
Maison >Périphériques technologiques >IA >Un article pour revenir sur la conception d'une solution ultra-complète de synchronisation temporelle du système de conduite autonome
Un article pour revenir sur la conception d'une solution ultra-complète de synchronisation temporelle du système de conduite autonome

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-29 20:55:051496parcourir
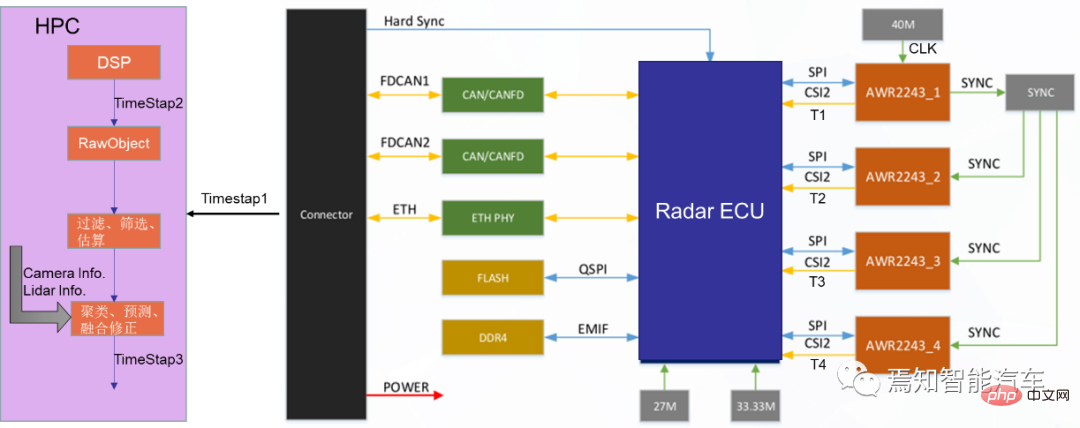
Le système de conduite autonome de nouvelle génération doit utiliser divers capteurs tels que plusieurs radars laser, plusieurs radars à ondes millimétriques et plusieurs caméras. Il y a un délai entre la collecte des données, leur traitement et leur envoi au contrôleur de domaine, et la durée du délai est instable. . Afin d'améliorer les performances de la conduite autonome telles que la fusion des capteurs, la planification des décisions et le positionnement par fusion, le contrôleur de domaine avancé de conduite autonome HPC et ses capteurs associés doivent être synchronisés dans le temps. Le processus actuel consiste à définir clairement les informations d'horodatage du capteur. données d'entrée (y compris les exigences en matière de temps d'horodatage et de précision), et doivent également définir le plan global de synchronisation temporelle et les exigences en matière de précision de synchronisation.
1 Présentation
Pour expliquer clairement le principe de la synchronisation d'horloge, nous devons d'abord expliquer les deux types de synchronisation d'horloge : l'horloge de données et l'horloge de gestion.
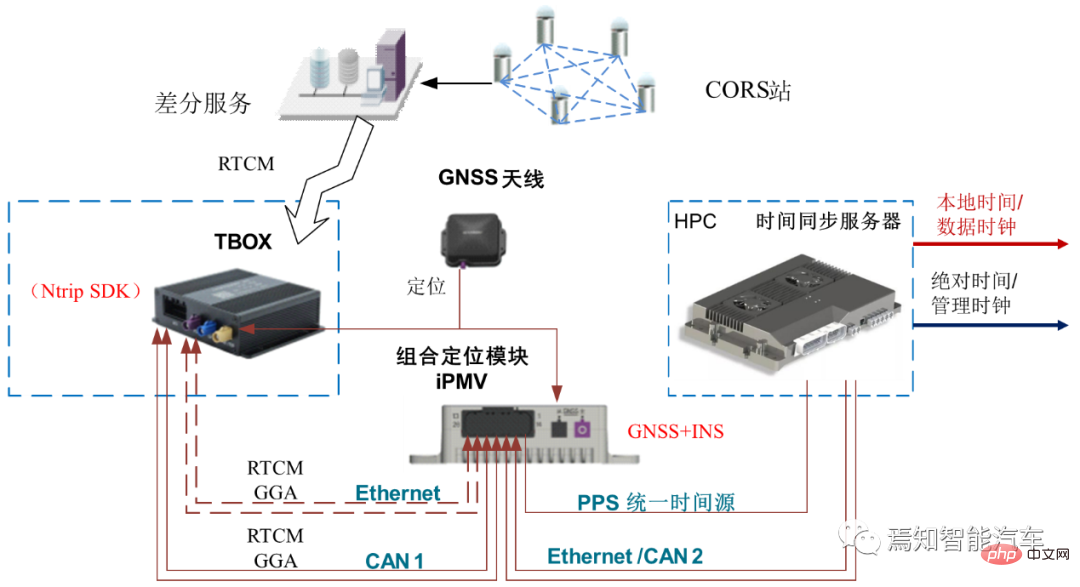
Tout d'abord, l'heure UTC fournie par la navigation inertielle combinée est utilisée pour fournir le timing au serveur de synchronisation de l'heure via PPS+GPRMC. Le serveur de synchronisation temporelle fournit des informations temporelles correspondantes à divers hôtes de collecte de données de capteurs via le protocole PTP et la passerelle centrale. HPC doit implémenter le processus de synchronisation temporelle entre le SOC interne et le MCU.
Le temps du plan de données entre le SOC de HPC et le MCU est synchronisé via le temps du protocole gPTP, avec SOC comme maître
Le temps du plan de gestion entre le SOC de HPC et le MCU est synchronisé via la synchronisation du protocole privé HPC ; , SOC est le maître et la synchronisation est effectuée via la liaison Ethernet.
Pendant le processus de synchronisation entre SOC et MCU, l'horloge de gestion et l'horloge de données seront synchronisées. Le plan de données utilise le protocole gPTP, et sa précision de synchronisation temporelle nécessite 250 microsecondes. L'horloge de gestion utilise un protocole privé, également via. Ethernet, et la précision est de 10 ms. Son temps de gestion interne et celui du plan de données doivent être alignés. Le HPC doit assurer la continuité de l'horloge des données et ne permet pas de sauts anormaux. Parce que des sauts anormaux peuvent entraîner de graves problèmes de communication et d’interprétation des données.
Chaque fois que le contrôleur de domaine démarre à froid, le contrôleur de domaine tentera de communiquer avec le nœud qui fournit l'horloge maître pendant une certaine période de temps (cette durée peut être calibrée à la demande en fonction de la situation réelle) pour la synchronisation initiale . Si la synchronisation réussit, l'horloge de données utilisera l'heure de gestion actuelle pour synchroniser l'heure absolue obtenue ; le pilote correspondant peut être démarré avec et appeler le logiciel d'application correspondant pour le calcul. Si la synchronisation échoue, le contrôleur de domaine continuera d'essayer de se synchroniser.
2 Processus de synchronisation du HPC et du VDC
L'ensemble de la catégorie de synchronisation comprend principalement la synchronisation entre le contrôleur de domaine central et la passerelle, divers capteurs et actionneurs. L'heure absolue du HPC fournit généralement une source de temps unifiée pour tous les contrôleurs du véhicule via la passerelle centrale CGW et transmet l'horodatage de synchronisation global à tous les contrôleurs associés (tels que le contrôleur de domaine de carrosserie PDC, le contrôleur de domaine de véhicule VDC, le contrôleur de domaine de cockpit CSC). , etc.). Dans l'architecture du système de conduite autonome de nouvelle génération, le contrôleur de domaine du véhicule VDC assume non seulement la fonction de contrôle du fonctionnement de l'actionneur du véhicule, mais sert également de passerelle centrale CGW, transportant l'interaction des informations et les protocoles entre HPC et d'autres contrôleurs de domaine. Fonction de transformation.
La figure suivante montre la relation de connexion entre le contrôleur de conduite autonome HPC et son contrôleur de domaine associé.
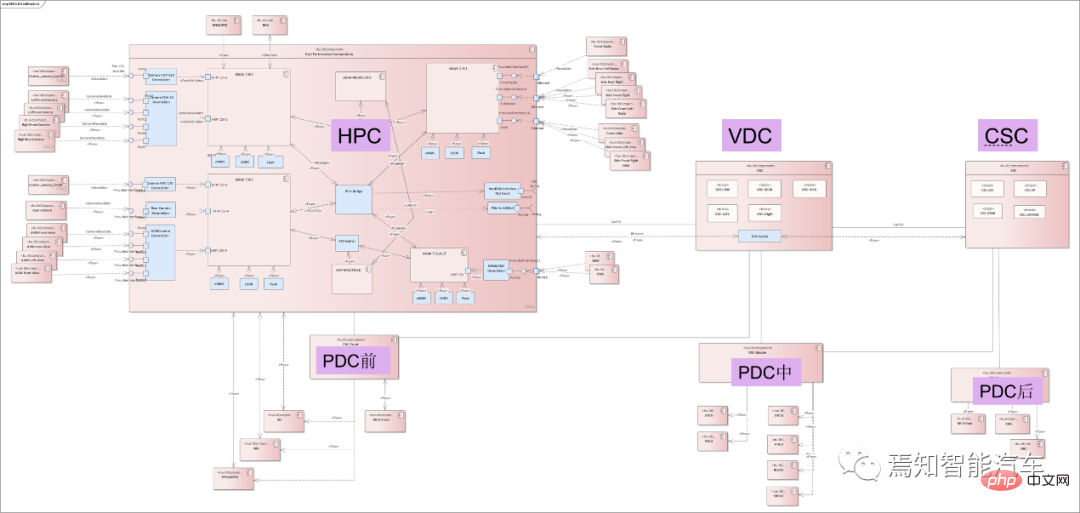
Comme mentionné ci-dessus, VDC peut fonctionner comme une passerelle centrale, de sorte que le processus de synchronisation inter-contrôleur centré sur HPC se concentre sur le processus de synchronisation entre HPC et VDC. Les fonctions de synchronisation et de communication entre les contrôleurs de domaine peuvent être réalisées grâce au transfert d'informations du VDC. Chaque contrôleur est principalement connecté directement via Ethernet, en utilisant le protocole gPTP basé sur Ethernet. Le processus de synchronisation entre HPC et VDC doit prendre en compte l'heure absolue de l'entrée GNSS directement connectée au HPC comme horloge principale, et l'erreur de temps est relativement faible (généralement dans les 10 ms). Compte tenu de la précision de l'analyse cloud des mégadonnées de conduite intelligente et de la précision du protocole gPTP qui doit généralement être inférieure à 250 microsecondes, les périodes fixes HPC et VDC peuvent être synchronisées en utilisant des multiples entiers de la précision (par exemple 125 millisecondes).
3 Processus de synchronisation du nœud de réseau local HPC
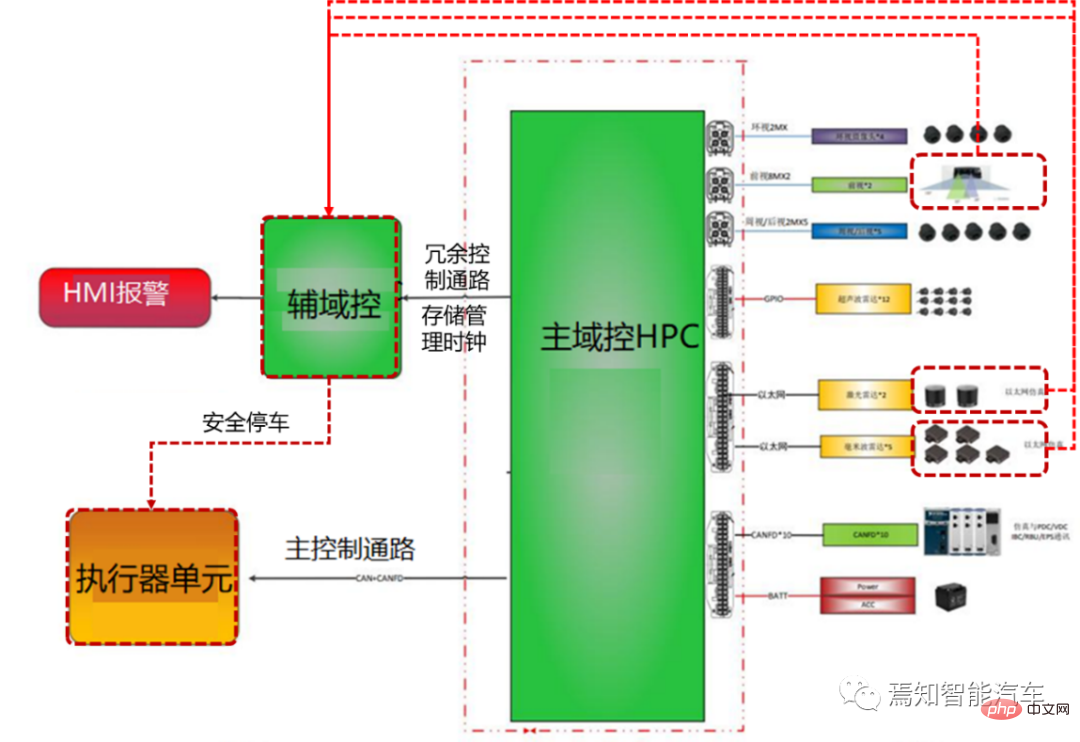
Le processus de synchronisation du nœud de réseau local HPC fait référence au processus de synchronisation entre celui-ci et le capteur. Dans le réseau interne privé de conduite autonome, le contrôleur de domaine est utilisé comme nœud maître et son heure de fin de données correspondante est utilisée comme source de temps. HPC fournit une source temporelle unifiée aux capteurs (lidar, radar à ondes millimétriques, caméra de conduite, caméra à vision panoramique, navigation inertielle combinée, etc.) via l'intranet local. Pendant le processus, le lidar et la navigation inertielle combinée sont connectés via Ethernet (1PPS réservé), le radar à ondes millimétriques et le boîtier à ultrasons PDC sont connectés via CANFD/Ethernet, et les caméras (y compris les caméras de conduite/vue panoramique) sont connectées via GSML/LVDS. Ce type de différentes formes de connexion réseau est utilisé comme nœuds esclaves pour la synchronisation temporelle avec la passerelle.
Il comprend principalement trois capteurs principaux comme suit :
Capteur visuel
Divisé par des caméras pour le contrôle de conduite et le contrôle de stationnement.
Les caméras de conduite comprennent principalement les caméras de vue frontale, les caméras de vue latérales et les caméras de vue arrière. Les caméras de stationnement font principalement référence aux caméras à vue panoramique qui adoptent une solution centralisée ne sont généralement plus des machines tout-en-un. , mais de simples capteurs, l'entrée est l'image originale.
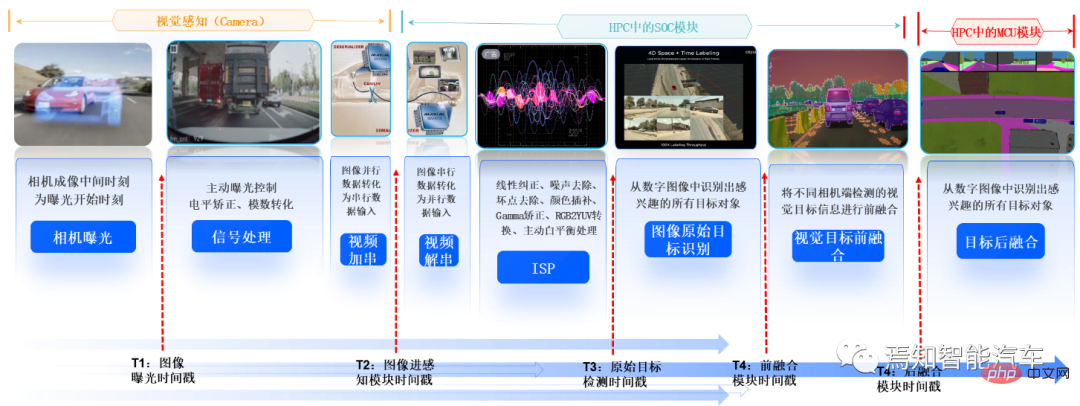
HPC et la caméra transmettent des données via des câbles de données vidéo tels que GSML ou LVDS. HPC utilise son horloge de données (c'est-à-dire l'heure du système, pas l'heure absolue) comme source de temps pour envoyer régulièrement le signal de déclenchement à la caméra. est basé sur le temps réel. Le signal de déclenchement ajuste le temps d'exposition. Étant donné que l'horodatage correspondant ne peut pas être directement enregistré dans une seule caméra, le déclenchement de synchronisation multi-caméras est utilisé pour la synchronisation, et le moment où le signal de déclenchement dans le contrôleur de domaine est enregistré est utilisé comme horodatage initial de l'image.
La caméra horodate toujours le processus d'imagerie (méthode de calcul ci-dessous) et la précision du temps doit être inférieure à 10 ms.
Tmilieu d'imagerie à mi-temps = Ttrigger (temps de déclenchement) + 1/2*Texposure (temps d'exposition)
Le temps d'exposition dans la formule ci-dessus est fixe.
Étant donné que le moment de déclenchement est situé à la fin de l'exposition de l'image entière, afin d'améliorer la précision de l'horodatage, la durée d'exposition doit être compensée pour obtenir le moment final d'exposition de la rangée du milieu. pour représenter le moment d'exposition médian de l'image entière, généralement comme suit : Formule de compensation temporelle.
Tcompensate (temps de compensation) = longueur de chaque ligne × nombre total de lignes/2
Le temps d'enregistrement du contrôleur de domaine comprend les 5 temps suivants : le temps intermédiaire de l'imagerie de la caméra, le moment où l'image entre le module de détection et le résultat de la détection d'image. L'heure du module de fusion, l'heure d'envoi du résultat de fusion perceptuelle et l'heure de réception du module en aval.
Lidar
Actuellement, le lidar semi-solide est principalement utilisé.
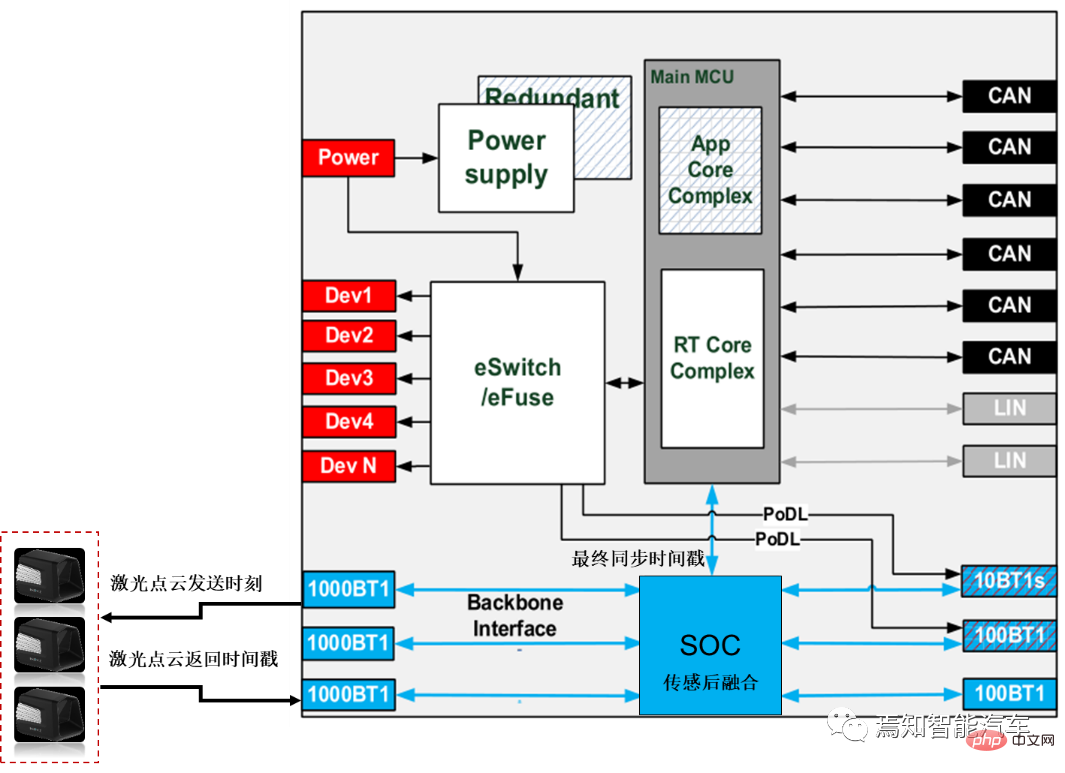
HPC et lidar sont généralement basés sur le protocole Ethernet gPTP combiné à une connexion directe Gigabit Ethernet. HPC est le nœud maître et le lidar est le nœud esclave. La source de temps de synchronisation HPC utilise le temps absolu (c'est-à-dire l'heure du système) comme horloge de données, et l'exigence de précision de synchronisation de l'heure est toujours inférieure à 250 microsecondes. HPC et lidar utilisent un multiple entier de la précision du temps de synchronisation (par exemple, cela peut être 125 millisecondes ou 250 ms) pour la synchronisation. Le lidar doit mettre à jour l'heure en temps réel en fonction de ce processus de synchronisation. De plus, le lidar doit émettre l'heure de chaque point dans le nuage de points de chaque image comme temps requis pour que le capteur horodatage (l'exigence de précision est inférieure à 1 ms).
De même, le contrôleur de domaine doit enregistrer le moment où le nuage de points laser est envoyé en fonction de l'heure de retour du lidar (c'est-à-dire le moment où le lidar peut enregistrer chaque point lors de la réception du signal réfléchi) ; (généralement, à ce moment, le Lidar dispose déjà des informations temporelles correspondantes, et HPC n'a pas besoin de les tamponner par l'horodatage du module de détection laser (généralement, les informations du nuage de points d'origine sont traitées par le fournisseur du lidar, et s'il s'agit d'une solution centralisée), le SOC dans HPC (responsable de la détection du nuage de points frontal et un SOC propriétaire pour la détection et la fusion back-end) ; les résultats de détection sont envoyés avec un horodatage au module en aval pour la réception et le dernier horodatage doit être horodaté à ce moment-là ; temps. Pour la détection de nuages de points laser, l'horloge de données du contrôleur de domaine est principalement utilisée pour la conception d'algorithmes de détection (ces algorithmes peuvent être sur la voiture ou sur le cloud), tandis que l'heure absolue implique principalement l'heure locale et est principalement utilisée pour l'enregistrement et l'enregistrement des données. prestations de stockage.
Radar à ondes millimétriques
fait principalement référence au radar à ondes millimétriques frontales et au radar à ondes millimétriques d'angle.
Habituellement, le radar à ondes millimétriques frontales synchronise seul les informations, tandis que le groupe de radars à ondes millimétriques angulaires lui-même aura un radar principal pour synchroniser davantage toutes ses informations. De manière générale, pour la génération précédente de conduite autonome, les données d'entrée du radar à ondes millimétriques utilisent généralement des données au niveau de la cible. Cependant, une fois que le contrôleur de domaine de nouvelle génération aura adopté une solution centralisée, lors de la mise à niveau du radar à ondes millimétriques 3D vers un radar à ondes millimétriques 4D, il le fera. être traités directement. L’appel à des nuages de points radar à ondes millimétriques se fait de plus en plus fort. Dans ce processus, le radar à ondes millimétriques ne dispose plus d’unité de calcul, mais saisit simplement des données de nuages de points.
Cependant, en raison de la grande difficulté du traitement du signal micro-ondes du radar à ondes millimétriques, pour la prochaine génération de systèmes de conduite autonome, de nombreux constructeurs utilisent encore des données au niveau cible pour une connexion directe, et la précision de la synchronisation temporelle nécessite généralement une plus grande précision. portée du lidar. Certains, généralement à moins de 1 ms. Le temps entre l'émission du radar à ondes millimétriques et le moment où il reçoit l'écho est marqué comme un horodatage, et la précision doit être inférieure à 1 ms.
En même temps, le HPC et le radar à ondes millimétriques sont synchronisés en définissant un intervalle de 1 à 2 secondes. Pendant cette période, le radar à ondes millimétriques met à jour l'heure correspondante en temps réel. De même, le contrôleur de domaine prend en charge l'enregistrement des horodatages contenant les cinq moments suivants en fonction du temps de retour du radar à ondes millimétriques :
horodatage de la génération du point de réflexion de l'écho, horodatage de l'entrée de l'écho au contrôleur de domaine (bien sûr pour les enregistrements de données au niveau cible, son radar à ondes millimétriques a des informations d'horodatage, Huawei n'horodatage plus); les informations sur la cible émises par le radar à ondes millimétriques sont obtenues en regroupant et en filtrant les points de réflexion d'origine. Afin d'obtenir un horodatage plus précis, il est généralement nécessaire d'obtenir le. original L'horodatage du moment où le point de réflexion a été généré, comme indiqué dans la partie rouge de la figure ci-dessous.
Les résultats de détection sont envoyés à un SOC/MCU dédié et fusionnés avec d'autres capteurs avec horodatages. De même, l'heure des données du contrôleur de domaine (ou heure locale) est utilisée pour les opérations de conception d'algorithmes, tandis que l'heure absolue est utilisée pour les opérations d'enregistrement et de stockage des données.
HPC doit ajouter un horodatage correspondant au moment d'entrée des paquets de caméra intelligente et de radar, et horodater les données dans le module de détection à tout moment. Il peut être utilisé comme sauvegarde pour confirmer avec les radars à ondes millimétriques, en particulier. Les radars d'angle, grâce aux informations de synchronisation temporelle, peuvent déterminer si le radar d'angle peut lancer la cible.
Navigation inertielle combinée/système de navigation inertielle indépendante
Dans la prochaine génération de systèmes de conduite autonome, différents constructeurs utilisent différents types de navigation inertielle, qui sont généralement divisés en navigation inertielle combinée en fonction de leur auto -capacités de recherche Il en existe deux types : la navigation inertielle guidée et indépendante. Étant donné que la navigation inertielle combinée dispose d'un algorithme de combinaison satellite-inertiel intégré, basé sur la situation réelle de l'application, nous expliquons ici uniquement la connexion directe de la navigation inertielle combinée plus simple. HPC sert de nœud maître et le système de navigation inertielle combiné sert de nœud esclave. Il est directement connecté au système de navigation inertielle combiné via Ethernet 100M.
Parmi eux, Ethernet est toujours basé sur le protocole gPTP. La source de temps de synchronisation HPC utilise toujours l'horloge des données (c'est-à-dire l'heure du système, et non l'heure absolue) pour la synchronisation. Exigences de précision de synchronisation temporelle requises : dans un délai de 250 microsecondes, la période de synchronisation est un multiple entier des exigences de précision de synchronisation (telles que 1 milliseconde ou 125 millisecondes). Pendant cette période, la navigation inertielle combinée horodatage le dernier échantillonnage IMU sur la base des informations RTK et IMU. Sa précision est limitée à 1 ms.
De plus, l'heure d'échantillonnage de l'IMU, l'heure d'entrée dans le HPC et l'heure d'entrée dans le module de fusion back-end seront toutes horodatées.
4 Processus de synchronisation de l'heure des nœuds du réseau externe HPC
En plus de la synchronisation de l'heure des nœuds de réseau internes, Pour le système de conduite autonome de nouvelle génération, il existe une grande quantité d’informations externes interagissant entre celui-ci et les actionneurs associés (tels que le système de commande de freinage intégré EPBi, le système de direction électronique EPS et le système de commande de puissance VCU). En ce qui concerne la méthode de contrôle centralisé par étapes, ce type de port de contrôle du véhicule est généralement connecté et contrôlé de manière synchrone via le contrôleur du véhicule VDC. Comme mentionné ci-dessus, le VDC peut en fait être considéré comme une passerelle centrale. En plus de transmettre les informations aux différents contrôleurs de domaine, il est également responsable de la définition et de l'envoi de l'intégralité de l'horodatage de synchronisation. Car pour l’ensemble du système du véhicule, l’intégralité du temps absolu est obtenue à partir du GNSS/GPS connecté au contrôleur de domaine HPC du système de conduite autonome.
Le système associé effectue généralement un contrôle de synchronisation horaire indépendant via le port de contrôle de domaine du véhicule (VDC), il n'y a donc généralement aucune connexion entre HPC et ESP, EPS et VCU. Pour une relation de synchronisation temporelle directe entre nœud maître et esclave, les horodatages respectifs sont directement envoyés au contrôleur VDC pendant l'exécution des instructions, et l'alignement temporel est effectué pendant l'exécution.
5 Processus de synchronisation du temps dans le processus de contrôle de redondance de sécurité HPC
Pour l'ensemble du système de conduite automatique Cela dit , la logique de contrôle des pannes correspondante doit encore être prise en compte pendant le processus de synchronisation temporelle. Tenant compte des différentes fonctions portées par la puce AI SOC et la puce logique MCU qu'elle contient. Il existe généralement un certain degré de dégradation fonctionnelle à différents moments lorsque les deux échouent. Ce type de dégradation fonctionnelle est appelé dégradation fonctionnelle partielle. Lors d'une dégradation partielle des fonctions, si une partie du SOC tombe en panne, le MCU se synchronise avec le capteur pendant le temps de maintenance de l'oscillateur à cristal. Pendant cette période, les informations sur les données cibles de la caméra transmises par le radar et d'autres SOC peuvent toujours être reçues, et l'horodatage de sortie reste stable. Par conséquent, on peut dire qu'après une rétrogradation partielle des fonctions, le système utilisera toujours l'horodatage d'origine pour répondre dans un court laps de temps, et le MCU peut toujours maintenir la stabilité des données temporelles d'origine (le processus de synchronisation temporelle peut être effectué). en référence à l'horloge interne du MCU), prenant en charge le fonctionnement de la fonction. Étant donné que l’erreur est très faible sur une courte période, le risque de ne pas synchroniser l’heure pendant cette période est également très faible.
Bien sûr, si l'ensemble du HPC tombe en panne, un autre contrôleur de secours est nécessaire (il peut s'agir d'un autre contrôleur discret La version HPC peut également être une caméra intelligente supplémentaire (Smart Camera) pour le contrôle de sécurité. Au cours de ce processus, la relation de synchronisation temporelle entre le contrôleur de secours et le capteur correspondant doit être rétablie.
Un autre mode de défaillance est la dégradation fonctionnelle causée par une panne de courant. Il convient de noter ici qu'il existe deux modes de veille pour les contrôleurs de domaine : la veille profonde et la veille légère. Ce mode veille est principalement lié à la nécessité ou non de couper l'alimentation électrique globale. Si le contrôleur est en veille profonde, l'horloge de données utilise directement l'horloge de gestion stockée lors de la dernière mise hors tension sans resynchronisation. Si le contrôleur est en veille légère, l'horloge de gestion de cette mise hors tension est directement utilisée pour le timing. Par rapport au sommeil profond, les résultats d'horloge de la synchronisation du sommeil léger sont plus précis. Bien entendu, quelle que soit la profondeur du sommeil, l'horloge du contrôleur est toujours invalide pendant cette période et tous les logiciels ne peuvent pas fonctionner normalement. Bien entendu, la durée totale de la conversion du sommeil léger au sommeil profond peut être personnalisée (par exemple 12 heures).
6 Résumé
Cet article explique en détail le timing de chaque unité de contrôle de la prochaine génération Principe de synchronisation du système de conduite autonome et propose des exigences de précision pour chaque module du processus de synchronisation, impliquant la synchronisation des nœuds de réseau local et la synchronisation des nœuds de réseau global. Parmi eux, la synchronisation des nœuds du réseau local vise principalement la relation de synchronisation entre les capteurs et le contrôle de domaine à l'intérieur du système de conduite autonome. La synchronisation globale des nœuds du réseau vise principalement la relation de synchronisation temporelle entre le système de conduite autonome et les systèmes externes associés (tels que le contrôle du freinage, de la direction, de l'alimentation, des portes, des lumières, des passerelles, etc.).
Pour la précision globale du calcul, la synchronisation des nœuds du réseau local est cruciale, car de nombreuses unités de capteurs sont impliquées, et chacune doit être marquée d'un horodatage correspondant en fonction de sa situation réelle, et finalement le contrôleur de domaine effectue une synchronisation globale. Pour la synchronisation globale des nœuds de réseau, les informations temporelles peuvent être simplement échangées en se référant à l'interaction d'informations entre chaque contrôleur de sous-domaine et le HPC. Il convient de noter ici que l'heure absolue de l'ensemble du système provient du système GNSS, qui peut généralement être connecté et saisi par HPC ou CSC.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI