
Maison >Périphériques technologiques >IA >Bilan de 20 indicateurs clés pour la sélection des puces IA de conduite autonome
Bilan de 20 indicateurs clés pour la sélection des puces IA de conduite autonome

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-26 11:43:071040parcourir
En tant que composant central de la conduite autonome et « cerveau » de la conduite autonome, le contrôleur central doit généralement être connecté à plusieurs caméras externes, radar à ondes millimétriques, lidar, IMU et autres équipements. Les fonctions qu'il remplit incluent la reconnaissance d'images. , traitement des données, etc.
En tant que matériel intelligent, afin d'effectuer des calculs d'IA complexes et un contrôle intelligent, le niveau matériel nécessite des puces de traitement d'IA qui supportent les énormes exigences de puissance de calcul telles que la perception de l'environnement et l'apprentissage en profondeur, ainsi que des processeurs responsables du contrôle. prise de décision et opérations logiques, et le MCU responsable de la sécurité fonctionnelle et du contrôle des véhicules ; le niveau logiciel comprend les systèmes d'exploitation, les middlewares et les algorithmes d'IA de la couche application.
Trois parties de puces au niveau matériel ou trois puces importantes :
La première partie est généralement un GPU ou un TPU, qui répond aux exigences de calcul parallèle à virgule flottante à grande échelle et est principalement utilisé pour la perception de l'environnement et fusion d'informations, y compris les caméras, la reconnaissance, la fusion, la classification des informations des capteurs tels que le lidar, etc., comme l'unité GPU de Xavier et Ascend 310.
La deuxième partie est principalement une architecture ARM, similaire au CPU, principalement responsable des opérations logiques et du contrôle décisionnel, et du traitement des calculs série en virgule flottante de haute précision.
La troisième partie est principalement responsable de la fiabilité et du contrôle du véhicule, c'est-à-dire de la sécurité fonctionnelle et de la surveillance redondante. Elle ne nécessite pas une puissance de calcul élevée, mais la fiabilité doit être garantie. Le niveau ISO26262 nécessite actuellement ASIL-D. les plus couramment utilisés sont le TC297 ou le TC397 d'Infineon.
Les algorithmes d'IA de la couche d'application au niveau logiciel sont généralement développés par les constructeurs automobiles ou les équipementiers eux-mêmes, ce qui reflète les performances et les différences des véhicules ; le middleware est généralement fourni par les développeurs de contrôleurs de domaine, similaires à ROS, et comprend principalement un pilote d'interface et un déploiement optimisé de système opérateur.
En termes de système d'exploitation, Huawei utilise le système Hongmeng auto-développé et la plate-forme MDC est compatible avec Adaptive AUTOSAR ; ont gagné en popularité grâce à l'open source Avec le plus grand nombre d'utilisateurs, en particulier Linux, les systèmes d'exploitation basés sur le noyau Linux sont actuellement très populaires grâce à sa solide base d'ingénierie et son écosystème, associés aux années de base d'applications de ROS.

À propos de la sélection des puces IA pour la conduite autonome
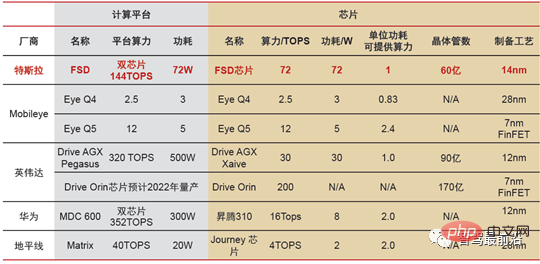
Il n'y a pas beaucoup de puces IA parmi lesquelles choisir sur le marché, en particulier celles qui ont atteint la production de masse, seulement Tesla, NVIDIA, Mobileye. À l'exception des produits développés et utilisés par Tesla, d'autres marques peuvent actuellement obtenir des échantillons de test grâce au développement coopératif.
Prenons NVIDIA Xavier comme exemple. Relativement parlant, comme NVIDIA Xavier a été lancé plus tôt et que la configuration écologique est relativement complète, les développeurs peuvent rapidement créer des systèmes et développer des applications d'IA, ils sont donc basés sur le module Xavier. Rares sont les entreprises qui conçoivent des contrôleurs de domaine.
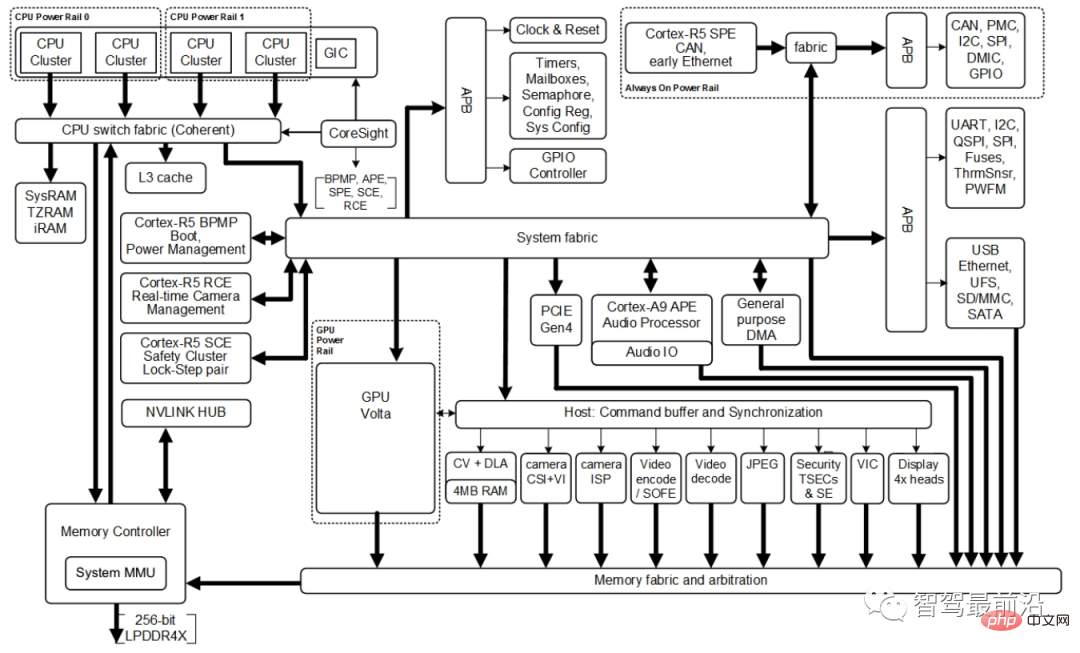
XavierSoC a une puissance de calcul maximale allant jusqu'à 30TOP et contient six processeurs différents, dont un GPU Valta TensorCore, un processeur ARM64 à huit cœurs, un double accélérateur d'apprentissage en profondeur NVDLA, un processeur d'image, un processeur visuel et un processeur vidéo, ce qui le rend capable de traiter des dizaines d'algorithmes simultanément et en temps réel pour le traitement des données des capteurs, la sensibilisation à l'environnement, le positionnement et la cartographie, ainsi que la planification des itinéraires.
La structure interne de la puce est présentée dans l'image ci-dessous :
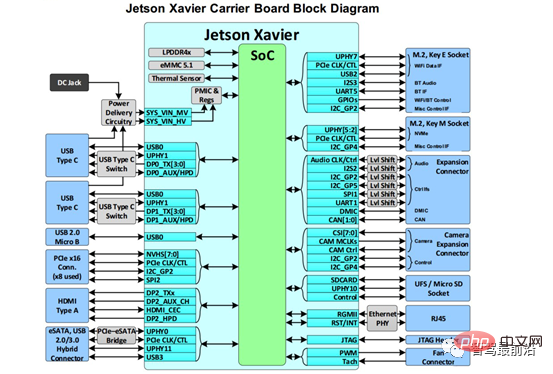
Xavier fourni par NVIDIA est le module principal, et son interface est présentée dans l'image ci-dessous :

Indicateurs clés de la puce
1) Noyau : Le noyau est généralement le centre de l'espace. D'une part, il facilite la communication entre le contrôleur de conduite automatique et les capteurs et actionneurs périphériques, et en même temps, il utilise également la périphérie pour la protéger. Core met l'accent sur l'état de fonctionnement. Core-down fait généralement référence à un problème de calcul du processeur. Core met l'accent sur la fonction principale de la fonction externe globale du contrôleur de conduite automatique.
2) DMIPS : Principalement utilisé pour mesurer les capacités de calcul d'entiers. Il inclut le nombre de jeux d'instructions pouvant être exécutés par seconde et le nombre de tâches que ces jeux d'instructions peuvent accomplir par seconde lors de la mise en œuvre de mon programme de test. Cette capacité est déterminée par l'architecture du processeur, la vitesse d'accès à la mémoire et d'autres caractéristiques matérielles. Décider. Il s'agit d'une unité qui mesure les performances relatives du processeur lors de l'exécution du programme de test correspondant (dans de nombreuses situations d'évaluation de puces de conduite autonome, les gens sont habitués à utiliser MIPS comme unité de cet indicateur de performance).
3) Mémoire : Les principales fonctions de l'unité de gestion de la mémoire comprennent : le mappage d'adresse virtuelle à l'adresse physique, le contrôle d'accès à la mémoire, la prise en charge du cache, etc. ; ## 🎜🎜#
4) DataFlash : DataFlash est un produit de mémoire Flash série de grande capacité lancé par la société américaine ATMEL. Il est fabriqué selon la technologie Nor et peut être utilisé pour stocker des données et des codes de programme. . Par rapport à la mémoire Flash parallèle, elle nécessite moins de broches, est de petite taille, facile à étendre, simple à connecter à un microcontrôleur ou à un contrôleur et fiable en fonctionnement. Par conséquent, les contrôleurs Flash série similaires à DataFlash sont de plus en plus utilisés dans les contrôleurs de conduite automatique. Les produits et les systèmes de mesure et de contrôle sont en cours d'évaluation.5)ISP : En tant que cœur de la puce de traitement visuel, les principales fonctions de l'ISP incluent AE (exposition automatique), AF (mise au point automatique), AWB (automatique balance des blancs), supprimez le bruit de l'image, LSC (Lens Shading Correction), BPC (Bad Pixel Correction), et enfin enregistrez les données brutes et transmettez-les au vidéocodec ou au CV, etc. De meilleurs effets d'image peuvent être obtenus grâce au FAI, de sorte que les exigences en matière de FAI dans les voitures autonomes sont très élevées. Par exemple, les FAI à double canal, voire à trois canaux, commencent à être intégrés. D'une manière générale, le FAI est intégré au point d'accès (pour de nombreux fabricants de puces AP, il s'agit d'un élément clé d'une concurrence différenciée), mais à mesure que les besoins évoluent, des FAI indépendants apparaissent également. La raison principale est qu'il peut être configuré de manière plus flexible. En même temps, il compense et coopère avec les déficiences de la fonction ISP dans la puce AP.
6) Puissance de calcul : La réalisation de la conduite autonome nécessite de s'appuyer sur des capteurs sensibles à l'environnement pour collecter des informations sur l'environnement routier et transmettre les données collectées au processeur central de la voiture. Le traitement est utilisé pour identifier les obstacles, les routes réalisables, etc. Sur la base des résultats de reconnaissance, le chemin est planifié, la vitesse du véhicule est définie et le véhicule est automatiquement contrôlé. L'ensemble du processus doit être terminé en un instant et le délai doit être contrôlé à l'échelle de la milliseconde, voire de la microseconde, pour garantir la sécurité de la conduite autonome. Pour obtenir les effets de traitement, de retour d'information, de prise de décision, de planification et d'exécution instantanés, les besoins en puissance de calcul du processeur central sont très élevés.
Dans la conduite autonome, le traitement visuel consomme le plus de puissance de calcul, représentant plus de la moitié des besoins totaux en puissance de calcul, et chaque niveau de conduite autonome augmente, la. la demande de puissance de calcul est au moins décuplé. Le niveau L2 nécessite 2 TOPS de puissance de calcul, L3 nécessite 24 TOPS de puissance de calcul, L4 est de 320TOPS et L5 est de 4000+TOPS.
La puissance de calcul théorique est calculée sur la base de l'accumulation des opérations de multiplication de la couche de convolution nette. Chaque multiplication-accumulation (MAC) dans la couche de convolution est calculée comme deux. OPS. Le nombre d'opérations de convolution représente plus de 90 % de DL NET, et les autres opérations auxiliaires ou sur d'autres couches sont ignorées. Le nombre total d'opérations de multiplication dans toutes les couches de convolution du SSD est de 40 G MAC, donc la puissance de calcul théorique. est de 80GOPS.
Parmi eux,

7) Consommation d'énergie : dans le mode de performance le plus élevé, si la consommation d'énergie de la puce du contrôleur de conduite automatique est élevée, même si ses propres performances sont fortes, cela entraînera des dangers cachés imprévisibles. le pouvoir calorifique est doublé et le taux de consommation électrique est doublé, ces résultats sont sans aucun doute une « bombe nucléaire » notamment pour les véhicules à énergies nouvelles. Par conséquent, nous devons pleinement prendre en compte ses indicateurs de consommation d’énergie dès la conception initiale des puces de conduite autonome. 8) GPU 3D : le GPU est conçu sur la base d'un débit élevé et est utilisé pour gérer le calcul parallèle à grande échelle. L'unité de contrôle GPU peut combiner plusieurs accès en moins d'accès. Le GPU utilise plus de transistors pour les unités d'exécution au lieu d'un cache de données complexe et d'un contrôle d'instructions comme le CPU. Étant donné que les GPU ont des capacités de calcul à virgule flottante, ils peuvent être utilisés dans des applications de traitement d'images ou de vidéos à l'avant des voitures intelligentes. Ils sont également de plus en plus utilisés dans les conceptions grand public pour le calcul haute performance dans les contrôleurs centraux. 9) Ressources d'interface IO riches Le processeur de contrôle principal de la conduite autonome nécessite des interfaces riches pour se connecter une variété de dispositifs de capteurs. À l'heure actuelle, les capteurs de conduite autonome courants dans l'industrie comprennent principalement : les caméras, le lidar, le radar à ondes millimétriques, le radar à ultrasons, la navigation intégrée, les modules IMU et V2X. 11) Objectif de sécurité : l'objectif de sécurité fonctionnelle est l'exigence de conception fondamentale de l'ensemble du contrôleur central de conduite autonome en raison de son impact sur l'analyse des défaillances ponctuelles dans l'ensemble de la conduite autonome. conception fonctionnelle En conséquence, il est nécessaire d'examiner pleinement si le système peut répondre pleinement aux exigences de conception de sécurité fonctionnelle du système pour le matériel dès la première conception matérielle. 12) OTA : la mise à niveau à distance répare les défauts du logiciel pour les utilisateurs, réduit considérablement le temps des étapes intermédiaires, permet au logiciel d'atteindre les utilisateurs rapidement et peut ajouter de nouvelles fonctions à le véhicule en même temps. Élargir la portée du « service » et de « l’exploitation ». Par conséquent, il est indispensable de savoir si la puce du contrôleur central prend en charge l'OTA pour réduire les coûts des constructeurs automobiles et des utilisateurs, y compris les coûts de rappel des constructeurs automobiles, le coût du temps des utilisateurs, augmenter la fraîcheur des utilisateurs et augmenter la valeur ajoutée des véhicules. 13) Type de package : La taille du package du contrôleur, la définition des broches, etc. affectent la forme d'installation du contrôleur de conduite global et affectent également la situation de connexion aux composants périphériques. distribution. De plus, l'interface est-elle étanche ? Si elle est étanche, l'environnement d'installation du contrôleur peut être relativement libre. Cependant, les interfaces de contrôle de domaine actuelles ne sont pas étanches. 14) Température/Tension : La plage de contrôle de la température du contrôleur comprend sa température ambiante de stockage et d'utilisation, et si le véhicule réel est confirmé plus tard, l'onde millimétrique avant Disposition de l'assemblage du contrôleur Si les températures régionales de stockage et d'utilisation sont supérieures à cette valeur, un certain degré de rectification et de plage d'ajustement doit être effectué sur cette base pour répondre aux exigences du fabricant d'origine, et le fournisseur doit s'assurer qu'aucun rappel n'est dû à défauts de conception du matériel. Surtout lorsque la puissance de calcul atteint plus de 100 et que la consommation électrique dépasse 60 W, l'augmentation de la température nécessitera très probablement un refroidissement actif pour garantir que la chaleur puisse être transférée à temps sans affecter le fonctionnement normal du contrôleur. Le refroidissement actif comprend généralement : le refroidissement par ventilateur et le refroidissement par eau. 15) Réglementation automobile et sécurité fonctionnelle : Par rapport aux produits électroniques grand public, les puces automobiles ont les exigences les plus élevées en termes de sécurité et de fiabilité. Les puces automobiles fonctionnent depuis de nombreuses années dans un environnement difficile de températures élevées et basses de « -40 ℃ à 125 ℃ » et de vibrations sévères afin de garantir que les produits électroniques automobiles répondent aux exigences de qualité élevées en matière de température de fonctionnement et de fiabilité. et durée de vie du produit, International Automotive Electronics L'Automotive Electronics Council (AEC) a établi des normes de certification de qualité pertinentes, parmi lesquelles AEC-Q100 est une norme de certification pour les tests de résistance des circuits intégrés automobiles. Après des années de développement, la norme AEC-Q100 est devenue la norme industrielle de facto pour les produits électroniques automobiles en termes de fiabilité et de durée de vie du produit. En plus de répondre aux exigences réglementaires des véhicules, les puces de conduite autonome doivent également répondre aux exigences de certification « Function Safety (Fusa) » définies par la norme ISO 26262. L'exigence de conception de la sécurité fonctionnelle pour les puces est de rechercher et de corriger autant que possible les défaillances des puces (divisées en : défaillances du système et défaillances aléatoires). La défaillance du système est essentiellement un défaut dans la conception du produit, elle repose donc principalement sur les spécifications du processus de conception et de mise en œuvre, tandis que la défaillance aléatoire repose davantage sur le mécanisme spécial de détection des défaillances dans la conception des puces. ISO 26262 divise les niveaux de sécurité, les plus courants sont les niveaux ASIL-B et ASIL-D. ASIL-B nécessite que la puce couvre 90 % des scénarios de défaillance en un seul point, tandis qu'ASIL-D en nécessite 99 %. Plus la surface de la puce est grande et plus il y a de transistors, plus le taux de défaillance correspondant est élevé. 16) Système de puce : par exemple, si le contrôleur prend en charge la méthode de contrôle intégrée MCU+MPU, ou prend uniquement en charge le contrôle à puce unique. 17) Sécurité de la chaîne d'approvisionnement : Une demande accrue du marché a conduit à des pénuries dans la chaîne d'approvisionnement et la capacité de production des semi-conducteurs, y compris diverses « catastrophes naturelles » qui perturbent le rythme normal de production des semi-conducteurs, et la contradiction entre la demande et la capacité de production est difficile à résoudre à court terme. La chaîne d'approvisionnement mondiale en puces étant si serrée, la sécurité de la chaîne d'approvisionnement est également très difficile pour les fournisseurs de contrôleurs de domaine. Lorsque les OEM sélectionnent des fournisseurs de contrôleurs de domaine, les capacités d’approvisionnement de leurs fabricants de puces partenaires sont également des considérations importantes. En 2022, les pénuries de puces affectent toujours l'industrie automobile. Certains équipementiers ont commencé à réfléchir à de nouvelles idées en matière d'approvisionnement en semi-conducteurs, et certains ont même contourné le niveau 1 et se sont adressés directement aux fabricants de conception de puces. Les constructeurs OEM plus approfondis ont commencé à participer au processus de recherche et développement de conception de puces. Par exemple, de nombreux constructeurs automobiles ont établi des partenariats stratégiques avec des fabricants de puces d’IA pour la conduite autonome, tels que Black Sesame et Horizon. De plus, ils pénètrent directement dans la chaîne d'approvisionnement des semi-conducteurs et introduisent la conception de puces dans l'usine de moteurs principale. Ce modèle est appelé modèle « OEM-Foundry-Direct », et les sociétés représentatives incluent Tesla, BYD, etc. 18) Positionnement sur le marché : Quel type de puce de contrôle principale choisir, vous devez d'abord examiner le positionnement sur le marché du contrôleur de domaine : quelles fonctions il entend mettre en œuvre et dans quelle gamme de prix il sera utilisé pour la configuration. Si l'objectif est de faire de la conduite assistée et de fabriquer un produit L1~L2, et que c'est en volume, vous serez très sensible au coût lors de la sélection des chips. Pour de tels produits de contrôle de domaine, choisissez simplement des puces de milieu à bas de gamme. "Si l'objectif est de créer une voiture autonome dans des scénarios limités L4, alors les clients peuvent être plus enclins à créer un produit personnalisé. Par exemple, si nous nous positionnons comme Robotaxi, nous prévoyons d'adopter une opération modèle , le but est d'abord de peaufiner l'algorithme. Son volume ne sera pas particulièrement important, donc lors du choix d'une puce, il est relativement moins sensible au coût, mais les performances doivent être suffisamment bonnes et suffisamment stables. 19) Puce. Feuille de route : Liu Wei, directeur général adjoint de Neusoft Reach, a mentionné : « Du point de vue de la coopération avec les fabricants de puces, cela dépendra s'il s'agit d'un fabricant de puces grand public et s'il dispose d'une feuille de route de produits continue. Par exemple, certains fabricants de puces peuvent avoir développé une bonne puce, mais elle n'a pas été mise à jour à l'avenir. Il y aura alors de gros problèmes dans l'itération et la mise à niveau des produits ultérieurs basés sur cette puce " De même, Joyson. Electronics Intelligent Driving. Li Maoqing, responsable de la conception du système, a également mentionné le même point de vue : « En plus de prêter attention aux performances fonctionnelles de la puce elle-même lors de la sélection de solutions matérielles dans la conception du système de contrôleur de domaine, vous avez également besoin Pour bien comprendre la feuille de route des produits de l'entreprise de puces et si elle est flexible Pour les séries de puces familiales, les puces ultérieures peuvent-elles être mises à niveau sur la plate-forme matérielle PIN à PIN, améliorant ainsi les performances matérielles tout en réduisant les coûts de développement ? 20) Écologie des puces (chaîne d’outils) : Que l’ensemble de la chaîne d’outils logiciels de la puce ou le développement de certains algorithmes puissent répondre aux besoins des clients. En d'autres termes, quelle est l'écologie de la puce ? L'existence d'un bon écosystème capable d'aider les clients à mettre en œuvre un développement pratique est également l'une des considérations importantes pour les OEM ou les niveaux 1 lors du choix des puces. L'écosystème de puces de NVIDIA est relativement leader dans l'industrie. Son écosystème comprend des développeurs, des logiciels d'application disponibles et de riches outils et bibliothèques :
Sur la base des facteurs importants mentionnés ci-dessus dans le processus de sélection des contrôleurs de domaine de conduite autonome, nous avons effectué une analyse statistique des puces de contrôleur les plus courantes sur le marché. Le tableau comparatif suivant des résultats d'analyse est produit :
Le directeur R&D matériel de Zhixing Technology a expliqué : « De nombreux OEM utilisent désormais la puce Orin de NVIDIA. En plus d'être une plate-forme de grande puissance de calcul, une autre raison importante est qu'elle peut fournir l'intégralité du logiciel. Des chaînes d'outils, voire du code sous-jacent et des codes d'algorithme, peuvent être fournies ; les développeurs peuvent y apporter davantage d'adaptations pour mieux développer une plate-forme informatique de conduite autonome avancée qui peut être mise en œuvre en plus de la sélection des puces. . "
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI