
Maison >Périphériques technologiques >IA >Un drone capable de résister aux vents violents ? Caltech utilise 12 minutes de données de vol pour apprendre aux drones à voler dans le vent
Un drone capable de résister aux vents violents ? Caltech utilise 12 minutes de données de vol pour apprendre aux drones à voler dans le vent

- WBOYavant
- 2023-04-09 23:51:081303parcourir
Lorsque le vent est suffisamment fort pour souffler sur le parapluie, le drone est stable, comme ceci :
Voler dans le vent fait partie du vol dans les airs à un niveau élevé, lorsque la vitesse du vent peut le faire. défier les pilotes lorsqu'ils font atterrir leur avion ; à plus petite échelle, les rafales de vent peuvent également affecter le vol du drone.
Actuellement, les drones volent dans des conditions contrôlées, sans vent, ou sont pilotés par des humains à l'aide de télécommandes. Les drones sont contrôlés par les chercheurs pour voler en formations à ciel ouvert, mais ces vols sont généralement effectués dans des conditions et des environnements idéaux.
Cependant, pour qu'un drone puisse effectuer de manière autonome des tâches nécessaires mais routinières, comme la livraison de colis, le drone doit être capable de s'adapter aux conditions de vent en temps réel.
Pour donner aux drones une meilleure maniabilité lorsqu'ils volent dans le vent, une équipe d'ingénieurs de Caltech a développé Neural-Fly, un outil d'intelligence artificielle qui permet aux drones de voler. Les humains et les machines restent agiles dans des conditions venteuses, et vient de mettre à jour quelques clés Les paramètres peuvent aider le drone à faire face en temps réel à des conditions de vent nouvelles et inconnues.
Au début de l'article, nous avons déjà vu la capacité de résistance au vent des drones. Ci-dessous, un drone quadricoptère Avec l'aide des outils développés dans cette recherche, il peut accomplir la tâche lorsque la vitesse du vent atteint 27. miles/heure. Fonctionnement de la navette en forme de 8 :
Regardez le drone voler dans le vent sous un angle différent :
Pour que le drone puisse faire la navette sous différentes vitesses de vent, les données sont La recherche n'a pas nécessité beaucoup de données, et après seulement 12 minutes de données de vol, un drone quadricoptère autonome équipé de Neural-Fly a appris à réagir aux vents forts. "La quantité de données utilisée est très faible", a déclaré Michael O'Connell, étudiant diplômé du département d'aéronautique et d'astronautique de Caltech et l'un des auteurs de l'article.
La recherche a été publiée mercredi dans la revue Science Robotics.
- Adresse papier : https://www.science.org/doi/10.1126/scirobotics.abm6597
- Adresse arXiv : https://arxiv.org/pdf/2205.06908.pdf
Dans l'entraînement expérimental Neural-Fly, le drone a volé dans une soufflerie avec six vitesses de vent différentes, la plus rapide étant de 13,4 mph.
À partir de ces données, l'équipe a créé un réseau neuronal profond et a ensuite permis à son véhicule de manœuvrer habilement dans la même soufflerie, comme zoomer sur une porte en forme de huit ou traverser deux ovales. portes . Le drone s’est déplacé plus rapidement lors des tests qu’il ne l’avait fait lors de l’entraînement : environ 27 miles par heure. Il s'agit de la vitesse maximale du vent que la soufflerie peut générer, a déclaré Guanya Shi, auteur du journal et étudiant diplômé à Caltech. En plus de ne nécessiter qu’une petite quantité de données, le logiciel ne fonctionne que sur un Raspberry Pi, un appareil informatique peu coûteux.
L'auteur correspondant Soon-Jo Chung, professeur d'aérospatiale, de contrôle et de systèmes dynamiques à Caltech, a déclaré que les taux d'erreur observés étaient meilleurs que ceux de la technologie SOTA existante et que les performances de vol des drones équipés du nouveau système étaient meilleures. 2,5 à 4 fois.
La photo ci-dessous, de gauche à droite, représente Shi Guanya, Soon-Jo Chung et Michael O'Connell. Il convient de féliciter que Shi Guanya rejoindra l'Institut de robotique de la School of Computing de l'Université Carnegie Mellon en tant que professeur assistant en septembre 2023.
Les chercheurs ont déclaré que cette technologie serait utilisée à l'avenir pour la livraison par drone ou les voitures volantes.
Aperçu de la technologie Neural-Fly
Pour que les véhicules aériens sans pilote (UAV) parviennent à une commercialisation soutenue, il est essentiel d'effectuer des manœuvres de vol sûres et précises dans des vents dynamiques à grande vitesse. Cependant, il est difficile de concevoir des contrôleurs de robot efficaces à l’aide des méthodes de conception de contrôle traditionnelles, car la relation entre les différentes conditions de vent et leur impact sur la maniabilité des drones n’a pas été étudiée en profondeur.
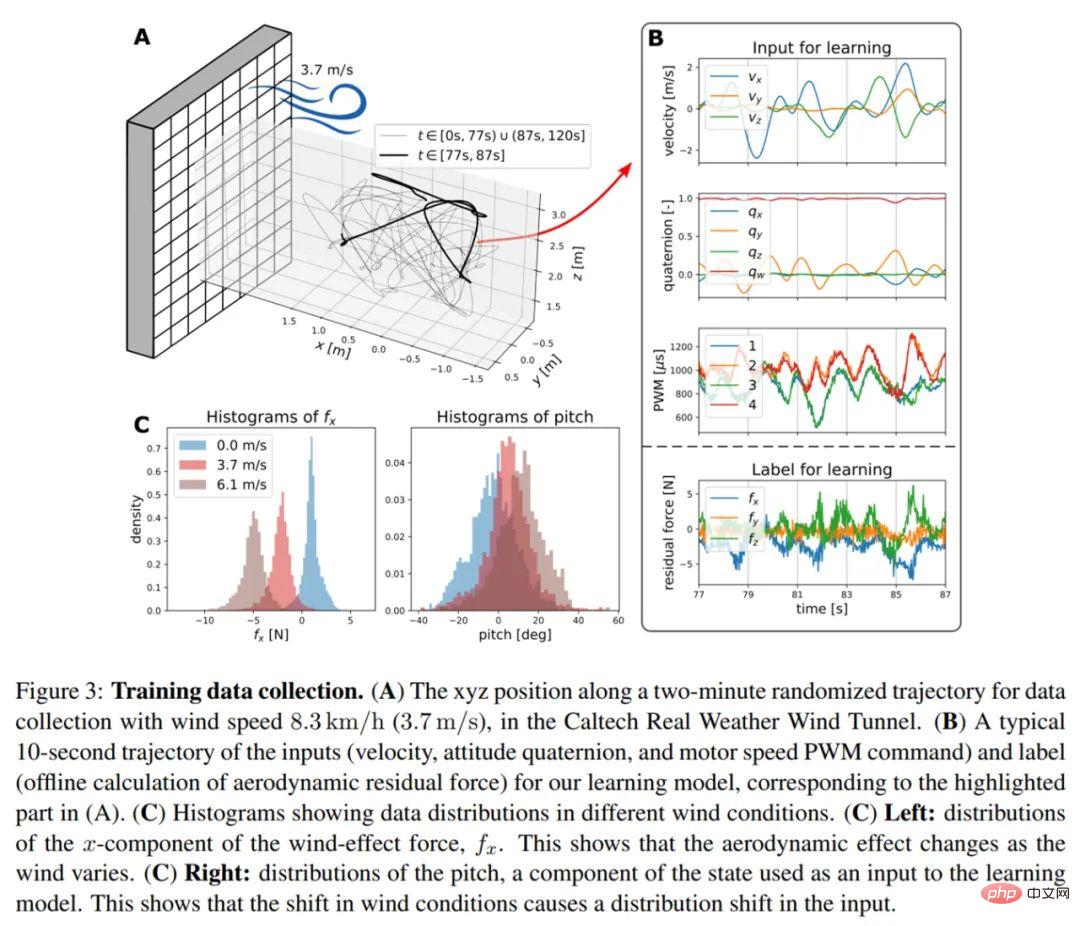
« Neural-Fly » proposé par des chercheurs du California Institute of Technology est une méthode basée sur les données. En tant que contrôleur de suivi de trajectoire basé sur l'apprentissage profond, il peut apprendre à s'adapter rapidement aux conditions de vent qui changent rapidement. La figure 3(A) ci-dessous montre le processus de collecte de données ; 3(B) montre l'entrée et les étiquettes des données d'entraînement sous une vitesse de vent de 13,3 km/h (3,7 m/s) ; étiquettes sous différentes conditions de vent. Distribution des données étiquetées.
Adaptation en ligne + méta-apprentissage hors ligne
La figure 2 ci-dessous est un aperçu de la méthode Neural-Fly, montrant ses progrès en matière de contrôle de vol adaptatif et de contrôle de robot basé sur l'apprentissage profond. Neural-Fly permet un suivi des erreurs de position au niveau centimétrique pour des trajectoires flexibles et difficiles dans des conditions de vent dynamiques pour les drones standard. Plus précisément, cette méthode se compose principalement de deux parties, à savoir l'étape d'apprentissage hors ligne et l'étape de contrôle adaptatif en ligne pour l'apprentissage en ligne en temps réel.
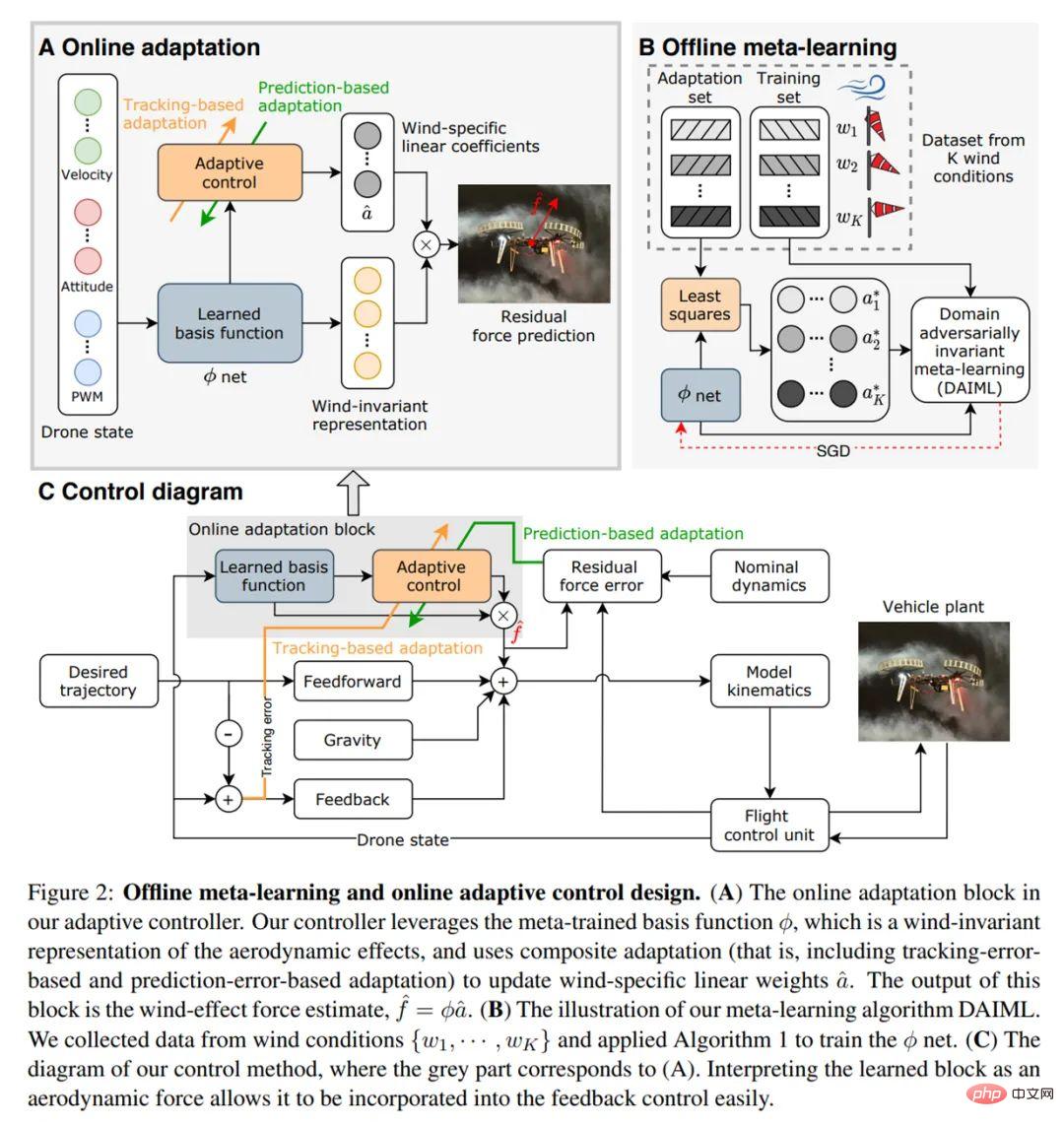
phase d'apprentissage hors ligne, les chercheurs ont développé un méta-apprentissage à invariance contradictoire de domaine (DAIML), qui apprend l'aérodynamique et les conditions de vent de manière efficace en termes de données. Représentation indépendante d'un réseau de neurones profonds (DNN). La représentation s'adapte aux différentes conditions de vent en mettant à jour un ensemble de coefficients linéaires générés par un réseau neuronal profond hybride.
DAIML est également efficace en matière de données,n'utilisant qu'un total de 12 minutes de données de vol dans 6 conditions de vent différentes pour entraîner le réseau neuronal profond. DAIML contient plusieurs fonctionnalités clés qui améliorent non seulement l'efficacité des données, mais peuvent également être informées par des étapes de contrôle adaptatif en ligne en aval.
Il convient de noter que DAIML utilise la normalisation spectrale pour contrôler la propriété Lipschitz des réseaux de neurones profonds afin d'améliorer la généralisation aux données invisibles et de fournir une stabilité et une robustesse en boucle fermée. De plus, DAIML utilise un réseau discriminant pour garantir que la représentation apprise est invariante au vent et que les informations liées au vent ne sont incluses que dans les coefficients linéaires adaptés à l'étape de contrôle en ligne.Pour la
phase de contrôle adaptatif en ligne, les chercheurs ont développé une loi de contrôle adaptative composite régularisée, basée sur une compréhension de base de la façon dont les représentations apprises interagissent avec les systèmes de contrôle en boucle fermée et bénéficie d'un support théorique strict.
Plus précisément, la loi adaptative utilise une combinaison du terme d'erreur de suivi de position et du terme d'erreur de prédiction aérodynamique pour mettre à jour les coefficients linéaires liés au vent. Cette approche garantit effectivement une adaptation stable et rapide à toutes les conditions de vent et une robustesse à un apprentissage imparfait. Bien que cette loi de contrôle adaptative puisse être utilisée avec de nombreux modèles appris, la représentation précise apprise de DAIML contribue à améliorer encore la vitesse d'adaptation.Résultats expérimentaux
En termes d'effet de Neural-Fly, il est 66% meilleur que le contrôleur de suivi non linéaire en moyenne, 42% meilleur que le contrôleur adaptatif L_1 et 42% meilleur que le non linéaire incrémentiel Le contrôleur d'inversion dynamique (INDI) a augmenté de 35 %. Tous ces résultats ont été obtenus à l'aide d'un matériel de drone quadricoptère standard tout en exécutant le contrôle d'attitude réglé par défaut du PX4.
Les performances de suivi de Neural-Fly sont compétitives même par rapport aux travaux connexes qui n'ont aucune interférence de vent externe et utilisent un matériel plus complexe, tel que des capteurs optiques intégrés qui nécessitent 10 fois la fréquence de contrôle et utilisent un retour de vitesse du moteur à courant continu.
Le tableau 1 ci-dessous montre les statistiques de suivi des erreurs de différentes méthodes dans différentes conditions de vent.
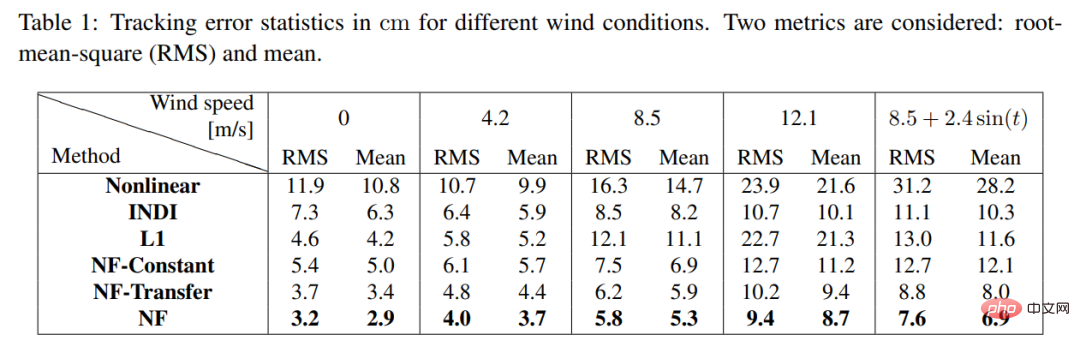
Neural-Fly-Transfer démontre sa robustesse aux changements de configuration des drones et aux inadéquations de modèles. Les méthodes NF-Constant, L_1 et INDI s'adaptent toutes directement à des dynamiques inconnues sans assumer la structure physique sous-jacente, elles ont des performances similaires.
Enfin, les chercheurs ont démontré que Neural-Fly peut mettre en œuvre une série de fonctions, permettant au drone de suivre une trajectoire et de voler agilement à travers des portes à basse altitude dans des conditions de vent fort, comme le montre la figure 1 ci-dessous.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI