, faire une invitation et l'action de câlin doit être synchronisée avec la personne ;
- Ajustez de manière proactive la position de vos bras pour que la personne étreinte se sente à l'aise ; Détectez rapidement les souhaits que l'autre personne a exprimés pendant le câlin
- ; Percevoir les gestes lors du câlin ;
- Répondez rapidement à ces gestes ;
- Chaque réponse doit être légèrement différente ;
- Pendant le processus de câlin, vous devez parfois prendre l'initiative et faire quelques gestes pour exprimer votre inquiétude.
- Demandez-vous :
Actuellement, l'équipe Bullock développe intensivement la quatrième génération de robots câlins. Même si vous ne pouvez pas acheter de robot pour vous soigner pour le moment, vous pouvez
apprendre à l'utiliser d'abord. Vu sous cet angle, la sincérité est toujours un must.
Nous n’avons pas besoin d’un « câlin parfait », ce dont nous avons besoin c’est d’un « câlin sincère ».Un œuf de Pâques
Afin d'éviter que certains utilisateurs ne s'impliquent trop et n'utilisent trop de force, les scientifiques ont également doté le robot d'un nouveau torse :
En thermoscellant le long des bords, puis en utilisant du ciment vinylique HH-66 sur le dessus du thermoscellage, il est plus solide et plus résistant à la pression.
Parce que quelqu'un m'avait trop serré auparavant, le robot a laissé échapper de l'air !
Références
[2] Les robots peuvent-ils donner de bons câlins ? | Hackaday https://hackaday.com/2022/01/24/can-robots-give-good-hugs/
[3] HuggieBot 3.0 – Le robot utilise la science pour offrir le câlin parfait https://www.odditycentral.com/technology/huggiebot-3-0-robot-uses-science-to-deliver-the-perfect-hug.html
Auteur : Lilyann
Editeur : biu
Sauf indication contraire, les images proviennent de la référence [1] et la capture d'écran vidéo qui y est jointe
Si nécessaire, veuillez contacter sns@guokr.com
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI