

 Technology peripheralsAIRV fusion performance is amazing! RCBEVDet: Radar also has spring, the latest SOTA!
Technology peripheralsAIRV fusion performance is amazing! RCBEVDet: Radar also has spring, the latest SOTA!RV fusion performance is amazing! RCBEVDet: Radar also has spring, the latest SOTA!

Written before&The author’s personal understanding
The main issue this discussion paper focuses on is the application of 3D target detection technology in the process of autonomous driving. Although the development of environmental vision camera technology provides high-resolution semantic information for 3D object detection, this method is limited by issues such as the inability to accurately capture depth information and poor performance in bad weather or low-light conditions. In response to this problem, the discussion proposed a new multi-mode 3D target detection method-RCBEVDet that combines surround-view cameras and economical millimeter-wave radar sensors. This method provides richer semantic information and a solution to problems such as poor performance in bad weather or low-light conditions by comprehensively using information from multiple sensors. In response to this problem, the discussion proposed a new multi-mode 3D target detection method-RCBEVDet that combines surround-view cameras and economical millimeter-wave radar sensors. By comprehensively using information from multi-mode sensors, RCBEVDet is able to provide high-resolution semantic information and exhibit good performance in severe weather or low-light conditions. The core of this method to improve automatic
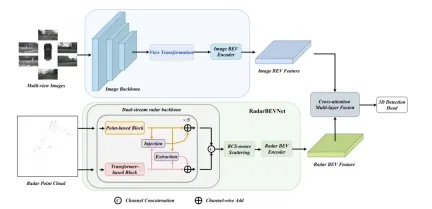
RCBEVDet lies in two key designs: RadarBEVNet and Cross-Attention Multi-layer Fusion Module (CAMF). RadarBEVNet is designed to efficiently extract radar features and it includes a dual-stream radar backbone network RCS (Radar Cross Section) aware BEV (Bird's Eye View) encoder. Such a design uses point cloud-based and transformer-based encoders to process radar points, update radar point features interactively, and use radar-specific RCS characteristics as prior information of target size to optimize the point feature distribution in BEV space. The CAMF module solves the azimuth error problem of radar points through a multi-modal cross-attention mechanism, achieving dynamic alignment of BEV feature maps of radar and cameras and adaptive fusion of multi-modal features through channel and spatial fusion. In the implementation, the point feature distribution in the BEV space is optimized by interactively updating the radar point features and using the radar-specific RCS characteristics as prior information of the target size. The CAMF module solves the azimuth error problem of radar points through a multi-modal cross-attention mechanism, achieving dynamic alignment of BEV feature maps of radar and cameras and adaptive fusion of multi-modal features through channel and spatial fusion.

The new method proposed in the paper solves the existing problems through the following points:
- Efficient radar feature extractor : Through the dual-stream radar backbone and RCS-aware BEV encoder design, it is specifically optimized for the characteristics of radar data and solves the shortcomings of using an encoder designed for lidar to process radar data.
- Powerful radar-camera feature fusion module: Using a deformed cross-attention mechanism, it effectively handles the spatial misalignment problem between the surround image and the radar input, and improves the fusion effect.
The main contributions of the paper are as follows:
- Proposed a novel radar-camera multi-modal 3D target detector RCBEVDet, which achieves high accuracy, high efficiency and Strongly robust 3D object detection.
- An efficient feature extractor for radar data, RadarBEVNet, is designed, which improves the efficiency and accuracy of feature extraction through dual-stream radar backbone and RCS-aware BEV encoder.
- The Cross-Attention Multi-layer Fusion module is introduced to achieve precise alignment and efficient fusion of radar and camera features through the deformation cross-attention mechanism.
- Achieved new state-of-the-art performance in radar-camera multi-modal 3D object detection on nuScenes and VoD datasets, while achieving an optimal balance between accuracy and speed and demonstrating robustness under sensor failure Good robustness under circumstances.
Detailed explanation of RCBEVDet
##RadarBEVNet
RadarBEVNet is proposed in this paper The network architecture used for effective mine vehicle BEV (bird view) feature extraction mainly includes two core components: a dual-stream radar backbone network and an RCS (radar cross-sectional area) sensing BEV encoder. A dual-stream radar backbone network is used to extract rich feature representations from multi-channel radar data. It is built on a deep convolutional neural network (CNN), alternating between nested convolution and pooling layers for feature extraction and dimensionality reduction operations to gradually obtain extractionDual-stream radar backbone
The dual-stream radar backbone network consists of a point-based backbone and a converter-based backbone. The point-based backbone network learns radar features through multi-layer perceptron (MLP) and maximum pooling operations. The process can be simplified to the following formula: here represents radar point features. After adding feature dimensions through MLP , and then extract global information through the maximum pooling operation and connect it with high-dimensional features. The converter is based on the interference block and introduces the distance modulated attention mechanism (DMSA). By considering the distance information between radar points, it optimizes the model's ability to gather adjacent information and promotes the convergence of the model. The self-attention of the DMSA mechanism can be expressed as:RCS-aware BEV encoder
In order to solve the sparsity problem of BEV features produced by traditional radar BEV encoders, an RCS-aware BEV encoder is proposed. It uses RCS as prior information of target size and spreads radar point features to multiple pixels in the BEV space instead of a single pixel to increase the density of BEV features. This process is implemented through the following formula:
where, is the Gaussian BEV weight map based on RCS, which is optimized by maximizing the weight map of all radar points. Finally, the features obtained by RCS spreading are connected and processed by MLP to obtain the final RCS-aware BEV features.
Overall, RadarBEVNet efficiently extracts the features of radar data by combining a dual-stream radar backbone network and an RCS-aware BEV encoder, and optimizes the feature distribution of the BEV space by using RCS as a priori for target size. , which provides a strong foundation for subsequent multi-modal fusion.

Cross-Attention Multi-layer Fusion Module
Cross-Attention Multi-layer Fusion Module (CAMF) is a An advanced network structure for dynamic alignment and fusion of multi-modal features, especially designed for dynamic alignment and fusion of bird's-eye view (BEV) features generated by radar and cameras. This module mainly solves the problem of feature misalignment caused by the azimuth error of radar point clouds. Through the deformable cross-attention mechanism (Deformable Cross-Attention), it effectively captures the small deviations of radar points and reduces the standard cross-attention. computational complexity.
CAMF utilizes a deformed cross-attention mechanism to align the BEV features of cameras and radars. Given a sum of BEV features for a camera and a radar, learnable position embeddings are first added to sum and then converted to query and reference points as keys and values. The calculation of multi-head deformation cross attention can be expressed as:
where represents the index of the attention head, represents the index of the sampling key, and is the total number of sampling keys. Represents the sampling offset and is the attention weight calculated by and .
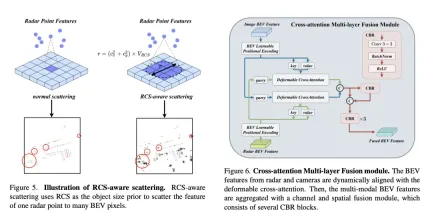
After aligning the BEV features of camera and radar through cross-attention, CAMF uses channel and spatial fusion layers to aggregate multi-modal BEV features. Specifically, two BEV features are first concatenated, and then fed into the CBR (convolution-batch normalization-activation function) block and the fused features are obtained through residual connection. The CBR block sequentially consists of a convolutional layer, a batch normalization layer and a ReLU activation function. After that, three CBR blocks are applied consecutively to further fuse multi-modal features.
Through the above process, CAMF effectively achieves precise alignment and efficient fusion of radar and camera BEV features, providing rich and accurate feature information for 3D target detection, thus improving detection performance.
Related experiments

In the comparison of 3D target detection results on the VoD validation set, RadarBEVNet fuses camera and radar data, It shows excellent performance in terms of average precision (mAP) performance within the entire annotation area and within the area of interest. Specifically, for the entire annotated area, RadarBEVNet achieved AP values of 40.63%, 38.86%, and 70.48% respectively in the detection of cars, pedestrians, and cyclists, increasing the comprehensive mAP to 49.99%. In the area of interest, that is, in the driving channel close to the vehicle, RadarBEVNet's performance is even more outstanding, reaching 72.48%, 49.89% and 87.01% AP values in the detection of cars, pedestrians and cyclists respectively, and the comprehensive mAP reached 69.80%.
These results reveal several key points. First, RadarBEVNet can fully utilize the complementary advantages of the two sensors by effectively fusing camera and radar inputs, improving the overall detection performance. Compared with methods that only use radar, such as PointPillar and RadarPillarNet, RadarBEVNet has a significant improvement in comprehensive mAP, which shows that multi-modal fusion is particularly important to improve detection accuracy. Secondly, RadarBEVNet performs particularly well in areas of interest, which is particularly critical for autonomous driving applications because targets in areas of interest usually have the greatest impact on real-time driving decisions. Finally, although the AP value of RadarBEVNet is slightly lower than some single-modal or other multi-modal methods in the detection of cars and pedestrians, RadarBEVNet shows its overall performance advantages in cyclist detection and comprehensive mAP performance. RadarBEVNet achieves excellent performance on the VoD verification set by fusing multi-modal data from cameras and radars, especially demonstrating strong detection capabilities in areas of interest that are critical to autonomous driving, proving its effectiveness as a The potential of 3D object detection methods.

This ablation experiment demonstrates RadarBEVNet’s continued improvement in 3D object detection performance as it gradually adds major components. Starting from the baseline model BEVDepth, the added components at each step significantly improve NDS (core metric, reflecting detection accuracy and completeness) and mAP (average precision, reflecting the model's ability to detect objects).
- Add time information: By introducing time information, NDS and mAP are improved by 4.4 and 5.4 percentage points respectively. This shows that temporal information is very effective in improving the accuracy and robustness of 3D object detection, probably because the temporal dimension provides additional dynamic information that helps the model better understand the dynamic characteristics of the scene and objects.
- Join PointPillar BEVFusion (based on the fusion of radar and camera): This step further improves NDS and mAP, increasing by 1.7 and 1.8 percentage points respectively. This shows that by fusing radar and camera data, the model can obtain a more comprehensive scene understanding, making up for the limitations of single modal data.
- Introducing RadarBEVNet: NDS and mAP increased again by 2.1 and 3.0 percentage points respectively. As an efficient radar feature extractor, RadarBEVNet optimizes the processing of radar data and improves the quality and effectiveness of features, which is crucial to improving the overall detection performance.
- Add CAMF (Cross Attention Multi-layer Fusion Module): Through fine feature alignment and fusion, NDS is increased by 0.7 percentage points, and mAP is slightly improved to 45.6, showing the improvement in feature fusion aspects of effectiveness. Although the improvement in this step is not as significant as the previous steps, it still proves the importance of accurate feature alignment in improving detection performance during the multi-modal fusion process.
- Add time supervision: Finally, after the introduction of time supervision, NDS increased slightly by 0.4 percentage points to 56.8, while mAP decreased slightly by 0.3 percentage points to 45.3. This shows that temporal supervision can further improve the performance of the model in the temporal dimension, although the contribution to mAP may be slightly limited by the impact of specific experimental settings or data distribution.
Overall, this series of ablation experiments clearly demonstrates the contribution of each major component in RadarBEVNet to improving 3D object detection performance, from the introduction of temporal information to complex multi-modality Fusion strategy, each step brings performance improvement to the model. In particular, the sophisticated processing and fusion strategies for radar and camera data prove the importance of multi-modal data processing in complex autonomous driving environments.
Discussion
The RadarBEVNet method proposed in the paper effectively improves the accuracy and robustness of 3D target detection by fusing multi-modal data from cameras and radars. It performs particularly well in complex autonomous driving scenarios. By introducing RadarBEVNet and Cross-Attention Multi-layer Fusion Module (CAMF), RadarBEVNet not only optimizes the feature extraction process of radar data, but also achieves precise feature alignment and fusion between radar and camera data, thereby overcoming the problem of using a single sensor data limitations, such as radar bearing errors and camera performance degradation in low light or adverse weather conditions.
In terms of advantages, the main contribution of RadarBEVNet is its ability to effectively process and utilize complementary information between multi-modal data, improving detection accuracy and system robustness. The introduction of RadarBEVNet makes the processing of radar data more efficient, and the CAMF module ensures the effective fusion of different sensor data, making up for their respective shortcomings. In addition, RadarBEVNet demonstrated excellent performance on multiple data sets in experiments, especially in areas of interest that are crucial in autonomous driving, showing its potential in practical application scenarios.
In terms of shortcomings, although RadarBEVNet has achieved remarkable results in the field of multi-modal 3D target detection, the complexity of its implementation has also increased accordingly, and may require more computing resources and processing time, which to a certain extent Limits its deployment in real-time application scenarios. In addition, although RadarBEVNet performs well in cyclist detection and overall performance, there is still room for improvement in performance on specific categories (such as cars and pedestrians), which may require further algorithm optimization or more efficient feature fusion strategies to solve.
In short, RadarBEVNet has demonstrated significant performance advantages in the field of 3D target detection through its innovative multi-modal fusion strategy. Although there are some limitations, such as higher computational complexity and room for performance improvement on specific detection categories, its potential in improving the accuracy and robustness of autonomous driving systems cannot be ignored. Future work can focus on optimizing the computational efficiency of the algorithm and further improving its performance on various target detections to promote the widespread deployment of RadarBEVNet in actual autonomous driving applications.
Conclusion
The paper introduces RadarBEVNet and Cross-Attention Multi-layer Fusion Module (CAMF) by fusing camera and radar data, showing significant results in the field of 3D target detection. Improved performance, especially in key scenarios of autonomous driving. It effectively utilizes the complementary information between multi-modal data to improve detection accuracy and system robustness. Despite the challenges of high computational complexity and room for performance improvement in some categories, \ours has shown great potential and value in promoting the development of autonomous driving technology, especially in improving the perception capabilities of autonomous driving systems. Future work can focus on optimizing algorithm efficiency and further improving detection performance to better adapt to the needs of real-time autonomous driving applications.
The above is the detailed content of RV fusion performance is amazing! RCBEVDet: Radar also has spring, the latest SOTA!. For more information, please follow other related articles on the PHP Chinese website!

 Tool Calling in LLMsApr 14, 2025 am 11:28 AM
Tool Calling in LLMsApr 14, 2025 am 11:28 AMLarge language models (LLMs) have surged in popularity, with the tool-calling feature dramatically expanding their capabilities beyond simple text generation. Now, LLMs can handle complex automation tasks such as dynamic UI creation and autonomous a
 How ADHD Games, Health Tools & AI Chatbots Are Transforming Global HealthApr 14, 2025 am 11:27 AM
How ADHD Games, Health Tools & AI Chatbots Are Transforming Global HealthApr 14, 2025 am 11:27 AMCan a video game ease anxiety, build focus, or support a child with ADHD? As healthcare challenges surge globally — especially among youth — innovators are turning to an unlikely tool: video games. Now one of the world’s largest entertainment indus
 UN Input On AI: Winners, Losers, And OpportunitiesApr 14, 2025 am 11:25 AM
UN Input On AI: Winners, Losers, And OpportunitiesApr 14, 2025 am 11:25 AM“History has shown that while technological progress drives economic growth, it does not on its own ensure equitable income distribution or promote inclusive human development,” writes Rebeca Grynspan, Secretary-General of UNCTAD, in the preamble.
 Learning Negotiation Skills Via Generative AIApr 14, 2025 am 11:23 AM
Learning Negotiation Skills Via Generative AIApr 14, 2025 am 11:23 AMEasy-peasy, use generative AI as your negotiation tutor and sparring partner. Let’s talk about it. This analysis of an innovative AI breakthrough is part of my ongoing Forbes column coverage on the latest in AI, including identifying and explaining
 TED Reveals From OpenAI, Google, Meta Heads To Court, Selfie With MyselfApr 14, 2025 am 11:22 AM
TED Reveals From OpenAI, Google, Meta Heads To Court, Selfie With MyselfApr 14, 2025 am 11:22 AMThe TED2025 Conference, held in Vancouver, wrapped its 36th edition yesterday, April 11. It featured 80 speakers from more than 60 countries, including Sam Altman, Eric Schmidt, and Palmer Luckey. TED’s theme, “humanity reimagined,” was tailor made
 Joseph Stiglitz Warns Of The Looming Inequality Amid AI Monopoly PowerApr 14, 2025 am 11:21 AM
Joseph Stiglitz Warns Of The Looming Inequality Amid AI Monopoly PowerApr 14, 2025 am 11:21 AMJoseph Stiglitz is renowned economist and recipient of the Nobel Prize in Economics in 2001. Stiglitz posits that AI can worsen existing inequalities and consolidated power in the hands of a few dominant corporations, ultimately undermining economic
 What is Graph Database?Apr 14, 2025 am 11:19 AM
What is Graph Database?Apr 14, 2025 am 11:19 AMGraph Databases: Revolutionizing Data Management Through Relationships As data expands and its characteristics evolve across various fields, graph databases are emerging as transformative solutions for managing interconnected data. Unlike traditional
 LLM Routing: Strategies, Techniques, and Python ImplementationApr 14, 2025 am 11:14 AM
LLM Routing: Strategies, Techniques, and Python ImplementationApr 14, 2025 am 11:14 AMLarge Language Model (LLM) Routing: Optimizing Performance Through Intelligent Task Distribution The rapidly evolving landscape of LLMs presents a diverse range of models, each with unique strengths and weaknesses. Some excel at creative content gen


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

WebStorm Mac version
Useful JavaScript development tools

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

