
Maison >Périphériques technologiques >IA >Yolov10 : explication détaillée, déploiement et application en un seul endroit !
Yolov10 : explication détaillée, déploiement et application en un seul endroit !

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBoriginal
- 2024-06-07 12:05:271242parcourir
1. Avant-propos
Au cours des dernières années, les YOLO sont devenus le paradigme dominant dans le domaine de la détection d'objets en temps réel en raison de son équilibre efficace entre le coût de calcul et les performances de détection. Les chercheurs ont exploré la conception architecturale de YOLO, les objectifs d'optimisation, les stratégies d'expansion des données, etc., et ont réalisé des progrès significatifs. Dans le même temps, le recours à la suppression non maximale (NMS) pour le post-traitement entrave le déploiement de bout en bout de YOLO et affecte négativement la latence d'inférence.
Dans les YOLO, la conception de divers composants manque d'une inspection complète et approfondie, ce qui entraîne une redondance informatique importante et limite les capacités du modèle. Il offre une efficacité sous-optimale et un potentiel d’amélioration des performances relativement important. Dans ce travail, l'objectif est d'améliorer encore les limites d'efficacité des performances de YOLO à la fois en post-traitement et en architecture de modèle. À cette fin, nous proposons d’abord une double allocation cohérente pour la formation des YOLO sans NMS, qui apporte simultanément des performances compétitives et une faible latence d’inférence. En outre, la stratégie globale de conception de modèles axée sur l’efficacité et la précision de YOLO est également présentée.
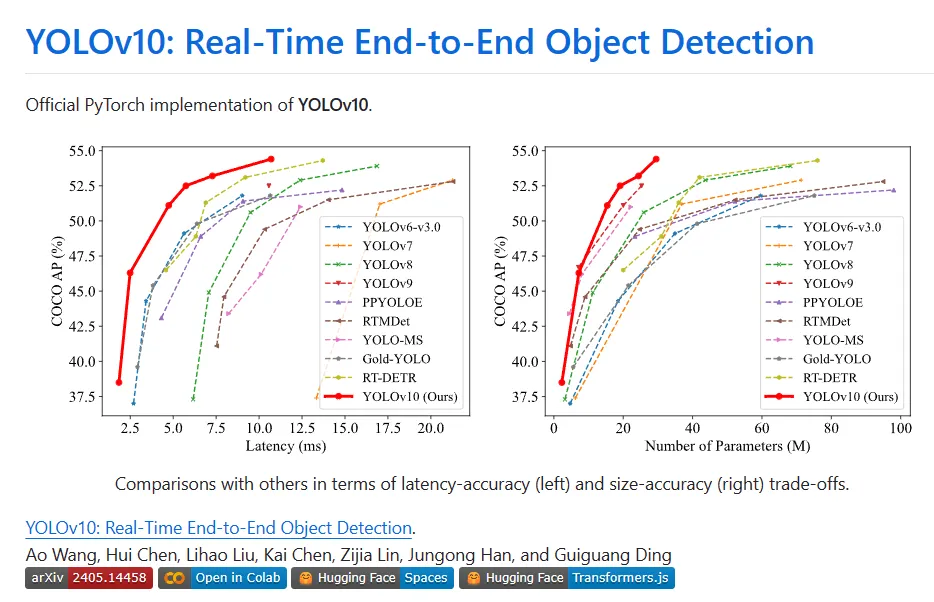
Divers composants de YOLO ont été entièrement optimisés dans les deux perspectives d'amélioration de l'efficacité et de la précision, de réduction considérablement des frais de calcul et d'amélioration des capacités. Le résultat de ces travaux est une nouvelle génération de série YOLO pour la détection de cibles de bout en bout en temps réel, appelée YOLOv10. Des expériences approfondies montrent que YOLOv10 atteint des performances et une efficacité de pointe à différentes échelles de modèle. Par exemple, sous un AP similaire sur COCO, YOLOv10-Sis1.8 est 1,8 fois plus rapide que RT-DETR-R18, et le nombre de paramètres et de FLOP partagés en même temps est 2,8 fois. Par rapport à YOLOv9-C, avec les mêmes performances, YOLOv10-B présente une réduction de 46 % de la latence et une réduction de 25 % des paramètres.
II. Contexte
La détection d'objets en temps réel a toujours été un point chaud de la recherche dans le domaine de la vision par ordinateur. Son objectif est de prédire avec précision la catégorie et l'emplacement des objets dans les images sous une faible latence. . Il est largement utilisé dans diverses applications pratiques, notamment la conduite autonome, la navigation robotisée et le suivi d’objets. Ces dernières années, les chercheurs se sont concentrés sur la conception de détecteurs d’objets basés sur CNN pour permettre une détection en temps réel. Les détecteurs d'objets en temps réel peuvent être divisés en deux catégories : les détecteurs à un étage et les détecteurs à deux étages. Les détecteurs à un étage effectuent des prédictions denses directement sur l'image d'entrée, tandis que les détecteurs à deux étages génèrent d'abord des boîtes candidates, puis effectuent une classification et une régression de localisation sur ces boîtes candidates.
Parmi eux, les YOLO deviennent de plus en plus populaires en raison de leur savant équilibre entre performance et efficacité. Le pipeline de détection de YOLO se compose de deux parties : le traitement ultérieur du modèle et le post-traitement NMS. Cependant, les deux méthodes présentent encore des défauts, ce qui se traduit par des limites de précision et de latence sous-optimales. Plus précisément, YOLO adopte généralement une stratégie d'attribution d'étiquettes un à plusieurs pendant la formation, dans laquelle un objet de mise en œuvre de base correspond à plusieurs exemples de livres. Malgré des performances supérieures, cette approche nécessite que NMS sélectionne la meilleure prédiction positive lors de l'inférence. Cela ralentit l'inférence et rend les performances sensibles aux hyperparamètres de NMS, empêchant YOLO de réaliser un déploiement optimal de bout en bout. Une façon de résoudre ce problème consiste à adopter l’architecture DETR de bout en bout récemment introduite. Par exemple, RT-DETR fournit un encodeur hybride efficace et une sélection de requêtes avec une incertitude minimale, poussant DETR dans les applications en temps réel. Cependant, la complexité inhérente au déploiement du DETR entrave sa capacité à atteindre un équilibre optimal entre précision et vitesse. Une autre ligne explore la détection de bout en bout des détecteurs basés sur CNN, qui utilisent généralement une stratégie d'allocation individuelle pour supprimer les prédictions redondantes.
Cependant, ils introduisent souvent une surcharge d'inférence supplémentaire ou atteignent des performances sous-optimales. De plus, la conception de l’architecture des modèles reste un défi fondamental pour YOLO, qui a un impact significatif sur la précision et la rapidité. Pour obtenir des architectures de modèles plus efficientes et efficaces, les chercheurs ont exploré différentes stratégies de conception. Pour améliorer les capacités d'extraction de fonctionnalités, diverses unités de calcul principales sont fournies pour le backbone, notamment DarkNet, CSPNet, EfficientRep et ELAN. Pour le cou, PAN, BiC, GD, RepGFPN, etc. sont explorés pour améliorer la fusion de fonctionnalités multi-échelles. De plus, les stratégies de mise à l'échelle du modèle et les techniques de reparamétrage sont étudiées. Bien que ces efforts aient réalisé des progrès significatifs, il reste encore de la place pour un examen complet des différents composants de YOLO du point de vue de l'efficacité et de la précision. Par conséquent, la capacité qui en résulte à contraindre le modèle conduit également à des performances différentielles, laissant largement place à l’amélioration de la précision.
3. Nouvelle technologie
Double mission cohérente pour une formation sans NMS
Pendant la formation, les YOLO utilisent généralement TAL pour attribuer plusieurs échantillons positifs par instance. L'adoption de l'allocation un-à-plusieurs génère des signaux de surveillance riches qui aident à optimiser et à atteindre des performances supérieures. Cependant, YOLO doit s'appuyer sur le post-traitement NMS, ce qui entraîne une efficacité d'inférence de déploiement insatisfaisante. Alors que les travaux antérieurs explorent l'appariement biunivoque pour supprimer les prédictions redondantes, ils introduisent souvent une surcharge d'inférence supplémentaire ou produisent des performances sous-optimales. Dans ce travail, YOLO propose une stratégie de formation sans NMS avec une attribution à double étiquette et des mesures de correspondance cohérentes, permettant d'obtenir une efficacité élevée et des performances compétitives.
- Assignations à double étiquette
Contrairement aux affectations un-à-plusieurs, la correspondance un-à-un n'attribue qu'une seule prédiction à chaque vérité terrain, évitant ainsi le post-traitement par NMS . Cependant, cela entraîne une mauvaise supervision, ce qui se traduit par une précision et une vitesse de convergence sous-optimales. Heureusement, cette lacune peut être corrigée par une allocation un-à-plusieurs. Pour y parvenir, YOLO introduit une allocation double label pour combiner le meilleur des deux stratégies. Plus précisément, comme le montre la figure (a) ci-dessous.
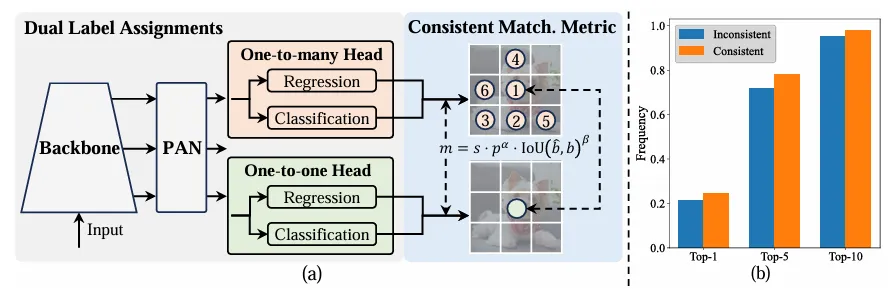
Présentation d'un autre en-tête individuel pour YOLO. Elle conserve la même structure et adopte les mêmes objectifs d'optimisation que la branche un-à-plusieurs d'origine, mais utilise une correspondance un-à-un pour obtenir des attributions d'étiquettes. Pendant le processus d'entraînement, les deux têtes sont optimisées avec le modèle, permettant à la colonne vertébrale et au cou de profiter de la riche supervision fournie par les tâches un à plusieurs. Lors de l'inférence, l'en-tête un-à-plusieurs est ignoré et l'en-tête un-à-un est utilisé pour la prédiction. Cela permet à YOLO d'être déployé de bout en bout sans encourir de coûts d'inférence supplémentaires. De plus, dans l'appariement individuel, le choix précédent est adopté, obtenant les mêmes performances que l'appariement hongrois avec moins de temps de formation supplémentaire.
- Métrique de correspondance cohérente
Pendant le processus d'allocation, les méthodes un-à-un et un-à-plusieurs utilisent une métrique pour évaluer quantitativement le niveau de cohérence entre les prédictions et les instances. Pour obtenir une correspondance basée sur la prédiction de deux branches, une métrique de correspondance unifiée est utilisée :

Dans l'affectation à double étiquette, les branches une-à-plusieurs fournissent des signaux de surveillance plus riches que les branches un-à-un. Intuitivement, si la supervision des en-têtes un-à-un peut être coordonnée avec la supervision des en-têtes un-à-plusieurs, les en-têtes un-à-un peuvent être optimisés dans le sens d'une optimisation des en-têtes un-à-plusieurs. Par conséquent, les têtes un à un peuvent améliorer la qualité des échantillons pendant l’inférence, ce qui se traduit par de meilleures performances. À cette fin, l’écart réglementaire entre les deux est d’abord analysé. En raison du caractère aléatoire du processus de formation, démarrer l'inspection avec deux têtes initialisées avec les mêmes valeurs et produire les mêmes prédictions, c'est-à-dire une tête un-à-un et une tête un-à-plusieurs produisent la même chose pour chaque prédit. paire d'instances p et IoU. Notez les objectifs de régression pour les deux branches.

Quand to2m, i=u*, il atteint la valeur minimale, c'est-à-dire que i est le meilleur échantillon positif en Ω, comme indiqué en (a) ci-dessus. Pour y parvenir, des métriques d'appariement cohérentes sont proposées, à savoir αo2o=r·αo2m et βo2o=r·βo2m, ce qui signifie mo2o=mro2m. Par conséquent, le meilleur échantillon positif pour une tête un-à-plusieurs est également le meilleur échantillon pour une tête un-à-un. Les deux têtes peuvent ainsi être optimisées de manière cohérente et harmonieuse. Par souci de simplicité, r=1 est pris par défaut, c'est-à-dire αo2o=αo2m et βo2o=βo2m. Pour vérifier l'alignement supervisé amélioré, le nombre de paires correspondantes un à un dans le premier 1/5/10 des résultats un à plusieurs est calculé après l'entraînement. Comme le montre (b) ci-dessus, l'alignement est amélioré grâce au procédé de correspondance cohérente.
En raison de l'espace limité, une innovation majeure de YOLOv10 est l'introduction d'une stratégie d'attribution de double étiquette. L'idée principale est d'utiliser des têtes de détection une à plusieurs pour fournir plus d'échantillons positifs pendant la phase de formation afin d'enrichir le modèle. . Formation : lors de la phase d'inférence, la troncature du gradient est utilisée pour passer aux têtes de détection un-à-un. Cela élimine le besoin de post-traitement NMS, réduisant ainsi la surcharge d'inférence tout en maintenant les performances. Le principe n'est effectivement pas difficile, vous pouvez regarder le code pour comprendre :
#https://github.com/THU-MIG/yolov10/blob/main/ultralytics/nn/modules/head.pyclass v10Detect(Detect):max_det = -1def __init__(self, nc=80, ch=()):super().__init__(nc, ch)c3 = max(ch[0], min(self.nc, 100))# channelsself.cv3 = nn.ModuleList(nn.Sequential(nn.Sequential(Conv(x, x, 3, g=x), Conv(x, c3, 1)), \ nn.Sequential(Conv(c3, c3, 3, g=c3), Conv(c3, c3, 1)), \nn.Conv2d(c3, self.nc, 1)) for i, x in enumerate(ch))self.one2one_cv2 = copy.deepcopy(self.cv2)self.one2one_cv3 = copy.deepcopy(self.cv3)def forward(self, x):one2one = self.forward_feat([xi.detach() for xi in x], self.one2one_cv2, self.one2one_cv3)if not self.export:one2many = super().forward(x)if not self.training:one2one = self.inference(one2one)if not self.export:return {'one2many': one2many, 'one2one': one2one}else:assert(self.max_det != -1)boxes, scores, labels = ops.v10postprocess(one2one.permute(0, 2, 1), self.max_det, self.nc)return torch.cat([boxes, scores.unsqueeze(-1), labels.unsqueeze(-1)], dim=-1)else:return {'one2many': one2many, 'one2one': one2one}def bias_init(self):super().bias_init()'''Initialize Detect() biases, WARNING: requires stride availability.'''m = self# self.model[-1]# Detect() module# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum())# nominal class frequencyfor a, b, s in zip(m.one2one_cv2, m.one2one_cv3, m.stride):# froma[-1].bias.data[:] = 1.0# boxb[-1].bias.data[: m.nc] = math.log(5 / m.nc / (640 / s) ** 2)# cls (.01 objects, 80 classes, 640 img)Holistic Efficiency-Accuracy Driven Model Design
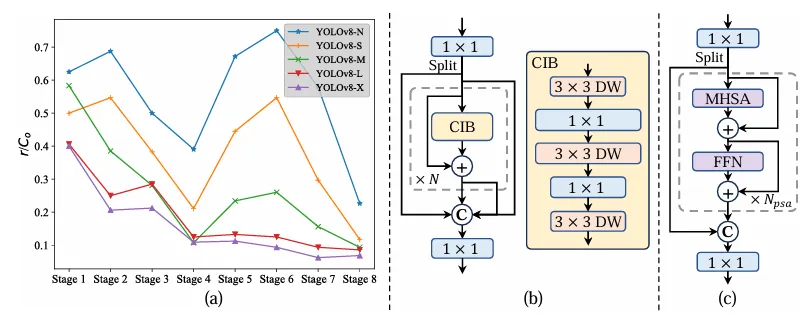
架构改进:
- Backbone & Neck:使用了先进的结构如 CSPNet 作为骨干网络,和 PAN 作为颈部网络,优化了特征提取和多尺度特征融合。
- 大卷积核与分区自注意力:这些技术用于增强模型从大范围上下文中学习的能力,提高检测准确性而不显著增加计算成本。
- 整体效率:引入空间-通道解耦下采样和基于秩引导的模块设计,减少计算冗余,提高整体模型效率。
四、实验
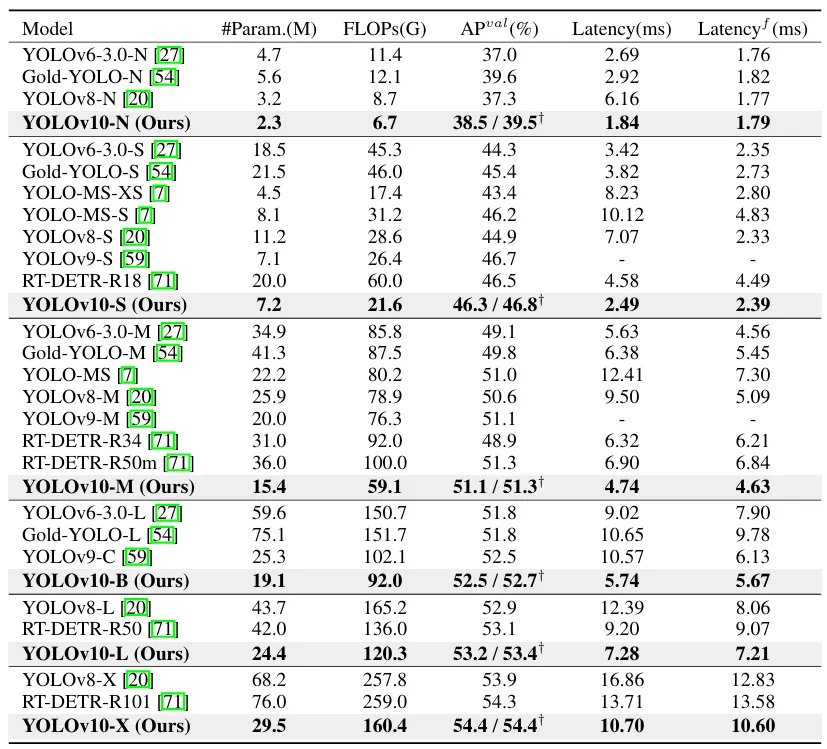
与最先进的比较。潜伏性是通过官方预训练的模型来测量的。潜在的基因测试在具有前处理的模型的前处理中保持了潜在性。†是指YOLOv10的结果,其本身对许多训练NMS来说都是如此。以下是所有结果,无需添加先进的训练技术,如知识提取或PGI或公平比较:

五、部署测试
首先,按照官方主页将环境配置好,注意这里 python 版本至少需要 3.9 及以上,torch 版本可以根据自己本地机器安装合适的版本,默认下载的是 2.0.1:
conda create -n yolov10 pythnotallow=3.9conda activate yolov10pip install -r requirements.txtpip install -e .
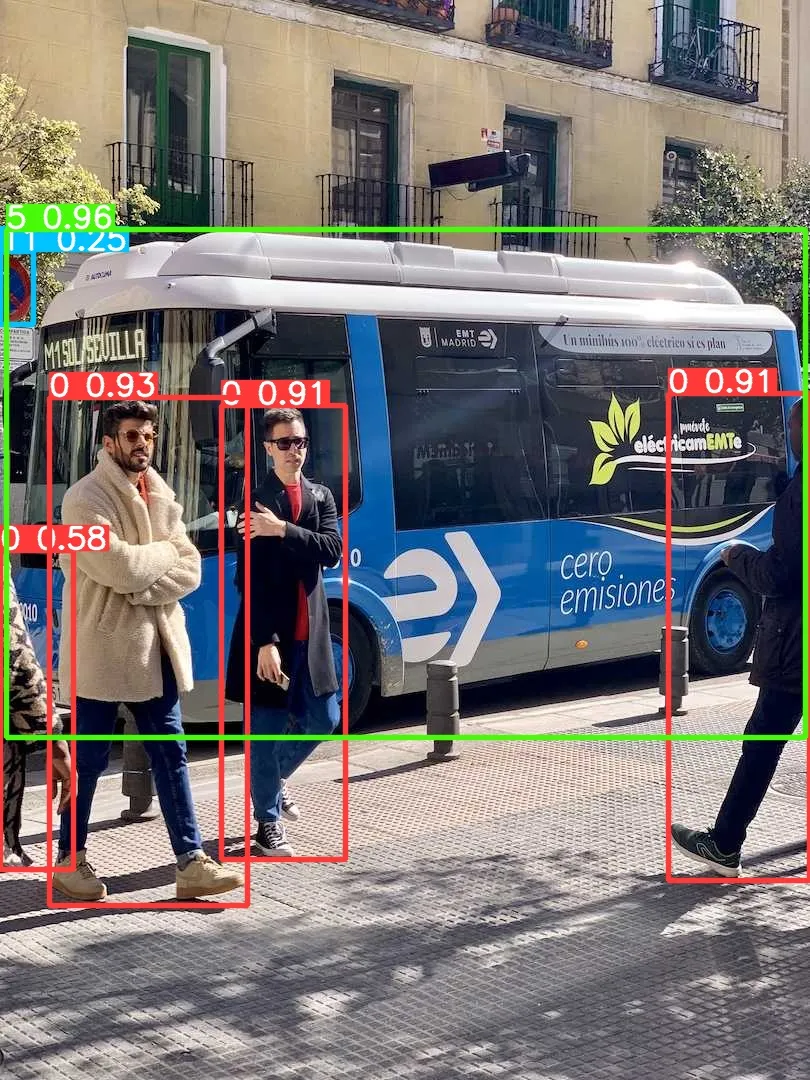
安装完成之后,我们简单执行下推理命令测试下效果:
yolo predict model=yolov10s.pt source=ultralytics/assets/bus.jpg
让我们尝试部署一下,譬如先导出个 onnx 模型出来看看:
yolo export model=yolov10s.pt format=onnx opset=13 simplify
好了,接下来通过执行 pip install netron 安装个可视化工具来看看导出的节点信息:
# run python fisrtimport netronnetron.start('/path/to/yolov10s.onnx')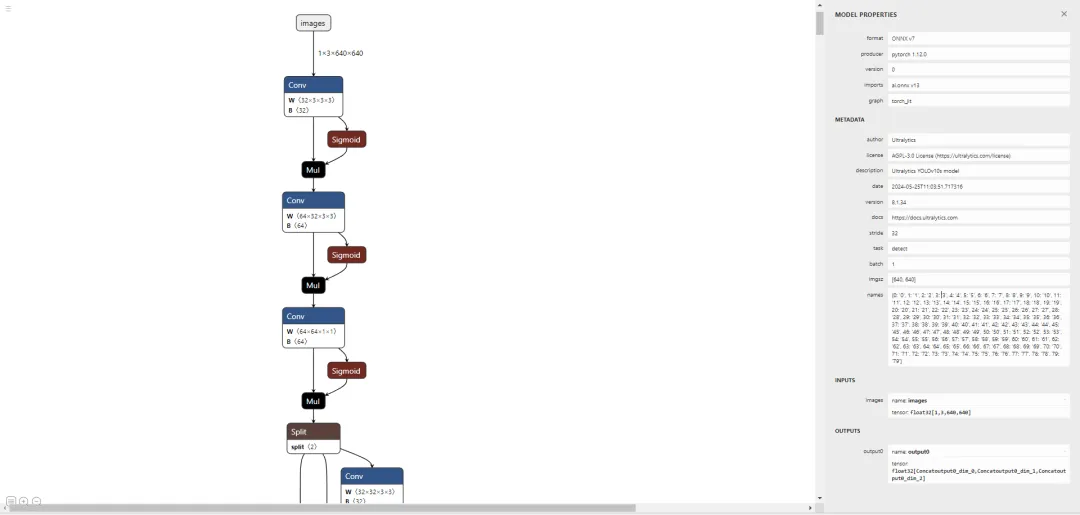
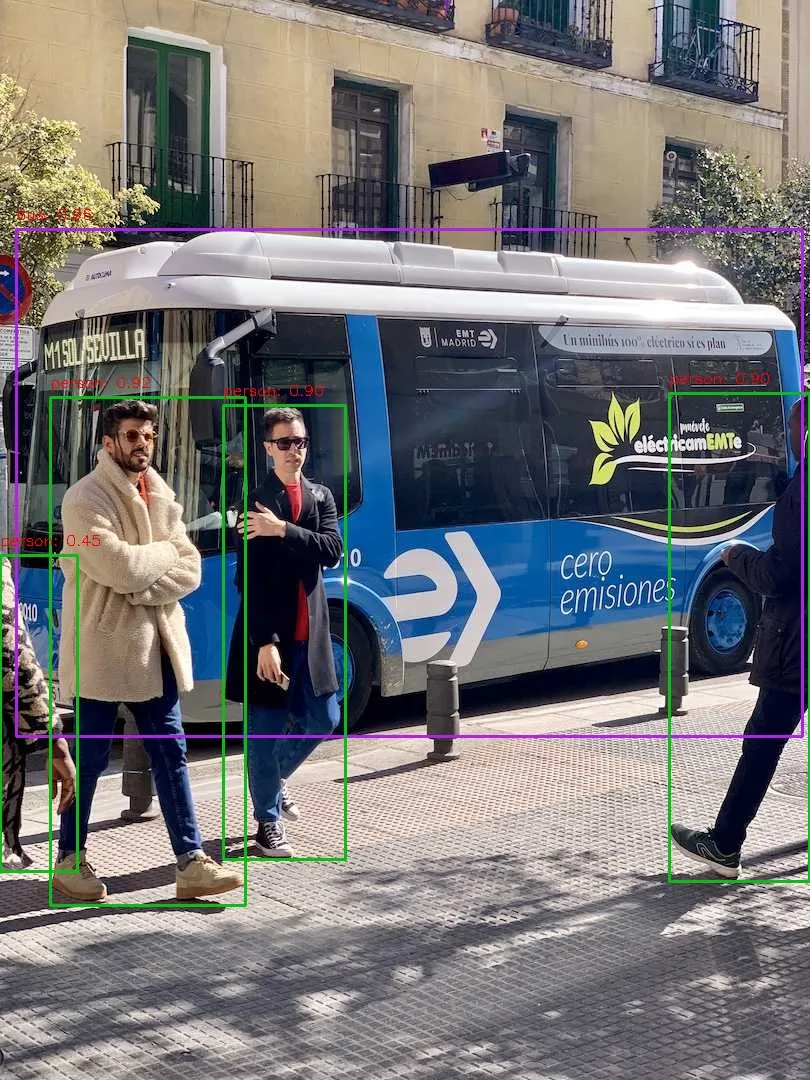
先直接通过 Ultralytics 框架预测一个测试下能否正常推理:
yolo predict model=yolov10s.onnx source=ultralytics/assets/bus.jpg

大家可以对比下上面的运行结果,可以看出 performance 是有些许的下降。问题不大,让我们基于 onnxruntime 写一个简单的推理脚本,代码地址如下,有兴趣的可以自行查看:
# 推理脚本https://github.com/CVHub520/X-AnyLabeling/blob/main/tools/export_yolov10_onnx.py# onnx 模型权重https://github.com/CVHub520/X-AnyLabeling/releases/tag/v2.3.6
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment déployer un projet php sous Linux ?
- Nginx déploie des services de séparation front-end et back-end et des instructions de configuration
- Fonctions du modèle TCP/IP à quatre couches
- Quels sont les modèles logiques couramment utilisés dans les bases de données ?
- Comment déployer le projet nginx sur un réseau externe