
Maison >Périphériques technologiques >IA >Le robot se construit aussi facilement que des blocs de construction
Le robot se construit aussi facilement que des blocs de construction

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-17 17:10:091553parcourir
Quoi, les robots ont évolué au point de pouvoir se construire eux-mêmes ? !
Des chercheurs du Massachusetts Institute of Technology (MIT) étaient si imaginatifs qu'ils ont imaginé cette scène :
Le robot n°1 était occupé à ramasser des pièces et à assembler quelque chose.
Au bout d'un moment, le robot identique n°2 est né sur place !
Ce n'est pas encore fini - le robot n°2 vient d'arriver dans ce monde, et il était immédiatement aussi agile que le n°1, puis il s'est « mis » deux accessoires, oh non, des accessoires.
Emm... Il semble que le robot "poupée matriochka" soit vraiment devenu réalité maintenant.

Les chercheurs du MIT ont souligné :
En plus de se cloner, ce type de robot peut également construire des robots plus grands en couches.
Selon cette idée, lors de la construction future de grands bâtiments ou de gros équipements mécaniques, il sera peut-être possible de construire de petits modules étape par étape comme des blocs de construction, sans avoir à construire une machine-outil géante à côté.
Cela peut grandement améliorer l’efficacité de la construction !
Des articles de recherche pertinents ont été publiés dans la sous-revue Nature Communications Engineering.
Principalement grâce au module "intelligent"
Il est facile de voir d'après l'animation précédente que ce robot peut se cloner si rapidement principalement grâce à ses "parties", ont déclaré les chercheurs. C'est Voxel.
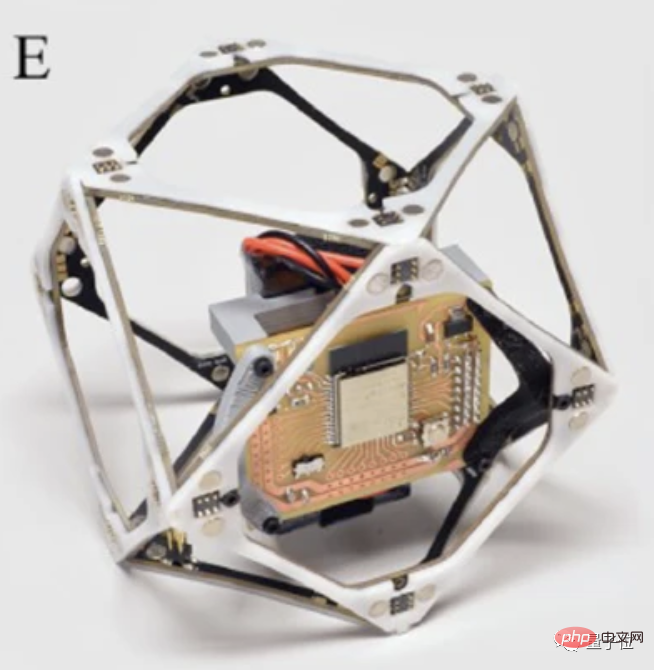
Le mot Voxel est l'abréviation de Volume Pixel On peut simplement le comprendre comme un module.
Quant à la raison pour laquelle le module grandit ainsi, les chercheurs disent que l'inspiration vient du réseau cristallin, qui est la structure spatiale dans laquelle les atomes sont régulièrement disposés dans un cristal. La structure cuboctaédrique présente les avantages d'une faible densité et d'une rigidité élevée, et est également facile à assembler et à démonter.
Les modules précédents étaient essentiellement purement mécaniques, et en plus des structures mécaniques, ces modules disposent également de systèmes de contrôle intelligents.
Le module est équipé d'une batterie, d'un processeur central, d'un actionneur, etc., lui permettant de se déplacer avec souplesse et de naviguer de manière autonome.
Il y a de nombreux électro-aimants sur le bord du module, de sorte que deux modules adjacents peuvent être fermement connectés. Chaque ensemble de connexions face à face peut transmettre un courant de 8 A et une force de traction de 50 N à une tension de 10 V.
Mais le mouvement seul ne suffit pas. Le processus par lequel les robots sélectionnent des pièces et construisent de nouveaux robots implique également des actions de saisie.
L'équipe de recherche a donc également conçu un "poignet" pour le robot.

Ce "joint" est plus flexible que les autres modules, ce qui permet au robot de "ramasser" plus facilement les pièces et de les assembler en couches.
À ce stade, une question se pose encore : comment saisir les bons modules et épeler dans l'ordre la nouvelle structure souhaitée ?
Tout d'abord, le système informatique du robot discrétisera automatiquement la géométrie d'entrée en plusieurs blocs de construction hiérarchiques ordonnés via un compilateur basé sur la forme cible donnée.
Ensuite, le système analysera également la meilleure séquence d'assemblage pour améliorer l'efficacité et éviter toute confusion dans le processus de « bloc de construction ».
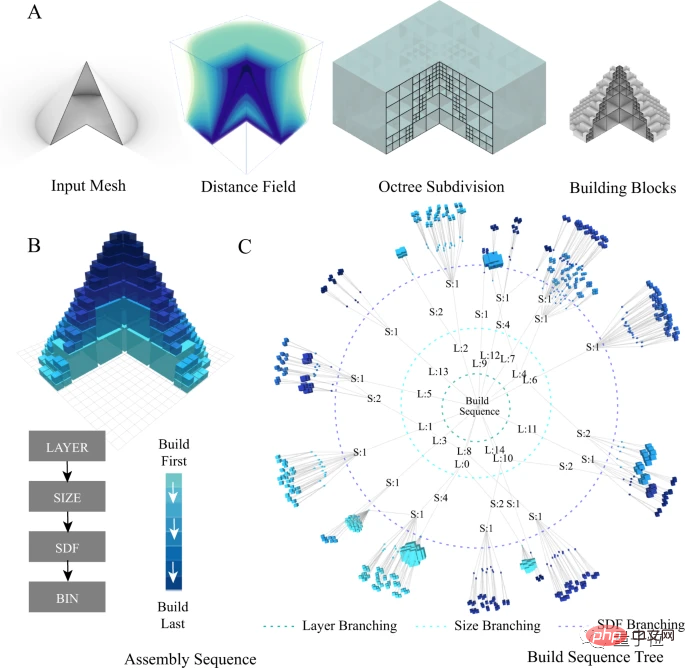
Ensuite, le robot peut se cloner de manière ordonnée et même construire un robot plus grand.
Cependant, les chercheurs ont également souligné que lors de l'opération réelle, ils ont constaté que les composants n'étaient pas assez flexibles (l'animation au début est ce à quoi elle ressemble dans un environnement de simulation), et ils recherchent et développent actuellement des composants plus puissants. et connecteurs sensibles.
Présentation du chercheur
Le chercheur est issu du Center for Bits and Atoms du MIT et du laboratoire de recherche de l'armée américaine.
Amira Abdel-Rahman, première auteure et auteure correspondante de l'article, est actuellement doctorante au MIT. Elle est titulaire d'une maîtrise en recherche en conception technique de l'Université Harvard.

Son principal axe de recherche est d'utiliser les ordinateurs pour analyser les processus et les systèmes de fabrication.
De plus, le concepteur du concept global du système est le professeur Neil Gershenfeld, qui est actuellement directeur du MIT Center for Bit and Atomic Research. Il est également membre de l'American Physical Society.
Actuellement, le MIT Center for Bits and Atoms Research s'efforce de briser les frontières entre l'informatique et la physique classique et d'explorer comment mieux combiner les données et le matériel.
Adresse papier : https://www.nature.com/articles/s44172-022-00034-3
Lien de référence : https://techcrunch.com/2022/11/22/researchers-are-building-robots -qui-peuvent-se-construire/
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI