
Maison >Problème commun >De quoi est composée l'unité mémoire d'un ordinateur ?
De quoi est composée l'unité mémoire d'un ordinateur ?

- 青灯夜游original
- 2020-10-28 13:50:193747parcourir
L'unité mémoire de l'ordinateur est composée de deux parties : la mémoire et le contrôle d'accès au timing. Les unités de mémoire sont divisées en verrous et bascules en fonction de la sensibilité de niveau et de la sensibilité des bords de l'horloge en fonction du type de terminal d'entrée, elles peuvent être divisées en type SR, type JK, type D et type T.
L'unité de mémoire est le composant de base de la mémoire. L'unité de mémoire est composée d'un stockage interne (mémoire) et d'un contrôle d'accès séquentiel.
Catégorie
1. L'une des catégories
Les unités de mémoire sont divisées en verrous et bascules en fonction de la sensibilité de niveau et de la sensibilité de front de l'horloge. Les registres peuvent être deux tableaux composés de ces deux composants. .
(1) Latch - Une unité de mémoire sensible au niveau est appelée un loquet. Par exemple, le dispositif TTL 7475 s'appuie sur le niveau haut ou bas de l'horloge d'entrée pour réaliser le déclenchement.
(2) Bascule - une unité de mémoire sensible aux bords est appelée bascule. Par exemple, le dispositif TTL 7474 est déclenché par le front montant ou descendant de l'horloge d'entrée.
Dans de nombreux matériaux, la valeur de stockage interne est transmise de manière transparente et définie par les données d'entrée, appelées verrous. Les bascules, en particulier les verrous maître-esclave, signifient que la lecture de la valeur d'entrée et la modification de la valeur de sortie sont deux événements indépendants et opaques. Cette opacité entre entrée et sortie conduit également à l’émergence du rôle du front de déclenchement d’horloge. Notez que les différentes définitions des loquets et des bascules reflètent différentes perspectives de visualisation, mais elles sont toujours liées. Revenez à la définition la plus populaire ci-dessus.
(3) Registre - fait généralement référence à un tableau composé de plusieurs bascules, utilisé pour stocker des données multi-bits ; un tableau de verrous, tel qu'un bus de données, peut également être utilisé. Notez que dans certains cas, il s'agit également d'une seule bascule ou d'un seul verrou.
2. Classification 2
Les unités mémoire peuvent également être classées selon le type de terminal d'entrée.
(1) Type SR - le type de réinitialisation défini peut être subdivisé en deux types : SR et SR. Reportez-vous à la figure 1.
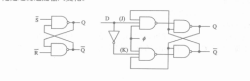
À ce moment, en fonction de l'état de la borne de sortie Q, l'état de l'unité de mémoire est soit défini par 0 au niveau de la borne d'entrée S, soit réinitialisé par 0 au niveau de la borne d'entrée S ; Borne d'entrée R : Si S, R Si les deux valent 1, l'état est maintenu cependant, S et R ne peuvent pas être 0 en même temps ; Pour le type SR au sens étroit du terme, la situation est inverse.
(2) Type JK - similaire au type SR, mais la borne d'entrée J et la borne d'entrée K peuvent être 1 (inversion d'état) ou 0 (maintenance d'état) en même temps. Le type JK peut être utilisé pour former d'autres types d'unités de mémoire.
(3) Type D - Le terminal d'entrée D fournit des données (Data). Certaines informations indiquent que D signifie retard. Lorsqu'un événement d'horloge se produit, sa valeur terminale de sortie Q est déterminée de manière transparente par la valeur d'entrée D.
(4) Type T - Vous pouvez connecter le Q du type D à D et utiliser T comme entrée du terminal d'horloge
. À ce moment, la sortie Q sera la fréquence divisée par deux du signal d'horloge T. Pour ce type T, un terminal de contrôle d'activation de division de fréquence peut également être ajouté.
Pour les unités mémoire, le plus important reste encore de stocker les bonnes données au bon endroit et au bon moment. Pour que l'unité de mémoire fonctionne de manière fiable, deux paramètres évalués utilisés pour caractériser la relation entre les données et les contraintes d'horloge : le temps de configuration des données et le temps de maintien doivent être respectés. Pour les circuits d'unité de mémoire déclenchés par le front montant de l'horloge, la période stable minimale des données avant le front montant de l'horloge (certains documents prennent également le point médian du front montant) est appelée configuration (sp), et la période après cela s'appelle hold (hp). Le facteur de retard cumulé après la mise en cascade des portes logiques détruit souvent les exigences nominales de l'unité de mémoire sp et hp, limitant ainsi la vitesse maximale de l'ensemble du système. C’est souvent un élément auquel il faut prêter une attention particulière lors de l’analyse des formes d’onde.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Quelle est l'unité de base utilisée pour exprimer la taille de la mémoire interne des ordinateurs ?
- Un logiciel informatique n'est qu'un programme informatique, n'est-ce pas ?
- Quand est née la quatrième génération d'ordinateurs au siècle dernier ?
- Le système de stockage d'un ordinateur fait généralement référence à la mémoire principale et à ce qui
- Quel équipement est nécessaire lorsque deux ordinateurs utilisent des lignes téléphoniques pour transmettre des signaux de données ?