

 Technology peripheralsAITsinghua's latest! RoadBEV: How to achieve road surface reconstruction under BEV?
Technology peripheralsAITsinghua's latest! RoadBEV: How to achieve road surface reconstruction under BEV?
Original title: RoadBEV: Road Surface Reconstruction in Bird's Eye View
Paper link: https://arxiv.org/pdf/2404.06605.pdf
Code link: https ://github.com/ztsrxh/RoadBEV
Author affiliation: Tsinghua University, University of California, Berkeley
## Paper idea:
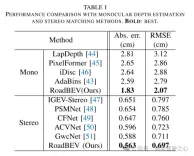
Road surface conditions, especially geometric contours, greatly affect the driving ability of autonomous vehicles. Vision-based online road reconstruction is expected to capture road information in advance. Existing solutions such as monocular depth estimation and stereo vision estimation have their limitations. Recent bird's-eye view (BEV) perception technology provides tremendous motivation for more reliable and accurate reconstruction. This paper uniformly proposes two effective BEV road elevation reconstruction models, named RoadBEV-mono and RoadBEV-stereo respectively, which are different from the use of monocular and binocular images for road elevation estimation. The former estimates road elevation directly from a single image, while the latter estimates road elevation using left and right volumetric views. In-depth analysis reveals their consistency and differences with the perspectives. Experiments on real-world datasets demonstrate the effectiveness and superiority of the model. The elevation errors of RoadBEV-mono and RoadBEV-stereo are 1.83 meters and 0.56 meters respectively. The performance of BEV estimation based on monocular images is improved by 50%. The model in this article is expected to provide a valuable reference in vision-based autonomous driving technology.Main contributions:
This paper demonstrates for the first time the necessity and superiority of road surface reconstruction from a bird's-eye perspective from both theoretical and experimental aspects. This article introduces two models, named RoadBEV-mono and RoadBEV-stereo. For monocular and stereo based schemes, this article explains their mechanisms in detail. This paper comprehensively tests and analyzes the performance of the proposed model, providing valuable insights and prospects for future research.Network Design:
In recent years, the rapid development of unmanned ground vehicles (UGVs) has put forward higher requirements for vehicle-mounted perception systems. Real-time understanding of the driving environment and conditions is crucial for accurate motion planning and control [1]-[3]. For vehicles, roads are the only medium of contact with the physical world. Road surface conditions determine many vehicle characteristics and drivability [4]. As shown in Figure 1(a), road irregularities, such as bumps and potholes, will exacerbate the riding experience of the vehicle, which is intuitively perceptible. Real-time road surface condition perception, especially geometric elevation, greatly helps improve ride comfort [5], [6]. Compared with other perception tasks in unmanned ground vehicles (UGVs) such as segmentation and detection, road surface reconstruction (RSR) is an emerging technology that has received increasing attention recently. Similar to existing perception processes, RSR typically utilizes onboard LiDAR and camera sensors to retain road surface information. LiDAR directly scans road contours and derives point clouds [7], [8]. Road elevation on vehicle trajectories can be extracted directly without complex algorithms. However, the high cost of lidar sensors limits their application in economical mass-produced vehicles. Unlike larger traffic objects such as vehicles and pedestrians, road irregularities are typically small in magnitude, so the accuracy of the point cloud is critical. Motion compensation and filtering are required on real-time road scanning, which further requires high-precision positioning at the centimeter level. Image-based road surface reconstruction (RSR), as a three-dimensional vision task, is more promising than LiDAR in terms of accuracy and resolution. It also retains the road surface texture, making the road perception more comprehensive. Vision-based road elevation reconstruction is actually a depth estimation problem. For monocular cameras, monocular depth estimation can be implemented based on a single image, or multi-view stereo (MVS) can be implemented based on sequences to directly estimate depth [9]. For binocular cameras, binocular matching regresses disparity maps, which can be converted to depth [10], [11]. Given the camera parameters, the road point cloud in the camera coordinate system can be recovered. Through a preliminary post-processing process, road structure and elevation information are finally obtained. Under the guidance of ground-truth (GT) labels, high-precision and reliable RSR can be achieved.However, road surface reconstruction (RSR) from the image perspective has inherent shortcomings. The depth estimation for a specific pixel is actually to find optimal bins along the direction perpendicular to the image plane (shown as the orange point in Figure 1(b)). There is a certain angular deviation between the depth direction and the road surface. Changes and trends in road profile features are inconsistent with changes and trends in the search direction. Information cues about road elevation changes are sparse in the depth view. Furthermore, the depth search range is the same for each pixel, causing the model to capture global geometric hierarchy rather than local surface structure. Due to the global but coarse depth search, fine road elevation information is destroyed. Since this paper focuses on elevation in the vertical direction, the effort in the depth direction is wasted. In perspective views, texture details at long distances are lost, which further poses challenges for efficient depth regression unless further a priori constraints are introduced [12].
Estimating road elevation from a top view (i.e., bird's eye view, BEV) is a natural idea because elevation essentially describes vibrations in the vertical direction. Bird's eye view is an effective paradigm for representing multi-modal and multi-view data in unified coordinates [13], [14]. Recent state-of-the-art performance on 3D object detection and segmentation tasks was achieved by approaches based on bird's-eye views [15], as opposed to perspective views, which are performed by introducing estimated heads on view-transformed image features. Figure 1 illustrates the motivation for this paper. Instead of focusing on the global structure in the image view, the reconstruction in the bird's-eye view directly identifies road features within a specific small range in the vertical direction. Road features projected in a bird's-eye view densely reflect structural and contour changes, facilitating efficient and refined searches. The influence of perspective effects is also suppressed because roads are represented uniformly on a plane perpendicular to the viewing angle. Road reconstruction based on bird's-eye view features is expected to achieve higher performance.
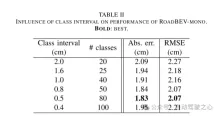
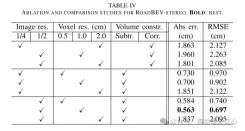
This paper reconstructs the road surface under BEV to solve the problems identified above. In particular, this paper focuses on road geometry, namely elevation. In order to utilize monocular and binocular images and demonstrate the broad feasibility of bird's-eye view perception, this paper proposes two sub-models named RoadBEV-mono and RoadBEV-stereo. Following the paradigm of a bird's eye view, this paper defines voxels of interest covering potential road relief. These voxels query pixel features through 3D-2D projection. For RoadBEV-mono, this paper introduces a height estimation head on the reshaped voxel features. The structure of RoadBEV-stereo is consistent with binocular matching in image views. Based on the left and right voxel features, a 4D cost volume is constructed in the bird's-eye view, which is aggregated through 3D convolution. Elevation regression is considered as a classification of predefined bins to enable more efficient model learning. This paper validates these models on a real-world dataset previously published by the authors, showing that they have huge advantages over traditional monocular depth estimation and stereo matching methods.
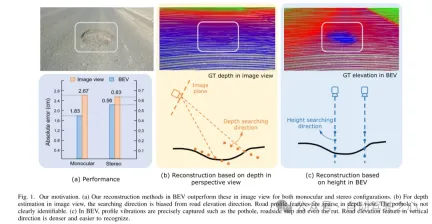
Figure 1. Motivation for this article. (a) Regardless of monocular or binocular configuration, our reconstruction method in bird's-eye view (BEV) outperforms the method in image view. (b) When performing depth estimation in the image view, the search direction is biased from the road elevation direction. In the depth view, road outline features are sparse. Potholes are not easily identified. (c) In a bird's-eye view, contour vibrations such as potholes, curb steps and even ruts can be accurately captured. Road elevation features in the vertical direction are denser and easier to identify.

Figure 2. Coordinate representation and generation of true value (GT) elevation labels. (a) Coordinates (b) Region of interest (ROI) in image view (c) Region of interest (ROI) in bird's eye view (d) Generating ground truth (GT) labels in grid
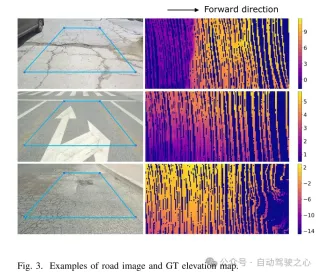
Figure 3. Example of road image and ground truth (GT) elevation map.
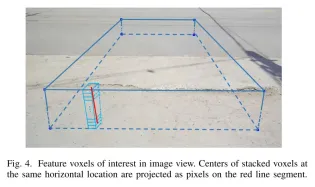
Figure 4. Feature voxels of interest in image view. The centers of stacked voxels located at the same horizontal position are projected to pixels on the red line segment.
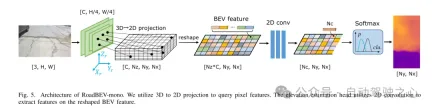
Figure 5. Architecture of RoadBEV-mono. This paper uses 3D to 2D projection to query pixel features. The elevation estimation head uses 2D convolution to extract features on the reshaped Bird's Eye View (BEV) features.
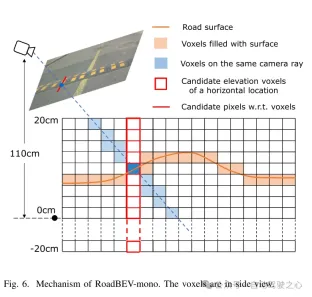
Figure 6. Mechanism of RoadBEV-mono. Voxels are shown in side view.
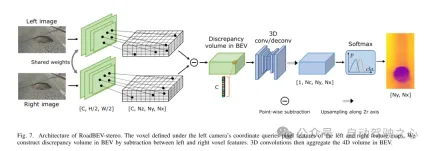
Figure 7. RoadBEV-stereo architecture. The voxels defined in the left camera coordinate system query the pixel features of the left and right feature maps. This paper constructs a difference volume in the Bird's Eye View (BEV) through the subtraction between left and right voxel features. Then, 3D convolution aggregates the 4D volume in the bird's-eye view.
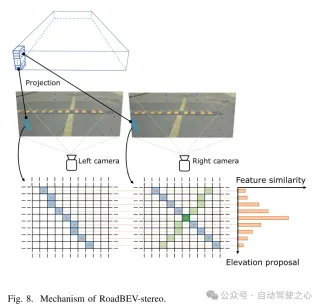
Figure 8. Mechanism of RoadBEV-stereo.
Experimental results:
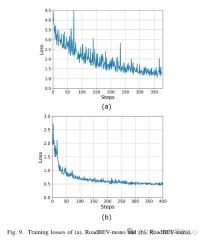
Figure 9. Training loss of (a) RoadBEV-mono and (b) RoadBEV-stereo.
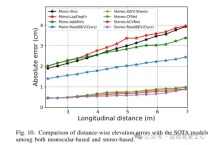
Figure 10. Comparison of elevation errors in the distance direction with the SOTA model based on monocular and binocular.
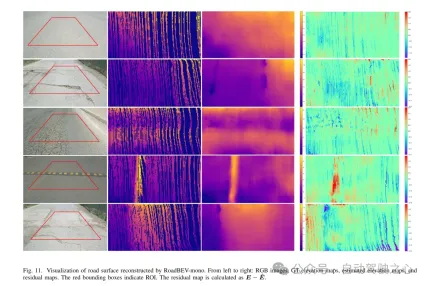
Figure 11. Visualization of road surface reconstructed by RoadBEV-mono.
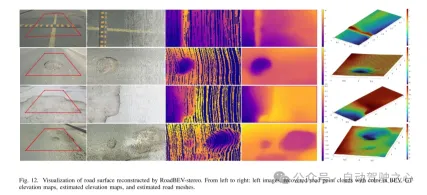
Figure 12. Visualization of road surface reconstructed by RoadBEV-stereo.

Summarize:
This article reconstructs the elevation of the road surface in a bird's-eye view for the first time. This paper proposes and analyzes two models based on monocular and binocular images, named RoadBEV-mono and RoadBEV-stereo respectively. This paper finds that monocular estimation and binocular matching in BEV are the same mechanisms as in perspective views, which are improved by narrowing the search range and mining features directly in the elevation direction. Comprehensive experiments on real-world datasets verify the feasibility and superiority of the proposed BEV volume, estimation head and parameter settings. For monocular cameras, the reconstruction performance in BEV is improved by 50% compared to perspective view. At the same time, in BEV, the performance of using binocular cameras is three times that of monocular cameras. This article provides in-depth analysis and guidance on the model. The groundbreaking exploration of this article also provides valuable reference for further research and applications related to BEV perception, 3D reconstruction and 3D detection.
The above is the detailed content of Tsinghua's latest! RoadBEV: How to achieve road surface reconstruction under BEV?. For more information, please follow other related articles on the PHP Chinese website!

 从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM
从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM1 前言在发布DALL·E的15个月后,OpenAI在今年春天带了续作DALL·E 2,以其更加惊艳的效果和丰富的可玩性迅速占领了各大AI社区的头条。近年来,随着生成对抗网络(GAN)、变分自编码器(VAE)、扩散模型(Diffusion models)的出现,深度学习已向世人展现其强大的图像生成能力;加上GPT-3、BERT等NLP模型的成功,人类正逐步打破文本和图像的信息界限。在DALL·E 2中,只需输入简单的文本(prompt),它就可以生成多张1024*1024的高清图像。这些图像甚至
 找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PM
找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PMWav2vec 2.0 [1],HuBERT [2] 和 WavLM [3] 等语音预训练模型,通过在多达上万小时的无标注语音数据(如 Libri-light )上的自监督学习,显著提升了自动语音识别(Automatic Speech Recognition, ASR),语音合成(Text-to-speech, TTS)和语音转换(Voice Conversation,VC)等语音下游任务的性能。然而这些模型都没有公开的中文版本,不便于应用在中文语音研究场景。 WenetSpeech [4] 是
 普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM
普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM“Making large models smaller”这是很多语言模型研究人员的学术追求,针对大模型昂贵的环境和训练成本,陈丹琦在智源大会青源学术年会上做了题为“Making large models smaller”的特邀报告。报告中重点提及了基于记忆增强的TRIME算法和基于粗细粒度联合剪枝和逐层蒸馏的CofiPruning算法。前者能够在不改变模型结构的基础上兼顾语言模型困惑度和检索速度方面的优势;而后者可以在保证下游任务准确度的同时实现更快的处理速度,具有更小的模型结构。陈丹琦 普
 解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM
解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM由于复杂的注意力机制和模型设计,大多数现有的视觉 Transformer(ViT)在现实的工业部署场景中不能像卷积神经网络(CNN)那样高效地执行。这就带来了一个问题:视觉神经网络能否像 CNN 一样快速推断并像 ViT 一样强大?近期一些工作试图设计 CNN-Transformer 混合架构来解决这个问题,但这些工作的整体性能远不能令人满意。基于此,来自字节跳动的研究者提出了一种能在现实工业场景中有效部署的下一代视觉 Transformer——Next-ViT。从延迟 / 准确性权衡的角度看,
 Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM
Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM3月27号,Stability AI的创始人兼首席执行官Emad Mostaque在一条推文中宣布,Stable Diffusion XL 现已可用于公开测试。以下是一些事项:“XL”不是这个新的AI模型的官方名称。一旦发布稳定性AI公司的官方公告,名称将会更改。与先前版本相比,图像质量有所提高与先前版本相比,图像生成速度大大加快。示例图像让我们看看新旧AI模型在结果上的差异。Prompt: Luxury sports car with aerodynamic curves, shot in a
 什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM
什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM译者 | 李睿审校 | 孙淑娟近年来, Transformer 机器学习模型已经成为深度学习和深度神经网络技术进步的主要亮点之一。它主要用于自然语言处理中的高级应用。谷歌正在使用它来增强其搜索引擎结果。OpenAI 使用 Transformer 创建了著名的 GPT-2和 GPT-3模型。自从2017年首次亮相以来,Transformer 架构不断发展并扩展到多种不同的变体,从语言任务扩展到其他领域。它们已被用于时间序列预测。它们是 DeepMind 的蛋白质结构预测模型 AlphaFold
 五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM
五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM人工智能就是一个「拼财力」的行业,如果没有高性能计算设备,别说开发基础模型,就连微调模型都做不到。但如果只靠拼硬件,单靠当前计算性能的发展速度,迟早有一天无法满足日益膨胀的需求,所以还需要配套的软件来协调统筹计算能力,这时候就需要用到「智能计算」技术。最近,来自之江实验室、中国工程院、国防科技大学、浙江大学等多达十二个国内外研究机构共同发表了一篇论文,首次对智能计算领域进行了全面的调研,涵盖了理论基础、智能与计算的技术融合、重要应用、挑战和未来前景。论文链接:https://spj.scien
 AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM
AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM说起2010年南非世界杯的最大网红,一定非「章鱼保罗」莫属!这只位于德国海洋生物中心的神奇章鱼,不仅成功预测了德国队全部七场比赛的结果,还顺利地选出了最终的总冠军西班牙队。不幸的是,保罗已经永远地离开了我们,但它的「遗产」却在人们预测足球比赛结果的尝试中持续存在。在艾伦图灵研究所(The Alan Turing Institute),随着2022年卡塔尔世界杯的持续进行,三位研究员Nick Barlow、Jack Roberts和Ryan Chan决定用一种AI算法预测今年的冠军归属。预测模型图


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

ZendStudio 13.5.1 Mac
Powerful PHP integrated development environment

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

SublimeText3 English version
Recommended: Win version, supports code prompts!

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

