
Maison >Opération et maintenance >exploitation et maintenance Linux >qu'est-ce que la pile Linux
qu'est-ce que la pile Linux

- WBOYoriginal
- 2022-07-08 16:41:262563parcourir
Sous Linux, la pile est une structure de données en série ; la caractéristique de cette structure de données est le dernier entré, premier sorti. Les données ne peuvent être poussées et extraites qu'à une extrémité de la série. La pile sous Linux peut être divisée en processus. pile, pile de threads, pile de noyau et pile d'interruptions.

L'environnement d'exploitation de ce tutoriel : système linux7.3, ordinateur Dell G3.
Qu'est-ce qu'une pile Linux ?
Stack (stack) est une structure de données série. La caractéristique de cette structure de données est LIFO (Last In First Out). Les données ne peuvent être poussées et extraites qu'à une extrémité de la chaîne (appelée haut de la pile).
Pile de processus
Pile de threads
Pile de noyau
Pile d'interruption
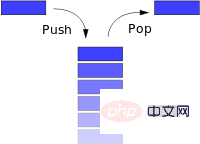
La plupart des architectures de processeur ont implémenté des piles matérielles. Il existe un registre de pointeur de pile dédié et des instructions matérielles spécifiques pour terminer l'opération push/pop. Par exemple, sur l'architecture ARM, le pointeur R13 (SP) est le registre du pointeur de pile, PUSH est l'instruction d'assemblage pour pousser sur la pile et POP est l'instruction d'assemblage pour faire éclater la pile.
【Lecture étendue】Introduction aux registres ARM
Le processeur ARM dispose de 37 registres. Ces registres sont disposés en groupes partiellement superposés. Chaque mode de processeur possède un ensemble différent de registres. Les registres groupés permettent un changement de contexte rapide pour gérer les exceptions du processeur et les opérations privilégiées.
Les registres suivants sont fournis :
Trente registres à usage général de 32 bits :
Il existe quinze registres à usage général, ce sont r0-r12, sp, lr
sp (r13) est un pointeur de pile. Les compilateurs C/C++ utilisent toujours sp comme pointeur de pile
lr (r14) pour stocker l'adresse de retour lors de l'appel d'un sous-programme. Si l'adresse de retour est stockée sur la pile, lr peut être utilisé comme registre à usage général
Compteur de programme (pc) : registre d'instructions
Registre d'état d'application (APSR) : contient l'unité logique arithmétique (ALU) status flag Copy
Current Program Status Register (CPSR) : stocke l'indicateur APSR, le mode actuel du processeur, l'indicateur de désactivation d'interruption, etc.
Enregistré le registre d'état du programme (SPSR) : lorsqu'une exception se produit, utilisez SPSR pour stocker CPSR
Ce qui précède est le principe et la mise en œuvre de la pile. Voyons maintenant ce que fait la pile. Le rôle de la pile peut se refléter sous deux aspects : l’appel de fonctions et la prise en charge multitâche.
1. Appel de fonction
Nous savons qu'un appel de fonction comporte les trois processus de base suivants :
Transmission des paramètres d'appel
Gestion de l'espace des variables locales
Retour de fonction
Fonction L'appel doit être efficace, et le stockage des données dans les registres généraux du CPU ou dans la mémoire RAM est sans aucun doute le meilleur choix. En prenant comme exemple la transmission des paramètres d'appel, nous pouvons choisir d'utiliser les registres généraux du CPU pour stocker les paramètres. Cependant, le nombre de registres à usage général est limité. Lorsque des appels de fonctions imbriquées se produisent, les sous-fonctions utilisant à nouveau les registres à usage général d'origine provoqueront inévitablement des conflits. Par conséquent, si vous souhaitez l'utiliser pour transmettre des paramètres, vous devez enregistrer la valeur de registre d'origine avant d'appeler la sous-fonction, puis restaurer la valeur de registre d'origine lorsque la sous-fonction se termine.
Le nombre de paramètres d'appel d'une fonction est généralement relativement faible, les registres à usage général peuvent donc répondre à certains besoins. Cependant, le nombre et l'espace occupés par les variables locales sont relativement importants et il est difficile de s'appuyer sur des registres généraux limités. Par conséquent, nous pouvons utiliser certaines zones de mémoire RAM pour stocker des variables locales. Mais quel est le lieu de stockage approprié ? Il est nécessaire d’éviter les conflits lors de l’appel de fonctions imbriquées et de se concentrer sur l’efficacité.
Dans ce cas, la pile constitue sans aucun doute une bonne solution. 1. En cas de conflits dans le transfert de paramètres du registre général, nous pouvons temporairement pousser le registre général sur la pile avant d'appeler la sous-fonction après l'appel de la sous-fonction, retirer le registre enregistré ; 2. Pour demander de l'espace pour les variables locales, il vous suffit de déplacer le pointeur supérieur de la pile vers le bas ; de déplacer le pointeur supérieur de la pile vers l'arrière pour terminer la libération d'espace des variables locales ; il suffit de placer l'adresse de retour dans la pile avant d'appeler la sous-fonction. Une fois l'appel de la sous-fonction terminé, placez l'adresse de retour de la fonction sur le pointeur du PC, ce qui termine le retour de l'appel de fonction ; Les trois processus de base de l'appel de fonction ci-dessus font évoluer le processus d'enregistrement d'un pointeur de pile. Chaque fois qu'une fonction est appelée, un pointeur de pile est fourni. Même si les fonctions sont appelées dans des boucles imbriquées, tant que les pointeurs de pile de fonctions correspondants sont différents, il n'y aura pas de conflit.
【Lecture étendue】 : Cadre de pile de fonctions
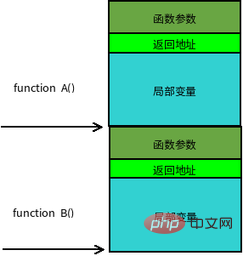
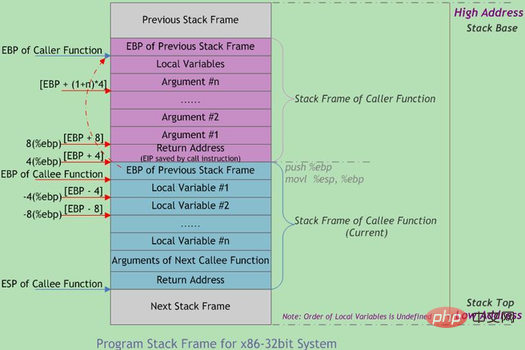
Les appels de fonction sont souvent imbriqués. En même temps, il y aura des informations sur plusieurs fonctions dans la pile. Chaque fonction inachevée occupe une zone continue indépendante appelée cadre de pile. Le cadre de pile stocke les paramètres de fonction, les variables locales et les données nécessaires pour restaurer le cadre de pile précédent, etc. L'ordre de poussée dans la pile lorsqu'une fonction est appelée est :
paramètres réels N ~ 1 → adresse de retour de la fonction appelante → fonction appelante pointeur de base de cadre EBP → La variable locale de fonction appelée 1~N
La limite du cadre de pile est définie par le pointeur d'adresse de base du cadre de pile EBP et le pointeur de pile EBP pointe vers le bas du cadre de pile actuel (adresse haute. ) et est fixe dans le cadre de pile actuel ; ESP pointe vers le haut du cadre de pile actuel (adresse basse), ESP se déplacera à mesure que les données seront poussées et extraites de la pile lors de l'exécution du programme. Par conséquent, la plupart des accès aux données dans la fonction sont basés sur EBP. La disposition typique de la mémoire de la pile d'appels de fonctions est illustrée dans la figure ci-dessous :
2. Prise en charge multitâche
Cependant, la signification de la pile n'est pas seulement les appels de fonctions. Ce n'est qu'avec son existence que le multi peut être utilisé. -le mode de tâche du système d'exploitation soit construit. Prenons l'exemple de l'appel de la fonction principale. La fonction principale contient un corps de boucle infinie, la fonction A est appelée en premier, puis la fonction B est appelée.
func B():
return;
func A():
B();
func main():
while (1)
A();Imaginez que dans une situation de monoprocesseur, le programme restera pour toujours dans cette fonction principale. Même s'il y a une autre tâche en attente, le programme ne peut pas passer à une autre tâche à partir de la fonction principale. Parce que s'il s'agit d'une relation d'appel de fonction, il s'agit essentiellement toujours d'une tâche de la fonction principale et elle ne peut pas être considérée comme une commutation multitâche. À ce stade, la tâche de fonction principale elle-même est en fait liée à sa pile. Quel que soit le degré d'imbrication des appels de fonction, le pointeur de pile se déplace dans la portée de cette pile.
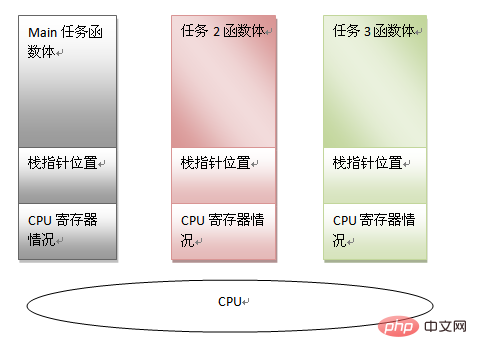
On peut voir qu'une tâche peut être caractérisée par les informations suivantes :
code du corps de la fonction principale
pointeur de pile de la fonction principale
informations actuelles du registre du processeur
Si nous pouvons enregistrer le informations ci-dessus, vous pouvez forcer le processeur à gérer d’autres tâches. Tant que vous souhaitez continuer à exécuter cette tâche principale à l'avenir, vous pouvez restaurer les informations ci-dessus. Avec de telles conditions préalables, le multitâche a la base de l'existence, et une autre signification de l'existence de la pile peut également être vue. En mode multitâche, lorsque le planificateur juge nécessaire de changer de tâche, il lui suffit de sauvegarder les informations sur la tâche (c'est-à-dire les trois éléments mentionnés ci-dessus). Restaurez l'état d'une autre tâche, puis accédez au dernier emplacement d'exécution pour reprendre l'exécution.
On peut voir que chaque tâche a son propre espace de pile. En raison de l'espace de pile indépendant, dans un souci de réutilisation du code, différentes tâches peuvent même mélanger les corps de fonctions des tâches elles-mêmes. Par exemple, une fonction principale peut avoir. deux instances de tâche. Après cela, le cadre du système d'exploitation a également été formé. Par exemple, lorsqu'une tâche appelle sleep() et attend, elle peut activement céder le processeur à d'autres tâches, ou la tâche du système d'exploitation en temps partagé sera forcée lorsque la tranche de temps est épuisée. Abandonnez le processeur. Quelle que soit la méthode utilisée, trouvez simplement un moyen de changer l'espace contextuel de la tâche et de changer de pile.
[Lecture approfondie] : La relation entre les tâches, les threads et les processus
La tâche est un concept abstrait, qui fait référence à une activité réalisée par un logiciel. Les threads sont les actions requises pour terminer la tâche à laquelle les processus font référence ; est le nom collectif des ressources nécessaires pour mener à bien cette action ; il existe une métaphore vivante sur la relation entre les trois :
Tâche = livraison
Thread = conduire un camion de livraison
Planification du système = décider qu'est-ce qui est approprié Quel camion de livraison conduire
Process = route + station-service + camion de livraison + garage
Combien y a-t-il de piles sous Linux ? Quels sont les emplacements mémoire des différentes piles ?
Après avoir présenté le principe de fonctionnement et le but de la pile, nous revenons au noyau Linux. Le noyau divise la pile en quatre types :
Pile de processus
Pile de threads
Pile de noyau
Pile d'interruption
1. Pile de processus
La pile de processus appartient au utilisateur La pile de modes et l'espace d'adressage virtuel du processus (espace d'adressage virtuel) sont étroitement liés. Commençons par comprendre ce qu'est l'espace d'adressage virtuel : sur une machine 32 bits, la taille de l'espace d'adressage virtuel est de 4G. Ces adresses virtuelles sont mappées à la mémoire physique via des tables de pages, qui sont gérées par le système d'exploitation et référencées par le matériel de l'unité de gestion de mémoire (MMU) du processeur. Chaque processus possède son propre ensemble de tables de pages, de sorte que chaque processus semble avoir un accès exclusif à l'intégralité de l'espace d'adressage virtuel.
Linux 内核将这 4G 字节的空间分为两部分,将最高的 1G 字节(0xC0000000-0xFFFFFFFF)供内核使用,称为 内核空间。而将较低的3G字节(0x00000000-0xBFFFFFFF)供各个进程使用,称为 用户空间。每个进程可以通过系统调用陷入内核态,因此内核空间是由所有进程共享的。虽然说内核和用户态进程占用了这么大地址空间,但是并不意味它们使用了这么多物理内存,仅表示它可以支配这么大的地址空间。它们是根据需要,将物理内存映射到虚拟地址空间中使用。
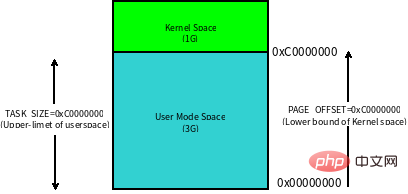
Linux 对进程地址空间有个标准布局,地址空间中由各个不同的内存段组成 (Memory Segment),主要的内存段如下:
程序段 (Text Segment):可执行文件代码的内存映射
数据段 (Data Segment):可执行文件的已初始化全局变量的内存映射
BSS段 (BSS Segment):未初始化的全局变量或者静态变量(用零页初始化)
堆区 (Heap) : 存储动态内存分配,匿名的内存映射
栈区 (Stack) : 进程用户空间栈,由编译器自动分配释放,存放函数的参数值、局部变量的值等
映射段(Memory Mapping Segment):任何内存映射文件

而上面进程虚拟地址空间中的栈区,正指的是我们所说的进程栈。进程栈的初始化大小是由编译器和链接器计算出来的,但是栈的实时大小并不是固定的,Linux 内核会根据入栈情况对栈区进行动态增长(其实也就是添加新的页表)。但是并不是说栈区可以无限增长,它也有最大限制 RLIMIT_STACK (一般为 8M),我们可以通过 ulimit 来查看或更改 RLIMIT_STACK 的值。
【扩展阅读】:如何确认进程栈的大小
我们要知道栈的大小,那必须得知道栈的起始地址和结束地址。栈起始地址 获取很简单,只需要嵌入汇编指令获取栈指针 esp 地址即可。栈结束地址 的获取有点麻烦,我们需要先利用递归函数把栈搞溢出了,然后再 GDB 中把栈溢出的时候把栈指针 esp 打印出来即可。代码如下:
/* file name: stacksize.c */
void *orig_stack_pointer;
void blow_stack() {
blow_stack();
}
int main() {
__asm__("movl %esp, orig_stack_pointer");
blow_stack();
return 0;
}$ g++ -g stacksize.c -o ./stacksize $ gdb ./stacksize (gdb) r Starting program: /home/home/misc-code/setrlimit Program received signal SIGSEGV, Segmentation fault. blow_stack () at setrlimit.c:4 4 blow_stack(); (gdb) print (void *)$esp $1 = (void *) 0xffffffffff7ff000 (gdb) print (void *)orig_stack_pointer $2 = (void *) 0xffffc800 (gdb) print 0xffffc800-0xff7ff000 $3 = 8378368 // Current Process Stack Size is 8M
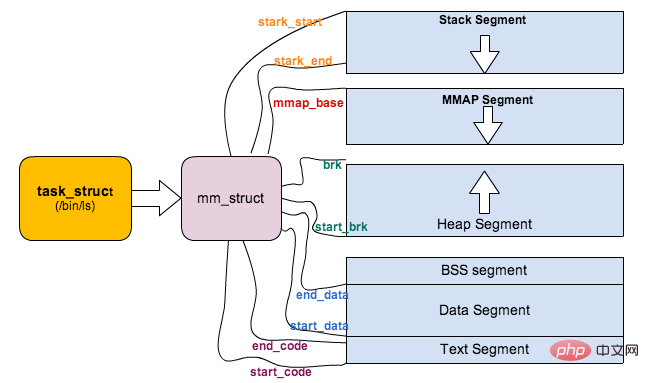
上面对进程的地址空间有个比较全局的介绍,那我们看下 Linux 内核中是怎么体现上面内存布局的。内核使用内存描述符来表示进程的地址空间,该描述符表示着进程所有地址空间的信息。内存描述符由 mm_struct 结构体表示,下面给出内存描述符结构中各个域的描述,请大家结合前面的 进程内存段布局 图一起看:
struct mm_struct {
struct vm_area_struct *mmap; /* 内存区域链表 */
struct rb_root mm_rb; /* VMA 形成的红黑树 */
...
struct list_head mmlist; /* 所有 mm_struct 形成的链表 */
...
unsigned long total_vm; /* 全部页面数目 */
unsigned long locked_vm; /* 上锁的页面数据 */
unsigned long pinned_vm; /* Refcount permanently increased */
unsigned long shared_vm; /* 共享页面数目 Shared pages (files) */
unsigned long exec_vm; /* 可执行页面数目 VM_EXEC & ~VM_WRITE */
unsigned long stack_vm; /* 栈区页面数目 VM_GROWSUP/DOWN */
unsigned long def_flags;
unsigned long start_code, end_code, start_data, end_data; /* 代码段、数据段 起始地址和结束地址 */
unsigned long start_brk, brk, start_stack; /* 栈区 的起始地址,堆区 起始地址和结束地址 */
unsigned long arg_start, arg_end, env_start, env_end; /* 命令行参数 和 环境变量的 起始地址和结束地址 */
...
/* Architecture-specific MM context */
mm_context_t context; /* 体系结构特殊数据 */
/* Must use atomic bitops to access the bits */
unsigned long flags; /* 状态标志位 */
...
/* Coredumping and NUMA and HugePage 相关结构体 */
};
【扩展阅读】:进程栈的动态增长实现
进程在运行的过程中,通过不断向栈区压入数据,当超出栈区容量时,就会耗尽栈所对应的内存区域,这将触发一个 缺页异常 (page fault)。通过异常陷入内核态后,异常会被内核的 expand_stack() 函数处理,进而调用 acct_stack_growth() 来检查是否还有合适的地方用于栈的增长。
如果栈的大小低于 RLIMIT_STACK(通常为8MB),那么一般情况下栈会被加长,程序继续执行,感觉不到发生了什么事情,这是一种将栈扩展到所需大小的常规机制。然而,如果达到了最大栈空间的大小,就会发生 栈溢出(stack overflow),进程将会收到内核发出的 段错误(segmentation fault) 信号。
动态栈增长是唯一一种访问未映射内存区域而被允许的情形,其他任何对未映射内存区域的访问都会触发页错误,从而导致段错误。一些被映射的区域是只读的,因此企图写这些区域也会导致段错误。
二、线程栈
从 Linux 内核的角度来说,其实它并没有线程的概念。Linux 把所有线程都当做进程来实现,它将线程和进程不加区分的统一到了 task_struct 中。线程仅仅被视为一个与其他进程共享某些资源的进程,而是否共享地址空间几乎是进程和 Linux 中所谓线程的唯一区别。线程创建的时候,加上了 CLONE_VM 标记,这样 线程的内存描述符 将直接指向 父进程的内存描述符。
if (clone_flags & CLONE_VM) {
/*
* current 是父进程而 tsk 在 fork() 执行期间是共享子进程
*/
atomic_inc(¤t->mm->mm_users);
tsk->mm = current->mm;
}虽然线程的地址空间和进程一样,但是对待其地址空间的 stack 还是有些区别的。对于 Linux 进程或者说主线程,其 stack 是在 fork 的时候生成的,实际上就是复制了父亲的 stack 空间地址,然后写时拷贝 (cow) 以及动态增长。然而对于主线程生成的子线程而言,其 stack 将不再是这样的了,而是事先固定下来的,使用 mmap 系统调用,它不带有 VM_STACK_FLAGS 标记。这个可以从 glibc 的 nptl/allocatestack.c 中的 allocate_stack() 函数中看到:
mem = mmap (NULL, size, prot, MAP_PRIVATE|MAP_ANONYMOUS|MAP_STACK, -1, 0);
由于线程的 mm->start_stack 栈地址和所属进程相同,所以线程栈的起始地址并没有存放在 task_struct 中,应该是使用 pthread_attr_t 中的 stackaddr 来初始化 task_struct->thread->sp(sp 指向 struct pt_regs 对象,该结构体用于保存用户进程或者线程的寄存器现场)。这些都不重要,重要的是,线程栈不能动态增长,一旦用尽就没了,这是和生成进程的 fork 不同的地方。由于线程栈是从进程的地址空间中 map 出来的一块内存区域,原则上是线程私有的。但是同一个进程的所有线程生成的时候浅拷贝生成者的 task_struct 的很多字段,其中包括所有的 vma,如果愿意,其它线程也还是可以访问到的,于是一定要注意。
三、进程内核栈
在每一个进程的生命周期中,必然会通过到系统调用陷入内核。在执行系统调用陷入内核之后,这些内核代码所使用的栈并不是原先进程用户空间中的栈,而是一个单独内核空间的栈,这个称作进程内核栈。进程内核栈在进程创建的时候,通过 slab 分配器从 thread_info_cache 缓存池中分配出来,其大小为 THREAD_SIZE,一般来说是一个页大小 4K;
union thread_union {
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};thread_union 进程内核栈 和 task_struct 进程描述符有着紧密的联系。由于内核经常要访问 task_struct,高效获取当前进程的描述符是一件非常重要的事情。因此内核将进程内核栈的头部一段空间,用于存放 thread_info 结构体,而此结构体中则记录了对应进程的描述符,两者关系如下图(对应内核函数为 dup_task_struct()):
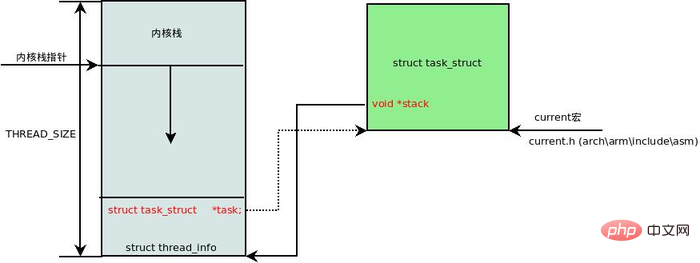
有了上述关联结构后,内核可以先获取到栈顶指针 esp,然后通过 esp 来获取 thread_info。这里有一个小技巧,直接将 esp 的地址与上 ~(THREAD_SIZE - 1) 后即可直接获得 thread_info 的地址。由于 thread_union 结构体是从 thread_info_cache 的 Slab 缓存池中申请出来的,而 thread_info_cache 在 kmem_cache_create 创建的时候,保证了地址是 THREAD_SIZE 对齐的。因此只需要对栈指针进行 THREAD_SIZE 对齐,即可获得 thread_union 的地址,也就获得了 thread_union 的地址。成功获取到 thread_info 后,直接取出它的 task 成员就成功得到了 task_struct。其实上面这段描述,也就是 current 宏的实现方法:
register unsigned long current_stack_pointer asm ("sp");
static inline struct thread_info *current_thread_info(void)
{
return (struct thread_info *)
(current_stack_pointer & ~(THREAD_SIZE - 1));
}
#define get_current() (current_thread_info()->task)
#define current get_current()四、中断栈
进程陷入内核态的时候,需要内核栈来支持内核函数调用。中断也是如此,当系统收到中断事件后,进行中断处理的时候,也需要中断栈来支持函数调用。由于系统中断的时候,系统当然是处于内核态的,所以中断栈是可以和内核栈共享的。但是具体是否共享,这和具体处理架构密切相关。
X86 上中断栈就是独立于内核栈的;独立的中断栈所在内存空间的分配发生在 arch/x86/kernel/irq_32.c 的 irq_ctx_init() 函数中 (如果是多处理器系统,那么每个处理器都会有一个独立的中断栈),函数使用 __alloc_pages 在低端内存区分配 2个物理页面,也就是8KB大小的空间。有趣的是,这个函数还会为 softirq 分配一个同样大小的独立堆栈。如此说来,softirq 将不会在 hardirq 的中断栈上执行,而是在自己的上下文中执行。

而 ARM 上中断栈和内核栈则是共享的;中断栈和内核栈共享有一个负面因素,如果中断发生嵌套,可能会造成栈溢出,从而可能会破坏到内核栈的一些重要数据,所以栈空间有时候难免会捉襟见肘。
Apprentissage recommandé : Tutoriel vidéo Linux
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!