
 Technology peripheralsAICMUÐ achieves a breakthrough: the robot dog has a full agility value, can cross obstacles at super high speed, and has both speed and safety!
Technology peripheralsAICMUÐ achieves a breakthrough: the robot dog has a full agility value, can cross obstacles at super high speed, and has both speed and safety!CMUÐ achieves a breakthrough: the robot dog has a full agility value, can cross obstacles at super high speed, and has both speed and safety!

CMU and ETH Zurich teams collaborated to develop a new framework called "Agile But Safe" (ABS), which provides a solution for quadruped robots to achieve high-speed movement in complex environments. The framework not only shows high efficiency in avoiding collisions, but also achieves an unprecedented 3.1 millisecond speed. This innovation brings new progress to the field of legged robots.
In the field of high-speed robot motion, maintaining speed and safety at the same time has always been a huge challenge. However, a research team at Carnegie Mellon University (CMU) and ETH Zurich (ETH) recently achieved a breakthrough. The new quadruped robot algorithm they developed can not only move quickly in complex environments, but also skillfully avoid obstacles, truly achieving the goal of "agility and safety". The innovation of this algorithm lies in its ability to quickly identify and analyze the surrounding environment and make intelligent decisions based on real-time data. By using advanced sensors and powerful computing power, the robot is able to accurately sense obstacles around it and avoid them by adjusting its gait and trajectory. The successful application of this technology will greatly promote the development of high-speed robots

Paper address: https://arxiv.org/pdf/2401.17583.pdf
With the support of ABS, the robot dog has demonstrated amazing high-speed obstacle avoidance capabilities in various scenarios:
Narrow corridors with many obstacles:

Messy indoor scenes:

Whether it is grass or outdoors, static or dynamic obstacles, the robot dog can handle them calmly:

When encountering a stroller, the robot dog dodges nimbly:

Warning signs, boxes, and chairs are also not a problem:

It can also easily bypass the sudden appearance of mats and human feet:

The robot dog can even play eagle and catch chickens:

ABS Breakthrough Technology:
RL Learning model-free Reach-Avoid value
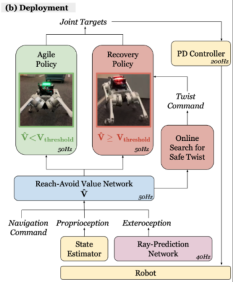
ABS adopts a dual policy (Dual Policy) setting, including an "Agile Policy" (Agile Policy) and a "Recovery Policy" (Recovery Policy). Agility strategies allow the robot to move quickly through obstacles, while recovery strategies step in to ensure the safety of the robot once Reach-Avoid Value Estimation detects potential dangers (such as a sudden appearance of a stroller).



The above is the detailed content of CMUÐ achieves a breakthrough: the robot dog has a full agility value, can cross obstacles at super high speed, and has both speed and safety!. For more information, please follow other related articles on the PHP Chinese website!

 What is Graph of Thought in Prompt EngineeringApr 13, 2025 am 11:53 AM
What is Graph of Thought in Prompt EngineeringApr 13, 2025 am 11:53 AMIntroduction In prompt engineering, “Graph of Thought” refers to a novel approach that uses graph theory to structure and guide AI’s reasoning process. Unlike traditional methods, which often involve linear s
 Optimize Your Organisation's Email Marketing with GenAI AgentsApr 13, 2025 am 11:44 AM
Optimize Your Organisation's Email Marketing with GenAI AgentsApr 13, 2025 am 11:44 AMIntroduction Congratulations! You run a successful business. Through your web pages, social media campaigns, webinars, conferences, free resources, and other sources, you collect 5000 email IDs daily. The next obvious step is
 Real-Time App Performance Monitoring with Apache PinotApr 13, 2025 am 11:40 AM
Real-Time App Performance Monitoring with Apache PinotApr 13, 2025 am 11:40 AMIntroduction In today’s fast-paced software development environment, ensuring optimal application performance is crucial. Monitoring real-time metrics such as response times, error rates, and resource utilization can help main
 ChatGPT Hits 1 Billion Users? 'Doubled In Just Weeks' Says OpenAI CEOApr 13, 2025 am 11:23 AM
ChatGPT Hits 1 Billion Users? 'Doubled In Just Weeks' Says OpenAI CEOApr 13, 2025 am 11:23 AM“How many users do you have?” he prodded. “I think the last time we said was 500 million weekly actives, and it is growing very rapidly,” replied Altman. “You told me that it like doubled in just a few weeks,” Anderson continued. “I said that priv
 Pixtral-12B: Mistral AI's First Multimodal Model - Analytics VidhyaApr 13, 2025 am 11:20 AM
Pixtral-12B: Mistral AI's First Multimodal Model - Analytics VidhyaApr 13, 2025 am 11:20 AMIntroduction Mistral has released its very first multimodal model, namely the Pixtral-12B-2409. This model is built upon Mistral’s 12 Billion parameter, Nemo 12B. What sets this model apart? It can now take both images and tex
 Agentic Frameworks for Generative AI Applications - Analytics VidhyaApr 13, 2025 am 11:13 AM
Agentic Frameworks for Generative AI Applications - Analytics VidhyaApr 13, 2025 am 11:13 AMImagine having an AI-powered assistant that not only responds to your queries but also autonomously gathers information, executes tasks, and even handles multiple types of data—text, images, and code. Sounds futuristic? In this a
 Applications of Generative AI in the Financial SectorApr 13, 2025 am 11:12 AM
Applications of Generative AI in the Financial SectorApr 13, 2025 am 11:12 AMIntroduction The finance industry is the cornerstone of any country’s development, as it drives economic growth by facilitating efficient transactions and credit availability. The ease with which transactions occur and credit
 Guide to Online Learning and Passive-Aggressive AlgorithmsApr 13, 2025 am 11:09 AM
Guide to Online Learning and Passive-Aggressive AlgorithmsApr 13, 2025 am 11:09 AMIntroduction Data is being generated at an unprecedented rate from sources such as social media, financial transactions, and e-commerce platforms. Handling this continuous stream of information is a challenge, but it offers an


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

SublimeText3 Chinese version
Chinese version, very easy to use

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

Dreamweaver Mac version
Visual web development tools

SecLists
SecLists is the ultimate security tester's companion. It is a collection of various types of lists that are frequently used during security assessments, all in one place. SecLists helps make security testing more efficient and productive by conveniently providing all the lists a security tester might need. List types include usernames, passwords, URLs, fuzzing payloads, sensitive data patterns, web shells, and more. The tester can simply pull this repository onto a new test machine and he will have access to every type of list he needs.

