
Maison >développement back-end >tutoriel php >Chemin avec probabilité maximale
Chemin avec probabilité maximale

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBoriginal
- 2024-08-28 06:40:37765parcourir
1514. Chemin avec probabilité maximale
Difficulté :Moyen
Sujets : Tableau, graphique, tas (file d'attente prioritaire), chemin le plus court
Vous recevez un graphe pondéré non orienté de n nœuds (indexés 0), représenté par une liste d'arêtes où edge[i] = [a, b] est une arête non orientée reliant les nœuds a et b avec une probabilité de succès de traverser ce bord succProb[i].
Étant donné le début et la fin de deux nœuds, trouver le chemin avec la probabilité maximale de succès pour aller du début à la fin et renvoyer sa probabilité de succès.
S'il n'y a pas de chemin du début à la fin, renvoie 0. Votre réponse sera acceptée si elle diffère de la bonne réponse d'au plus 1e-5.
Exemple 1 :
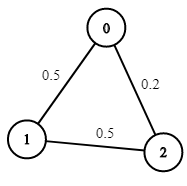
- Entrée : n = 3, bords = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.2], début = 0, fin = 2
- Sortie : 0,25000
- Explication : Il existe deux chemins du début à la fin, l'un ayant une probabilité de succès = 0,2 et l'autre a 0,5 * 0,5 = 0,25.
Exemple 2 :
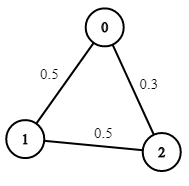
- Entrée : n = 3, bords = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.3], début = 0, fin = 2
- Sortie : 0,30000
Exemple 3 :
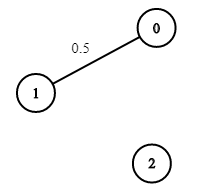
- Entrée : n = 3, bords = [[0,1]], succProb = [0.5], début = 0, fin = 2
- Sortie : 0,00000
- Explication : Il n'y a pas de chemin entre 0 et 2.
Contraintes :
- 2 <= n <= 10^4
- 0 <= début, fin < n
- début != fin
- 0 <= a, b < n
- a != b
- 0 <= succProb.length == bords.length <= 2*10^4
- 0 <= succProb[i] <= 1
- Il y a au plus une arête entre deux nœuds
Indice :
- Multiplier les probabilités entraînera des erreurs de précision.
- Prenez les probabilités du journal pour résumer les nombres au lieu de les multiplier.
- Utilisez l'algorithme de Dijkstra pour trouver le chemin minimum entre les deux nœuds après avoir annulé tous les coûts.
Solution :
Nous pouvons utiliser une version modifiée de l'algorithme de Dijkstra. Au lieu de trouver le chemin le plus court, vous maximiserez les chances de succès.
Implémentons cette solution en PHP : 1514. Chemin avec probabilité maximale
<?php
/**
* @param Integer $n
* @param Integer[][] $edges
* @param Float[] $succProb
* @param Integer $start_node
* @param Integer $end_node
* @return Float
*/
function maxProbability($n, $edges, $succProb, $start_node, $end_node) {
...
...
...
/**
* go to ./solution.php
*/
}
// Example usage:
$n1 = 3;
$edges1 = [[0,1],[1,2],[0,2]];
$succProb1 = [0.5,0.5,0.2];
$start_node1 = 0;
$end_node1 = 2;
echo maxProbability($n1, $edges1, $succProb1, $start_node1, $end_node1);//Output: 0.25000
$n2 = 3;
$edges2 = [[0,1],[1,2],[0,2]];
$succProb2 = [0.5,0.5,0.3];
$start_node2 = 0;
$end_node2 = 2;
echo maxProbability($n2, $edges2, $succProb2, $start_node2, $end_node2);//Output: 0.30000
$n3 = 3;
$edges3 = [[0,1]];
$succProb3 = [0.5;
$start_node3 = 0;
$end_node3 = 2;
echo maxProbability($n3, $edges3, $succProb3, $start_node3, $end_node3); //Output: 0.00000
?>
<h3>
Explication:
</h3>
<ol>
<li><p><strong>Représentation graphique</strong> : Le graphique est représenté comme une liste de contiguïté où chaque nœud pointe vers ses voisins ainsi que les probabilités de succès des arêtes qui les relient.</p></li>
<li><p><strong>Tableau de probabilité maximale</strong> : Un tableau maxProb est utilisé pour stocker la probabilité maximale d'atteindre chaque nœud à partir du nœud de départ.</p></li>
<li><p><strong>File d'attente prioritaire</strong> : Un tas maximum (SplPriorityQueue) est utilisé pour explorer en premier les chemins avec la probabilité la plus élevée. Ceci est crucial pour garantir que lorsque nous atteignons le nœud de destination, nous avons trouvé le chemin avec la probabilité maximale.</p></li>
<li>
<p><strong>Algorithme</strong> :</p>
<ul>
<li>Initialisez la probabilité du nœud de départ à 1 (puisque la probabilité de rester au départ est de 1).</li>
<li>Utilisez la file d'attente prioritaire pour explorer les nœuds, en mettant à jour la probabilité maximale d'atteindre chaque voisin.</li>
<li>Si le nœud de destination est atteint, renvoie la probabilité.</li>
<li>Si aucun chemin n'existe, renvoie 0.</li>
</ul>
</li>
</ol>
<h3>
Sortir:
</h3>
<p>Pour l'exemple fourni :<br>
</p>
<pre class="brush:php;toolbar:false">$n = 3;
$edges = [[0,1],[1,2],[0,2]];
$succProb = [0.5,0.5,0.2];
$start_node = 0;
$end_node = 2;
La sortie sera de 0,25.
Cette approche garantit une solution efficace utilisant l'algorithme de Dijkstra tout en gérant les spécificités des calculs de probabilité.
Liens de contact
Si vous avez trouvé cette série utile, pensez à donner une étoile au référentiel sur GitHub ou à partager la publication sur vos réseaux sociaux préférés ?. Votre soutien signifierait beaucoup pour moi !
Si vous souhaitez du contenu plus utile comme celui-ci, n'hésitez pas à me suivre :
- GitHub
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment utiliser cURL pour implémenter les requêtes Get et Post en PHP
- Comment utiliser cURL pour implémenter les requêtes Get et Post en PHP
- Comment utiliser cURL pour implémenter les requêtes Get et Post en PHP
- Comment utiliser cURL pour implémenter les requêtes Get et Post en PHP
- Tous les symboles d'expression dans les expressions régulières (résumé)