
 Technology peripheralsAICVPR 2024 | Zero-sample 6D object pose estimation framework SAM-6D, one step closer to embodied intelligence
Technology peripheralsAICVPR 2024 | Zero-sample 6D object pose estimation framework SAM-6D, one step closer to embodied intelligence
In many practical applications, object pose estimation plays a key role, such as in fields such as embodied intelligence, robot operation, and augmented reality.
In this field, the first task to receive attention is Instance-level 6D pose estimation, which requires annotated data about the target object for model training to make the depth model object-specific properties and cannot be transferred to new objects. Later, the research focus gradually turned to category-level 6D pose estimation, which is used to process unseen objects, but requires that the object belongs to a known category of interest.
And Zero-sample 6D pose estimation is a more generalized task setting. Given a CAD model of any object, it aims to detect the target object in the scene and estimate Its 6D pose. Despite its significance, this zero-shot task setting faces significant challenges in both object detection and pose estimation.

## Figure 1. Zero-sample 6D object pose estimation task
Recently, segment all models SAM [1] has attracted much attention, and its excellent zero-sample segmentation ability is eye-catching. SAM achieves high-precision segmentation through various cues, such as pixels, bounding boxes, text and masks, etc., which also provides reliable support for the zero-sample 6D object pose estimation task, demonstrating its promising potential. Therefore, a new zero-sample 6D object pose estimation framework SAM-6D was proposed by researchers from Cross-Dimensional Intelligence, the Chinese University of Hong Kong (Shenzhen), and South China University of Technology. This research has been recognized by CVPR 2024.
- Paper link: https://arxiv.org/pdf/2311.15707.pdf
- Code Link: https://github.com/JiehongLin/SAM-6D
Instance Segmentation Model (ISM) and Pose Estimation Model (PEM), to achieve the target from RGB-D scene images ; Among them, ISM uses SAM as an excellent starting point, combined with carefully designed object matching scores to achieve instance segmentation of arbitrary objects, and PEM solves the object pose problem through a local-to-local two-stage point set matching process. An overview of the SAM-6D is shown in Figure 2.

##
Overall, the technical contributions of SAM-6D can be summarized as follows:
SAM-6D is an innovative zero-sample 6D pose estimation framework that gives the CAD of any object The model implements instance segmentation and pose estimation of target objects from RGB-D images, and performs excellently on the seven core data sets of BOP [2].
SAM-6D leverages the zero-shot segmentation capability of the segmentation-everything model to generate all possible candidate objects and designs a novel object matching score to identify objects corresponding to the target object. candidate.
SAM-6D regards pose estimation as a local-to-local point set matching problem, adopts a simple but effective Background Token design, and proposes a two-dimensional algorithm for arbitrary objects. Stage point set matching model; the first stage implements coarse point set matching to obtain the initial object pose, and the second stage uses a novel sparse to dense point set transformer to perform fine point set matching to further optimize the pose.
Instance Segmentation Model (ISM)
SAM-6D uses the Instance Segmentation Model (ISM) to detect and segment masks of arbitrary objects .
Given a cluttered scene represented by RGB images, ISM utilizes the zero-shot transfer capability of the Segmentation Everything Model (SAM) to generate all possible candidates. For each candidate object, ISM calculates an object match score to estimate how well it matches the target object in terms of semantics, appearance, and geometry. Finally, by simply setting a matching threshold, instances matching the target object can be identified.
The calculation of the object matching score is obtained by the weighted sum of the three matching items:
Semantic matching items - For the target object, ISM renders multiple views Object template, and use the DINOv2 [3] pre-trained ViT model to extract the semantic features of the candidate object and object template, and calculate the correlation score between them. The semantic matching score is obtained by averaging the top K highest scores, and the object template corresponding to the highest correlation score is regarded as the best matching template.
Appearance matching item - For the best matching template, use the ViT model to extract image block features and calculate the correlation between it and the block features of the candidate object to obtain the appearance matching item Score, used to distinguish semantically similar but visually different objects.
Geometric Match - ISM also designed a geometric match score to account for factors such as differences in shape and size of different objects. The average of the rotation corresponding to the best matching template and the point cloud of the candidate object can give a rough object pose, and the bounding box can be obtained by rigidly transforming and projecting the object CAD model using this pose. Calculating the intersection-over-union (IoU) ratio between the bounding box and the candidate bounding box can obtain the geometric matching score.
Pose Estimation Model (PEM)
For each candidate object that matches the target object, SAM-6D utilizes a Pose Estimation Model (PEM) to predict its relative 6D pose of the object CAD model.
The sampling point sets of segmented candidate objects and object CAD models are represented as  and
and  respectively, where N_m and N_o represent the number of their points; at the same time, the characteristics of these two point sets are represented as
respectively, where N_m and N_o represent the number of their points; at the same time, the characteristics of these two point sets are represented as  and
and  , C represents the number of channels of the feature. The goal of PEM is to obtain an assignment matrix that represents the local-to-local correspondence from P_m to P_o; due to occlusion, P_o only partially matches P_m, and due to segmentation inaccuracy and sensor noise, P_m only partially matches Partial AND matches P_o.
, C represents the number of channels of the feature. The goal of PEM is to obtain an assignment matrix that represents the local-to-local correspondence from P_m to P_o; due to occlusion, P_o only partially matches P_m, and due to segmentation inaccuracy and sensor noise, P_m only partially matches Partial AND matches P_o.
In order to solve the problem of assigning non-overlapping points between two point sets, ISM equips them with Background Tokens, marked  and
and  , which can effectively establish local-to-local relationships based on feature similarity. Correspondence. Specifically, the attention matrix can first be calculated as follows:
, which can effectively establish local-to-local relationships based on feature similarity. Correspondence. Specifically, the attention matrix can first be calculated as follows:

Then the distribution matrix can be obtained

 and
and  represent softmax operations along rows and columns respectively, and
represent softmax operations along rows and columns respectively, and  represents a constant. The value of each row in
represents a constant. The value of each row in  (except the first row) represents the matching probability of each point P_m in the point set P_m with the background and the midpoint of P_o. By locating the index of the maximum score, the point matching P_m can be found ( including background).
(except the first row) represents the matching probability of each point P_m in the point set P_m with the background and the midpoint of P_o. By locating the index of the maximum score, the point matching P_m can be found ( including background).
Once the calculation is  , all matching point pairs {(P_m,P_o)} and their matching scores can be gathered, and finally weighted SVD is used to calculate the object pose.
, all matching point pairs {(P_m,P_o)} and their matching scores can be gathered, and finally weighted SVD is used to calculate the object pose.

## Based on the strategy of Background Token, two point set matching stages are designed in PEM. The model structure is shown in Figure 3, which includes three modules: feature extraction, rough point set matching and fine point set matching.
The rough point set matching module implements sparse correspondence to calculate the initial object pose, and then uses the pose to transform the point set of the candidate object to achieve position coding learning.The fine point set matching module combines the position encoding of the sample point sets of the candidate object and the target object, thereby injecting the rough correspondence in the first stage, and further establishing dense correspondence to obtain a more precise object pose. In order to effectively learn dense interactions at this stage, PEM introduces a novel sparse to dense point set transformer, which implements interactions on sparse versions of dense features, and utilizes Linear Transformer [5] to transform the enhanced sparse features into Diffusion back into dense features.
Experimental results
For the two sub-models of SAM-6D, the instance segmentation model (ISM) is built based on SAM without the need for network retraining and finetune, while the pose estimation model (PEM) is provided by MegaPose [4] Large-scale ShapeNet-Objects and Google-Scanned-Objects synthetic datasets for training.
To verify its zero-sample capability, SAM-6D was tested on seven core data sets of BOP [2], including LM-O, T-LESS, TUD-L, IC-BIN, ITODD, HB and YCB-V. Tables 1 and 2 show the comparison of instance segmentation and pose estimation results of different methods on these seven datasets, respectively. Compared with other methods, SAM-6D performs very well on both methods, fully demonstrating its strong generalization ability.

## to be compared.
Table 2. Comparison of attitude estimation results of different methods on the seven core data sets of BOP
Figure 4 shows Visualization results of detection segmentation and 6D pose estimation of SAM-6D on seven BOP data sets, where (a) and (b) are the test RGB images and depth maps respectively, (c) is the given target object, and (d) and (e) are the visualization results of detection segmentation and 6D pose respectively.
## Figure 4. Visualization results of SAM-6D on the seven core data sets of BOP.
For more implementation details of SAM-6D, welcome to read the original paper.References:
[1] Alexander Kirillov et. al., "Segment anything."
[2] Martin Sundermeyer et. al., "Bop challenge 2022 on detection, segmentation and pose estimation of specific rigid objects."
[3] Maxime Oquab et. al., "Dinov2 : Learning robust visual features without supervision."
[4] Yann Labbe et. al., "Megapose: 6d pose estimation of novel objects via render & compare .”
[5] Angelos Katharopoulos et. al., “Transformers are rnns: Fast autoregressive
transformers with linear attention.”
The above is the detailed content of CVPR 2024 | Zero-sample 6D object pose estimation framework SAM-6D, one step closer to embodied intelligence. For more information, please follow other related articles on the PHP Chinese website!

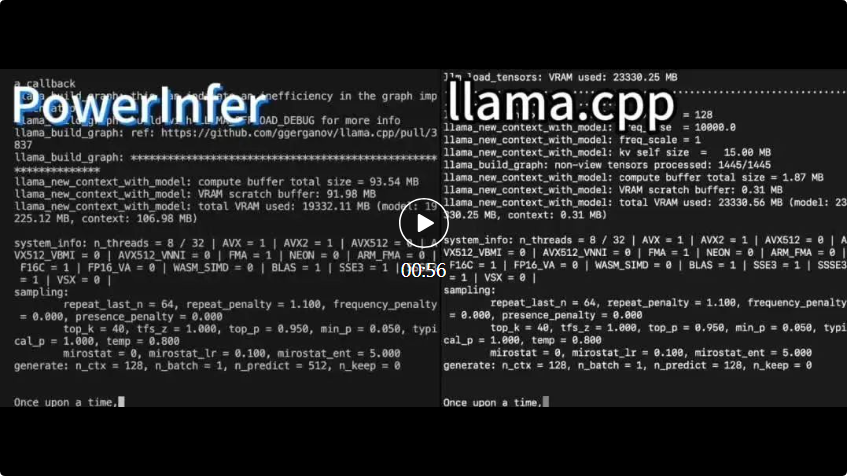 4090生成器:与A100平台相比,token生成速度仅低于18%,上交推理引擎赢得热议Dec 21, 2023 pm 03:25 PM
4090生成器:与A100平台相比,token生成速度仅低于18%,上交推理引擎赢得热议Dec 21, 2023 pm 03:25 PMPowerInfer提高了在消费级硬件上运行AI的效率上海交大团队最新推出了超强CPU/GPULLM高速推理引擎PowerInfer。PowerInfer和llama.cpp都在相同的硬件上运行,并充分利用了RTX4090上的VRAM。这个推理引擎速度有多快?在单个NVIDIARTX4090GPU上运行LLM,PowerInfer的平均token生成速率为13.20tokens/s,峰值为29.08tokens/s,仅比顶级服务器A100GPU低18%,可适用于各种LLM。PowerInfer与
 思维链CoT进化成思维图GoT,比思维树更优秀的提示工程技术诞生了Sep 05, 2023 pm 05:53 PM
思维链CoT进化成思维图GoT,比思维树更优秀的提示工程技术诞生了Sep 05, 2023 pm 05:53 PM要让大型语言模型(LLM)充分发挥其能力,有效的prompt设计方案是必不可少的,为此甚至出现了promptengineering(提示工程)这一新兴领域。在各种prompt设计方案中,思维链(CoT)凭借其强大的推理能力吸引了许多研究者和用户的眼球,基于其改进的CoT-SC以及更进一步的思维树(ToT)也收获了大量关注。近日,苏黎世联邦理工学院、Cledar和华沙理工大学的一个研究团队提出了更进一步的想法:思维图(GoT)。让思维从链到树到图,为LLM构建推理过程的能力不断得到提升,研究者也通
 复旦NLP团队发布80页大模型Agent综述,一文纵览AI智能体的现状与未来Sep 23, 2023 am 09:01 AM
复旦NLP团队发布80页大模型Agent综述,一文纵览AI智能体的现状与未来Sep 23, 2023 am 09:01 AM近期,复旦大学自然语言处理团队(FudanNLP)推出LLM-basedAgents综述论文,全文长达86页,共有600余篇参考文献!作者们从AIAgent的历史出发,全面梳理了基于大型语言模型的智能代理现状,包括:LLM-basedAgent的背景、构成、应用场景、以及备受关注的代理社会。同时,作者们探讨了Agent相关的前瞻开放问题,对于相关领域的未来发展趋势具有重要价值。论文链接:https://arxiv.org/pdf/2309.07864.pdfLLM-basedAgent论文列表:
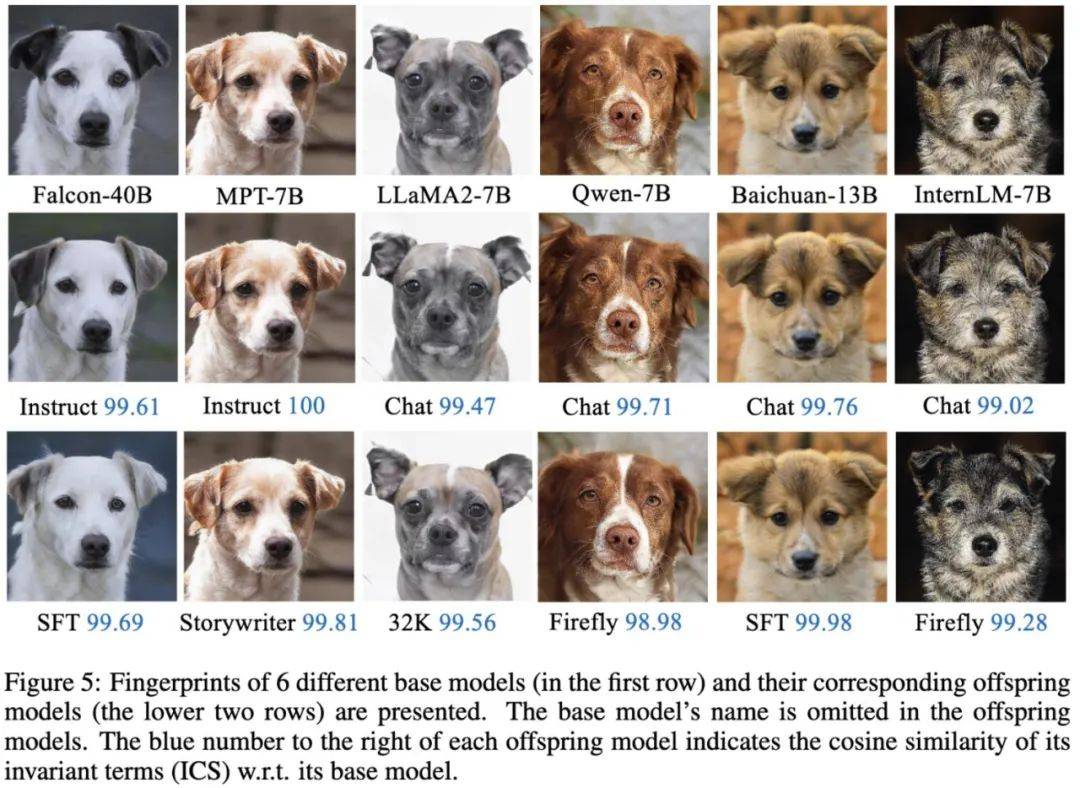 大模型也有小偷?为保护你的参数,上交大给大模型制作「人类可读指纹」Feb 02, 2024 pm 09:33 PM
大模型也有小偷?为保护你的参数,上交大给大模型制作「人类可读指纹」Feb 02, 2024 pm 09:33 PM将不同的基模型象征为不同品种的狗,其中相同的「狗形指纹」表明它们源自同一个基模型。大模型的预训练需要耗费大量的计算资源和数据,因此预训练模型的参数成为各大机构重点保护的核心竞争力和资产。然而,与传统软件知识产权保护不同,对预训练模型参数盗用的判断存在以下两个新问题:1)预训练模型的参数,尤其是千亿级别模型的参数,通常不会开源。预训练模型的输出和参数会受到后续处理步骤(如SFT、RLHF、continuepretraining等)的影响,这使得判断一个模型是否基于另一个现有模型微调得来变得困难。无
 FATE 2.0发布:实现异构联邦学习系统互联Jan 16, 2024 am 11:48 AM
FATE 2.0发布:实现异构联邦学习系统互联Jan 16, 2024 am 11:48 AMFATE2.0全面升级,推动隐私计算联邦学习规模化应用FATE开源平台宣布发布FATE2.0版本,作为全球领先的联邦学习工业级开源框架。此次更新实现了联邦异构系统之间的互联互通,持续增强了隐私计算平台的互联互通能力。这一进展进一步推动了联邦学习与隐私计算规模化应用的发展。FATE2.0以全面互通为设计理念,采用开源方式对应用层、调度、通信、异构计算(算法)四个层面进行改造,实现了系统与系统、系统与算法、算法与算法之间异构互通的能力。FATE2.0的设计兼容了北京金融科技产业联盟的《金融业隐私计算
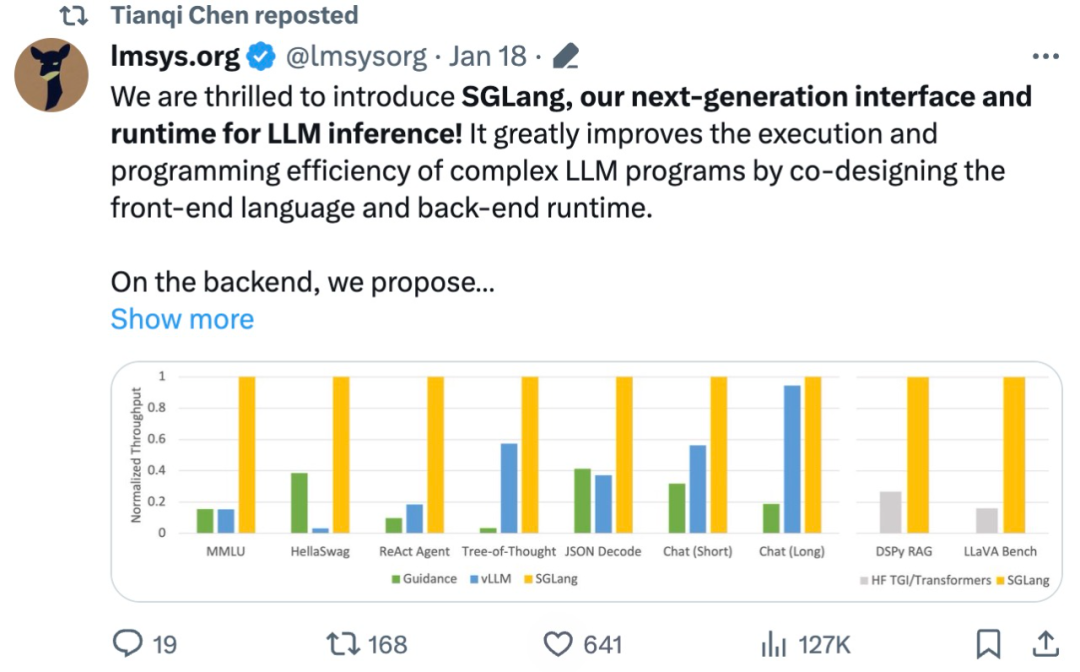 吞吐量提升5倍,联合设计后端系统和前端语言的LLM接口来了Mar 01, 2024 pm 10:55 PM
吞吐量提升5倍,联合设计后端系统和前端语言的LLM接口来了Mar 01, 2024 pm 10:55 PM大型语言模型(LLM)被广泛应用于需要多个链式生成调用、高级提示技术、控制流以及与外部环境交互的复杂任务。尽管如此,目前用于编程和执行这些应用程序的高效系统却存在明显的不足之处。研究人员最近提出了一种新的结构化生成语言(StructuredGenerationLanguage),称为SGLang,旨在改进与LLM的交互性。通过整合后端运行时系统和前端语言的设计,SGLang使得LLM的性能更高、更易控制。这项研究也获得了机器学习领域的知名学者、CMU助理教授陈天奇的转发。总的来说,SGLang的
 220亿晶体管,IBM机器学习专用处理器NorthPole,能效25倍提升Oct 23, 2023 pm 03:13 PM
220亿晶体管,IBM机器学习专用处理器NorthPole,能效25倍提升Oct 23, 2023 pm 03:13 PMIBM再度发力。随着AI系统的飞速发展,其能源需求也在不断增加。训练新系统需要大量的数据集和处理器时间,因此能耗极高。在某些情况下,执行一些训练好的系统,智能手机就能轻松胜任。但是,执行的次数太多,能耗也会增加。幸运的是,有很多方法可以降低后者的能耗。IBM和英特尔已经试验过模仿实际神经元行为设计的处理器。IBM还测试了在相变存储器中执行神经网络计算,以避免重复访问RAM。现在,IBM又推出了另一种方法。该公司的新型NorthPole处理器综合了上述方法的一些理念,并将其与一种非常精简的计算运行
 何恺明和谢赛宁团队成功跟随解构扩散模型探索,最终创造出备受赞誉的去噪自编码器Jan 29, 2024 pm 02:15 PM
何恺明和谢赛宁团队成功跟随解构扩散模型探索,最终创造出备受赞誉的去噪自编码器Jan 29, 2024 pm 02:15 PM去噪扩散模型(DDM)是目前广泛应用于图像生成的一种方法。最近,XinleiChen、ZhuangLiu、谢赛宁和何恺明四人团队对DDM进行了解构研究。通过逐步剥离其组件,他们发现DDM的生成能力逐渐下降,但表征学习能力仍然保持一定水平。这说明DDM中的某些组件对于表征学习的作用可能并不重要。针对当前计算机视觉等领域的生成模型,去噪被认为是一种核心方法。这类方法通常被称为去噪扩散模型(DDM),通过学习一个去噪自动编码器(DAE),能够通过扩散过程有效地消除多个层级的噪声。这些方法实现了出色的图


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Dreamweaver CS6
Visual web development tools

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

WebStorm Mac version
Useful JavaScript development tools

Atom editor mac version download
The most popular open source editor

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

