
Maison >Périphériques technologiques >IA >Un article parle du problème de synchronisation de l'horodatage de l'étalonnage du lidar et de la caméra
Un article parle du problème de synchronisation de l'horodatage de l'étalonnage du lidar et de la caméra

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-05-18 15:47:381617parcourir
01 Caractéristiques de la caméra - Exposition et lecture
La caméra acquérant une image est divisée en deux étapes : exposition et lecture. En fonction du capteur utilisé par l'appareil photo, la relation de chevauchement entre le temps d'exposition de l'appareil photo et le temps de lecture est également différente, et peut être divisée en exposition superposée et exposition non superposée.
Par rapport à l'exposition sans chevauchement, l'exposition avec chevauchement peut réduire l'impact du temps d'exposition sur le temps de dessin.
Phrase réécrite : Une fois l'exposition et la lecture de l'image actuelle terminées, l'exposition et la lecture de l'image suivante sont effectuées. Il s'agit d'une exposition sans chevauchement. La période de trame d'exposition sans chevauchement est supérieure à la somme du temps d'exposition et du temps de lecture de trame.
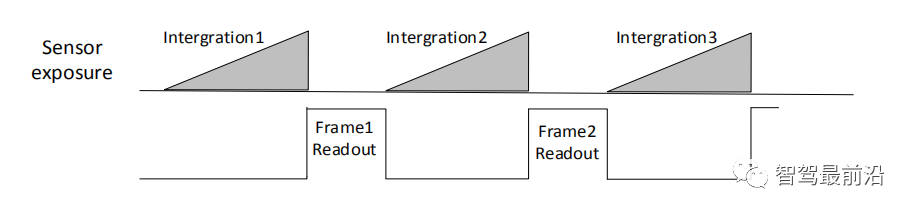
Mode de déclenchement interne, exposition sans chevauchement
L'exposition qui se chevauche signifie que l'exposition de l'image actuelle chevauche partiellement le processus de lecture de l'image précédente, c'est-à-dire l'image suivante. l’exposition a commencé alors que la lecture de l’image précédente est toujours en cours. La période de trame d'exposition qui se chevauche est inférieure ou égale à la somme du temps d'exposition et du temps de lecture de trame.
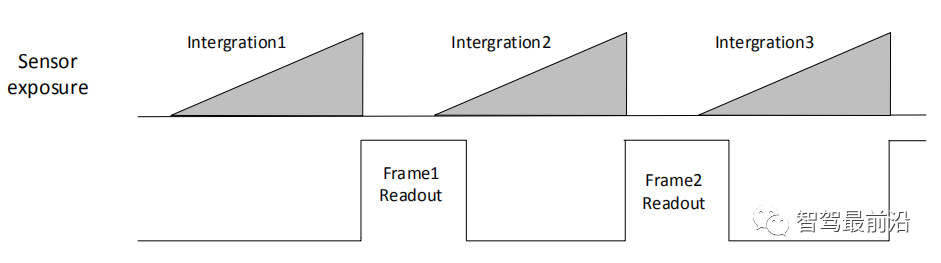
Mode de déclenchement interne chevauchant l'exposition
Oui ! Le but du paragraphe précédent est de vous dire : ne soyez pas surpris si le temps d'exposition de l'image actuelle chevauche le temps de lecture de l'image précédente dans la description suivante.
02 Acquisition d'images : mode de déclenchement (entrée externe)
Le mode de déclenchement de la caméra est divisé en deux types : le mode de déclenchement interne et le mode de déclenchement externe.
Mode de déclenchement interne : la caméra collecte des images grâce au signal émis à l'intérieur de l'appareil.
Mode de déclenchement externe : la caméra collecte des images via des signaux externes. Le déclencheur logiciel et le déclencheur matériel sont les deux principales formes de signaux externes. Les signaux externes peuvent être des signaux logiciels ou des signaux matériels. Le mode de déclenchement externe est comme indiqué sur la figure :
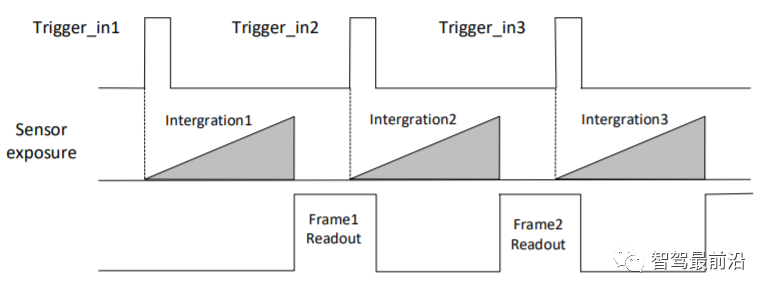
Mode de déclenchement externe
Déclenchement logiciel : Le signal de déclenchement est envoyé par le logiciel (vous pouvez également utiliser l'interface API fournie par la caméra SDK pour déclencheur logiciel).
Lors de l'utilisation du déclencheur matériel, la caméra se connecte au périphérique externe via son interface E/S et reçoit le signal d'impulsion de déclenchement du périphérique externe pour collecter des images. En fait, il lit et écrit directement les registres internes de la caméra. L'image ci-dessous représente le câble à 6 broches de l'alimentation IO de la caméra Hikvision :



Alimentation de la caméra Hikvision et interface IO (Hirose 6 broches )
Parmi eux, la caméra Hikvision dispose d'1 entrée isolée par optocoupleur Line0+ et d'1 entrée et sortie configurables Line2+, dont l'une peut être sélectionnée comme signal d'entrée.
03 Sortie de déclenchement
Le signal de sortie de déclenchement de la caméra est un signal de commutation, qui peut être utilisé pour contrôler des appareils externes tels que des lumières d'alarme, des sources lumineuses et un PLC. Le signal de sortie de déclenchement peut être réalisé via le signal stroboscopique.
Lorsque la caméra est exposée, elle génère immédiatement un signal stroboscopique de haut niveau efficace. Dans la suite, nous utilisons principalement ce signal pour effectuer des déclenchements durs sur d'autres capteurs tels que le Lidar. Il existe un concept de pré-sortie stroboscopique. Le signal stroboscopique prend effet avant l'exposition. Son principe de fonctionnement est de retarder l'exposition et d'effectuer d'abord la sortie stroboscopique. Cette fonction peut être appliquée aux appareils externes qui répondent lentement. La synchronisation de la pré-sortie stroboscopique est indiquée sur la figure. (Je parlerai plus tard des raisons pour lesquelles une exposition retardée est nécessaire).
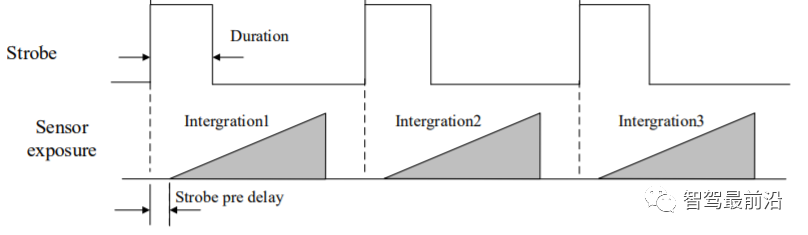
Synchronisation de pré-sortie du signal stroboscopique
Revenons maintenant au sujet, ça va être rapide maintenant.
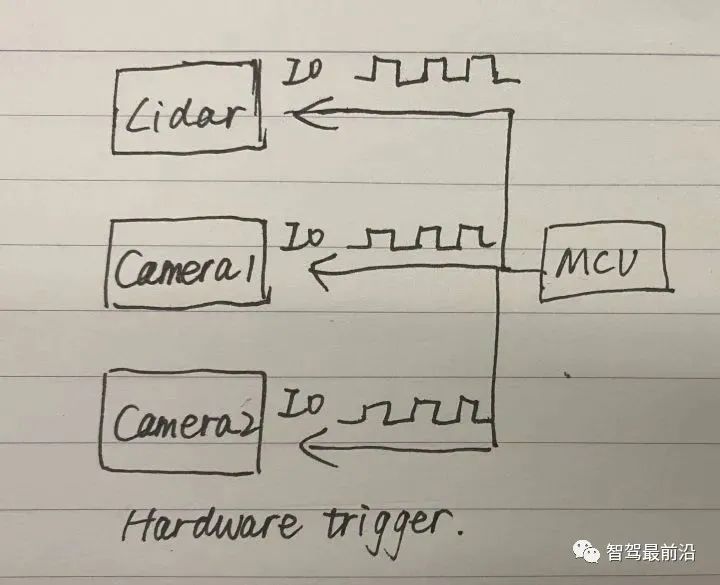
Il existe trois manières principales de synchroniser les horodatages de la caméra et du lidar : le déclenchement dur, le déclenchement doux et le déclenchement doux plus un déclenchement dur. Ci-dessous, je les présente un par un sous la forme d'un diagramme schématique dessiné à la main.
Parlons d’abord du déclenchement difficile. Un MCU génère des signaux d'impulsion pour déclencher trois capteurs.
Pour un déclenchement doux + un déclenchement dur, vous pouvez d'abord utiliser l'API du SDK de la caméra pour déclencher en douceur une caméra, puis utiliser le signal de déclenchement externe Strobe de la caméra pour effectuer un déclenchement dur sur d'autres capteurs tels que le radar. et des caméras.
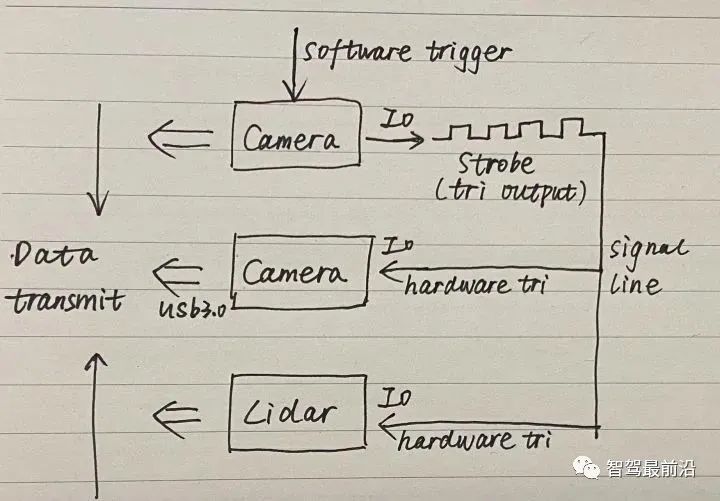
Il y a un problème qui doit être noté ici. Si la première caméra à déclenchement doux émet un signal stroboscopique en même temps que l'exposition, les autres capteurs à déclenchement dur le seront toujours. un pas en retard et ne peut pas être entièrement synchronisé. Par conséquent, le concept proposé précédemment de flash de pré-sortie est introduit, c'est-à-dire que la sortie du flash est effectuée avant l'exposition retardée.
Faites attention à quatre points lors de la configuration de ce mode :
- Méthode de déclenchement par front montant ou descendant
- Largeur de niveau effective, amplitude de niveau, vous devez connaître l'amplitude la plus basse pouvant déclencher le Lidar ;
- Pré-sortie stroboscopique ; ;
- Que les signaux de niveau des deux côtés soient les mêmes, que 3v ou 5v doivent être boostés ;
Enfin, parlons du déclencheur doux qui n'est pas recommandé.
Le premier appel à l'opération API est évidemment plus lent que le déclenchement dur (les opérations de lecture et d'écriture directes sur le registre interne du capteur API(1) ont déjà pris un certain temps avant d'exécuter la deuxième commande API(2).
<code>//读取lidar和image数据的线程1while(1){API(1); //软触发第一个sensorAPI(2); //软触发第二个sensor//假设脉冲周期为0.5s}//处理数据线程2for(i=0;i<nimage gettickcount t1 gettickfrequency></nimage></code>
Lorsque le temps requis pour traiter une seule image de données dépasse 0,5 seconde, le thread 1 lira l'image de données suivante, ce qui perturbera les données du thread 2. Le thread 2 doit terminer le traitement d'une seule image en 0,5 seconde et doit attendre après chaque image (1/fps - temps de traitement de l'image actuel).
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI