
Maison >Périphériques technologiques >IA >Est-il difficile pour un robot de maîtriser la force de ses mains et d'effectuer le ménage en toute sécurité ? Le vice-président de l'intelligence artificielle de 1X rédige une explication détaillée
Est-il difficile pour un robot de maîtriser la force de ses mains et d'effectuer le ménage en toute sécurité ? Le vice-président de l'intelligence artificielle de 1X rédige une explication détaillée

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBoriginal
- 2024-09-02 16:34:12931parcourir


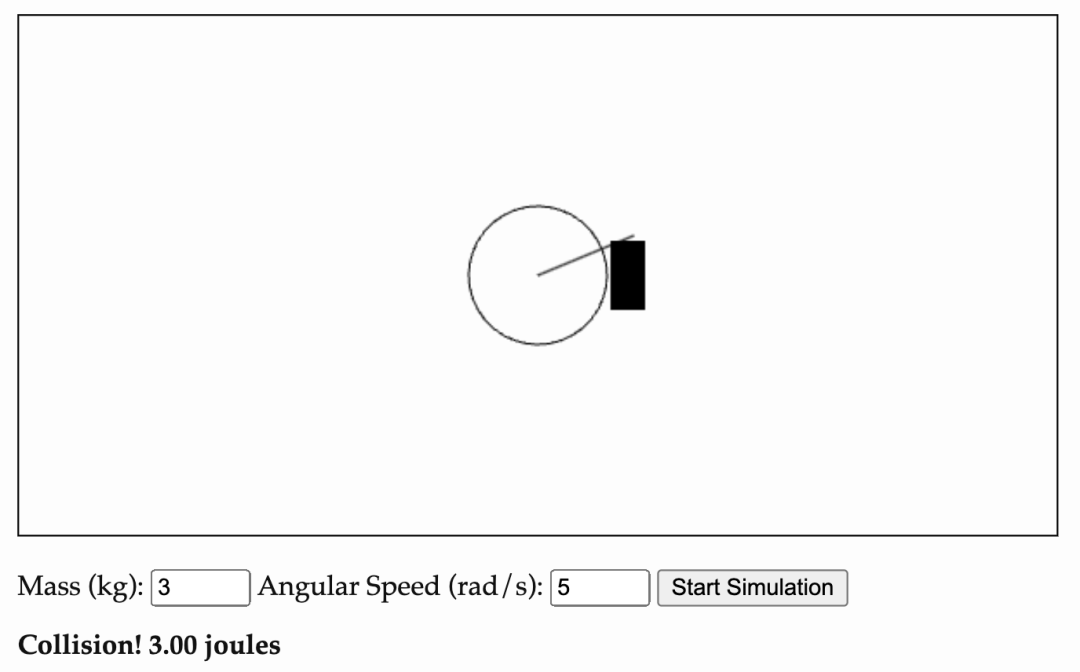
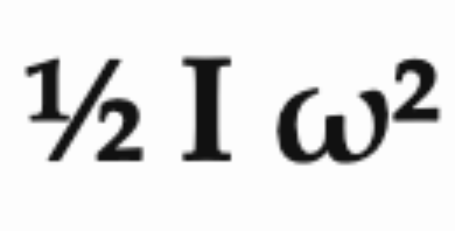 , où I est le moment d'inertie et ω est la vitesse angulaire. Le levier étant supposé dépourvu de masse, l'inertie du système est équivalente à celle d'un cylindre fixe :
, où I est le moment d'inertie et ω est la vitesse angulaire. Le levier étant supposé dépourvu de masse, l'inertie du système est équivalente à celle d'un cylindre fixe :  . Brancher les valeurs donne I = 0,24 kg⋅m^2. Par conséquent, l’énergie cinétique de rotation de ce système peut être calculée à 3 Joules.
. Brancher les valeurs donne I = 0,24 kg⋅m^2. Par conséquent, l’énergie cinétique de rotation de ce système peut être calculée à 3 Joules. 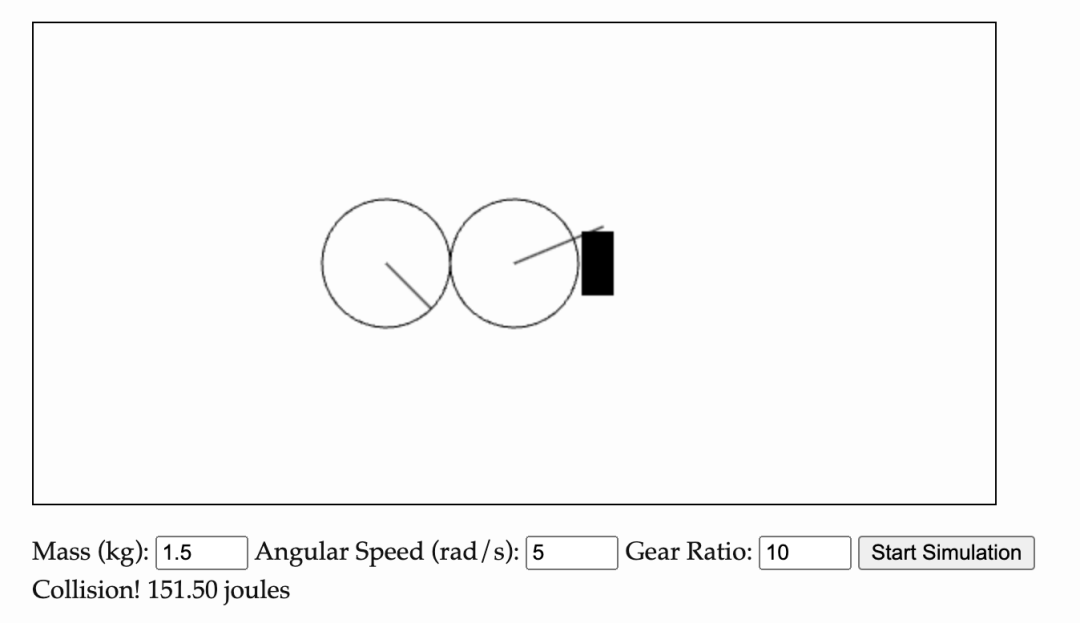

Alasannya ialah kotak gear memberikan leverage mekanikal yang kritikal: banyak motor tidak dapat memberikan tork yang mencukupi apabila bekerja sendiri, jadi jurutera memasang gear pada motor berkelajuan tinggi dikorbankan untuk tork yang diperlukan.
Sistem gear jenis ini adalah "tegar" dan tidak boleh "didorong secara undur". Pusing balik. Jadi pada hujung kotak gear yang lain, lebih banyak daya perlu dikenakan untuk menahan daya putaran yang dihasilkan oleh motor berkelajuan tinggi.
Berdasarkan pertimbangan di atas, 1X Technologies telah komited untuk mengeluarkan tork tinggi, motor berkelajuan rendah selama sepuluh tahun yang lalu untuk memaksimumkan keselamatan sistem transmisi. Terima kasih kepada sistem motor dan pemacu yang digunakan oleh robot NEO dengan nisbah gear yang lebih kecil dan berat yang lebih ringan, ia telah menjadi robot domestik pertama yang boleh disepadukan dengan selamat ke dalam persekitaran rumah.
1 kemajuan robot umum. Perkakasan robot adalah mahal, dan mengupah pengendali jauh manusia untuk melaksanakan tugas menggunakan perkakasan besar adalah sama mahal. Selain itu, kecekapan operasi jauh adalah sangat rendah, jauh lebih rendah daripada kelajuan di mana manusia boleh menyelesaikan tugas secara langsung.
2. Jika kita mengikat kamera yang dipasang di kepala kepada orang ramai dan menyuruh mereka memakai sarung tangan getah besar yang menutupi badan mereka, kita boleh dengan cepat mengumpul kumpulan data besar orang yang melakukan pelbagai kerja. dan tugasan. Orang biasa secara tidak sedar menyelesaikan sejumlah besar tindakan dan tugas operasi yang berbeza dalam kehidupan seharian mereka. Walaupun terdapat kesukaran untuk melihat secara langsung output gerakan mentah, kita boleh membuat kesimpulan tindakan dengan menganalisis perubahan pose dalam video. Pengumpulan data jenis ini boleh membantu memecahkan halangan kepada pembangunan robot tujuan umum sehingga perkakasan yang lebih maju tersedia.
3 Terdapat banyak video orang pertama dan orang ketiga di Internet, yang boleh melatih robot untuk mengenali dan mempelajari pelbagai aktiviti yang dilakukan orang dalam video, dengan itu berkembang lagi. saiz Data kami.
Sebelum menskalakan pengumpulan data jenis ini, penting juga untuk ambil perhatian bahawa tiada bahagian yang berputar cepat di dalam badan kita Berbanding dengan motor yang berputar pada 5000 RPM , tenaga kinetik otot Sangat rendah, jisim berkesan yang kita bawa semasa bergerak juga jauh lebih kecil, jadi anda akan mendapati bahawa walaupun sudut sendi robot mungkin lebih kurang sama dengan manusia, jisim berkesan yang disediakan oleh motor berputarnya mungkin terlalu besar untuk melaksanakan tugas dengan cekap.
Walaupun kita membangunkan strategi kawalan gerakan yang cekap, robot masih tidak dapat mencapai kelajuan dan kelancaran manusia apabila melakukan tindakan seperti menghidupkan dan mematikan lampu dengan mudah atau berjalan dengan anggun. Ini kerana daya yang dikenakan oleh robot apabila menyentuh objek adalah berbeza dengan ketara daripada manusia.
Jadi, jika anda ingin menukar video manusia dengan cepat kepada strategi pergerakan robot, anda memerlukan kaedah berikut:
1. Robot yang sangat patuh dan fleksibel seperti NEO
2 Biarkan robot menjejaki trajektori gerakan video pada kelajuan lebih perlahan daripada 1x, bukannya menyalin terus " ". Dinamik Perkakasan Manusia. Walau bagaimanapun, ini hanya sesuai untuk tugas operasi statik, dan tidak sesuai untuk tugas yang memerlukan sentuhan dengan banyak objek, seperti melipat pakaian dan menyediakan makanan di dapur.
3. Asingkan perancangan gerakan dan perancangan dinamik, membolehkan perancangan gerakan memberi tumpuan untuk mencapai kedudukan sasaran, manakala perancangan dinamik memfokuskan pada mengawal daya apabila perlanggaran berlaku.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Déclaration:
Le contenu de cet article est volontairement contribué par les internautes et les droits d'auteur appartiennent à l'auteur original. Ce site n'assume aucune responsabilité légale correspondante. Si vous trouvez un contenu suspecté de plagiat ou de contrefaçon, veuillez contacter admin@php.cn
Article précédent:Intégrant plus de 200 études connexes, la dernière revue du grand modèle « apprentissage tout au long de la vie » est iciArticle suivant:Intégrant plus de 200 études connexes, la dernière revue du grand modèle « apprentissage tout au long de la vie » est ici
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI