
Maison >Périphériques technologiques >IA >Bâtiment intelligent : détection des défauts des murs extérieurs des bâtiments basée sur YOLOv7
Bâtiment intelligent : détection des défauts des murs extérieurs des bâtiments basée sur YOLOv7

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBoriginal
- 2024-06-11 12:01:31563parcourir
Résumé Outlook 01
Les méthodes actuelles basées sur le deep learning sont confrontées à certains défis en termes de vitesse de reconnaissance et de complexité des modèles. Afin de garantir la précision et la rapidité de détection des défauts des murs extérieurs des bâtiments, nous avons étudié une méthode YOLOv7 améliorée nommée BFD-YOLO. Premièrement, le module ELAN d'origine dans YOLOv7 est remplacé par le module léger MobileOne pour réduire le nombre de paramètres et augmenter la vitesse d'inférence. Deuxièmement, un module d'attention coordonnée est ajouté au modèle pour améliorer les capacités d'extraction de fonctionnalités. Ensuite, SCYLLA-IoU est utilisé pour accélérer la détection et augmenter le rappel du modèle. Enfin, nous avons étendu l'ensemble de données ouvert et construit un ensemble de données sur les dommages aux façades de bâtiments comprenant trois défauts typiques. BFD-YOLO démontre une excellente précision et efficacité sur la base de cet ensemble de données. Par rapport à YOLOv7, la précision et le mAP@0,5 de BFD-YOLO sont améliorés respectivement de 2,2 % et 2,9 %, tout en conservant une efficacité considérable. Les expériences montrent que cette méthode permet d'obtenir une précision de détection élevée tout en garantissant des performances en temps réel.
02 Situation actuelle et motivation du projet
La présence de défauts de façade est un problème pressant pendant la phase opérationnelle de construction et est souvent attribuée à des facteurs mécaniques et environnementaux. Les défauts typiques comprennent l'effritement du béton, l'effritement décoratif, les fissures des composants, la déformation à grande échelle, les dommages aux carreaux, les dommages causés par l'humidité, etc. Ces défauts peuvent affecter l’apparence et réduire la durée de vie du bâtiment. En tant que partie intégrante de la détection des dommages structurels, la détection des défauts des murs extérieurs des bâtiments peut permettre aux gouvernements et à la direction de comprendre avec précision l'état global des murs extérieurs des bâtiments, aidant ainsi à formuler des plans de réparation raisonnables. Ceci est crucial pour réduire les coûts d’entretien du bâtiment et prolonger la durée de vie du bâtiment. En tant que partie intégrante de la détection des dommages structurels, la détection des défauts des murs extérieurs des bâtiments peut permettre aux gouvernements et à la direction de comprendre avec précision l'état global des murs extérieurs des bâtiments, aidant ainsi à formuler des plans de réparation raisonnables. Ceci est crucial pour réduire les coûts d’entretien du bâtiment et prolonger la durée de vie du bâtiment. De nombreux pays et régions élaborent des politiques pour des inspections visuelles périodiques standardisées. La détection des défauts dans les murs extérieurs des bâtiments est devenue une partie importante de l'entretien des bâtiments, ce qui permet de comprendre avec précision l'état global des murs extérieurs des bâtiments, aidant ainsi à formuler des plans de réparation raisonnables. Il s'agit d'un moyen important de réduire les coûts d'entretien du bâtiment et de prolonger la durée de vie du bâtiment. De nombreux pays et régions élaborent des politiques pour des inspections visuelles périodiques standardisées. La détection des défauts dans les murs extérieurs des bâtiments est devenue une partie importante de l'entretien des bâtiments, ce qui permet de comprendre avec précision l'état global des murs extérieurs des bâtiments, aidant ainsi à formuler des plans de réparation raisonnables. Il s'agit d'un moyen important de réduire les coûts d'entretien du bâtiment et de prolonger la durée de vie du bâtiment. La détection des défauts dans les murs extérieurs des bâtiments est devenue une partie importante de l'entretien des bâtiments, ce qui permet de comprendre avec précision l'état global des murs extérieurs des bâtiments, aidant ainsi à formuler des plans de réparation raisonnables. Il s'agit d'un moyen important de réduire les coûts d'entretien du bâtiment et de prolonger la durée de vie du bâtiment.
L’inspection visuelle est un moyen simple et fiable d’évaluer l’état extérieur d’un bâtiment. Les inspections extérieures traditionnelles des bâtiments nécessitent généralement que des professionnels arrivent sur le site d'inspection armés d'outils spécialisés, où ils sont évalués à l'aide d'une inspection visuelle, de martelages et d'autres techniques. Ces méthodes s'appuient sur l'expertise et l'expérience de l'inspecteur, qui sont subjectives, dangereuses et inefficaces. En raison de l’augmentation du nombre et de la taille des bâtiments, les méthodes d’inspection visuelle manuelle ne suffisent plus à répondre aux exigences d’inspections à grande échelle. À mesure que la technologie progresse, de nombreuses nouvelles méthodes (telles que le balayage laser, l'imagerie thermique 3D et le SLAM) sont utilisées pour détecter les dommages aux murs extérieurs via des drones et des plates-formes robotiques. Ces nouvelles méthodes sont plus pratiques et plus sûres que les techniques traditionnelles, mais elles prennent du temps et sont coûteuses. Par conséquent, ces méthodes rencontrent également des difficultés pour répondre aux besoins des inspections à grande échelle. Par conséquent, il est nécessaire de développer une méthode de détection des défauts de surface plus précise et plus efficace pour améliorer l’efficacité de la détection et réduire les coûts de calcul.
03 Nouvelles idées et détails pratiques
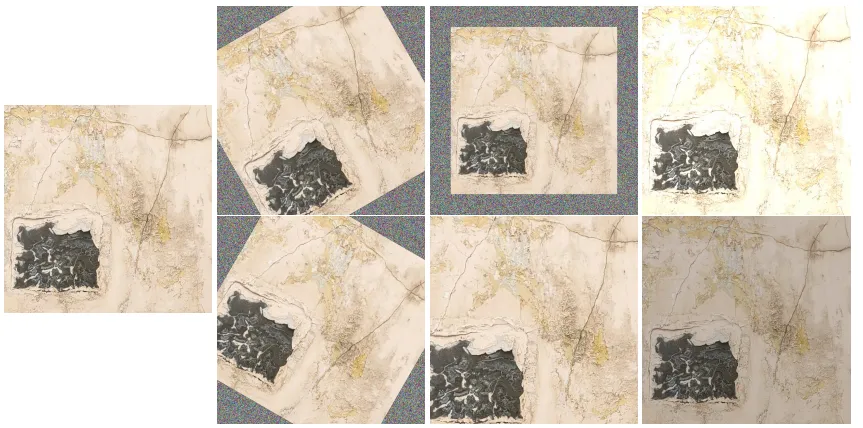
Il existe de nombreux types de défauts des murs extérieurs des bâtiments et différentes méthodes de détection sont applicables. Les types courants incluent les défauts d’arrachement, l’écaillage et les creux des murs. Pour les fissures, il existe davantage d’études utilisant la segmentation sémantique pour la détection. Pour les creux des murs, la méthode de taraudage et la méthode d'imagerie thermique infrarouge sont plus largement utilisées. Après des recherches et des recherches, nous avons sélectionné des types de défauts adaptés aux méthodes de détection de cibles et faciles à construire des ensembles de données. Les images de l’ensemble de données proviennent principalement d’images de façades de bâtiments prises par des téléphones portables, des caméras et des drones. En outre, certaines images provenant d’Internet et d’ensembles de données publics sont également utilisées à des fins d’expansion. Toutes les images ont une largeur de 1 000 pixels à 3 000 pixels. La plage de hauteur est comprise entre 2 000 et 5 000 pixels. L'ensemble de données comprend trois défauts de façade de bâtiment : le délaminage, l'effritement et la perte de carreaux. Au total, 1 907 images originales ont été collectées, contenant des images d’arrière-plan d’images d’imagerie thermique infrarouge. Les images d'arrière-plan sont des images sans défaut ajoutées à l'ensemble de données pour réduire les emplacements d'erreur. L'ensemble de formation, l'ensemble de validation et l'ensemble de test sont divisés selon le rapport 7:2:1. L'image ci-dessous montre un exemple de défauts dans l'ensemble de données.

De gauche à droite se trouvent le délaminage, l’écaillage et la perte des carreaux.
Augmentation des données
Une grande quantité de données est souvent requise dans la formation de modèles de réseaux de neurones. Cependant, il est relativement difficile d’obtenir des images des défauts des façades des bâtiments, et il existe un problème de déséquilibre de classe dans les données collectées. Pour atténuer l'impact de ce problème, nous appliquons des techniques d'augmentation des données aux données de formation. L'augmentation des données est une technique courante pour effectuer diverses transformations sur des données brutes. Il est largement utilisé dans le domaine du deep learning pour générer davantage de données de formation. L'augmentation des données peut aider le modèle à apprendre davantage de variations de données et l'empêcher d'être trop dépendant d'échantillons de formation spécifiques. Les techniques d'amélioration des données de surveillance comprennent des transformations géométriques (par exemple, retournement, rotation, mise à l'échelle, recadrage, etc.) et des transformations de pixels (par exemple, bruit, flou, réglage de la luminosité, réglage de la saturation, etc.). L’objectif de l’augmentation des données est de générer davantage d’échantillons de formation tout en évitant d’être trop dépendant d’un échantillon de formation spécifique. Cela peut aider le modèle à mieux répondre aux modifications des données et à éviter le surajustement. L'augmentation des données peut aider le modèle à apprendre davantage de variations de données et l'empêcher d'être trop dépendant d'échantillons d'entraînement spécifiques. Pour les techniques d'amélioration des données de surveillance, diverses transformations (par exemple retournement, rotation, mise à l'échelle, recadrage, etc.) et transformations de pixels (par exemple bruit, flou, réglage de la luminosité, réglage de la saturation, etc.) peuvent être appliquées. Ces techniques peuvent aider le modèle à mieux répondre aux modifications des données et à éviter le surajustement. Pour tirer pleinement parti des techniques d'augmentation des données, nous pouvons utiliser différentes transformations de données (telles que le retournement, la rotation, la mise à l'échelle, le recadrage, etc.) et les transformations de pixels (telles que le bruit, le flou, le réglage de la luminosité, le réglage de la saturation
Nouveau design Le framework
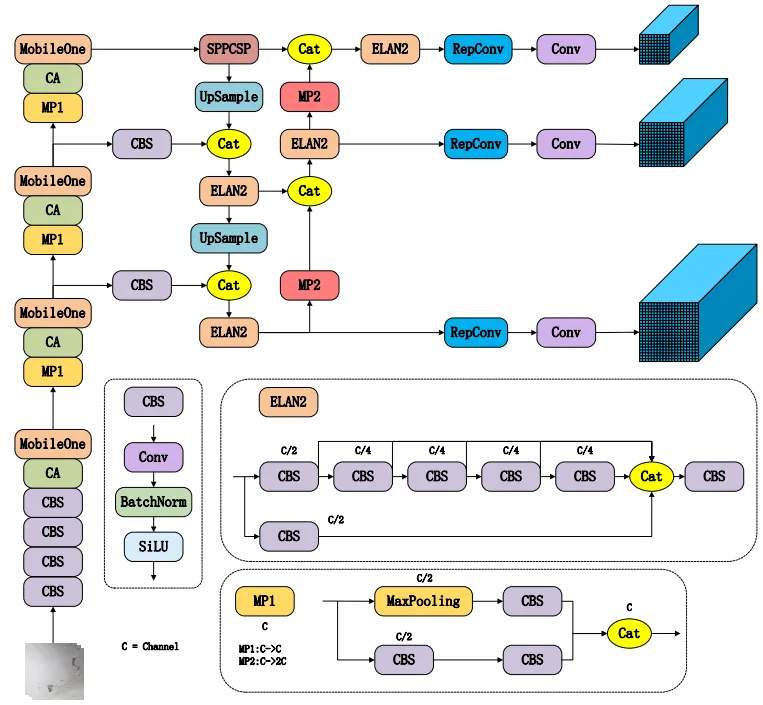
Il peut être divisé en backbone et en tête. La fonction du réseau backbone est d'extraire les fonctionnalités. Le backbone original de YOLOv7 est composé de plusieurs CBS, MP et ELAN. Modules composés de fonctions de normalisation et d'activation SiLU. Le réseau fédérateur amélioré remplace le module ELAN par un module MobileOne pour améliorer la vitesse, et un module d'attention coordonnée est ajouté derrière chaque module MobileOne. image d'entrée et suppression des informations externes, améliorant ainsi efficacement la précision de détection. La tête du réseau est une structure PaFPN, qui se compose d'un SPPPCC, de plusieurs blocs ELAN2, CatConv et de trois blocs RepVGG. La conception d'ELAN adopte une conception de chemin de gradient. Stratégie Par rapport à la stratégie de conception de chemin de données, la stratégie de conception de chemin de gradient se concentre sur l'analyse de la source et de la composition des gradients pour concevoir une architecture de réseau qui utilise efficacement les paramètres de réseau. L'architecture est plus légère. La différence entre ELAN et ELAN2 est structurelle. méthode de reparamétrage appliquée aux blocs RepVGG pour améliorer les performances d'entraînement et la vitesse. Après avoir généré trois cartes de caractéristiques, la tête génère trois résultats de prédiction de tailles différentes via trois modules RepConv
04 Une plate-forme expérimentale est établie pour entraîner le modèle et. mener des expériences. La configuration matérielle et logicielle de la plateforme est présentée dans le tableau ci-dessous.
Win 10
CPU
I7-11700


Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- La différence entre has et with dans le modèle d'association Laravel (introduction détaillée)
- Quels sont les modèles de données couramment utilisés ?
- Quels sont les trois modèles de données de la base de données ?
- Dans le modèle de référence ISO/OSI, quelles sont les principales fonctions de la couche réseau ?
- Quels sont les protocoles appartenant à la couche application dans le modèle de référence TCP IP ?