
 Technology peripheralsAIHorizon releases open-source Sparse4D algorithm, pushing one step closer to end-to-end autonomous driving
Technology peripheralsAIHorizon releases open-source Sparse4D algorithm, pushing one step closer to end-to-end autonomous drivingHorizon releases open-source Sparse4D algorithm, pushing one step closer to end-to-end autonomous driving

On January 22, Horizon will open source the Sparse4D series of pure visual autonomous driving algorithms to encourage more developers in the industry to participate in the exploration of cutting-edge technology directions such as end-to-end autonomous driving and sparse perception. Currently, the Sparse4D algorithm has been launched on the GitHub platform. Developers can follow the Horizon GitHub official account "Horizon Robotics" to obtain the source code.
Sparse4D is a series of algorithms towards long-term sparse 3D target detection, which belongs to the category of temporal multi-view fusion sensing technology. Facing the industry development trend of sparse perception, Sparse4D has built a pure sparse fusion perception framework to make the perception algorithm more efficient and precise, and to make the perception system simpler. Compared with the dense BEV algorithm, Sparse4D reduces the computational complexity, breaks the limitation of computing power on the perception range, and surpasses the dense BEV algorithm in terms of perception effect and reasoning speed. In both the nuScenes pure visual 3D detection and 3D tracking lists, Sparse4D ranked first, becoming SOTA, ahead of the latest methods including SOLOFusion, BEVFormer v2 and StreamPETR.

Sparse4D algorithm architecture
##After three versions of iterations, the Horizon Sparse4D team It has successfully overcome technical problems such as improving the performance of sparse algorithms, reducing the computational complexity of timing fusion, and achieving end-to-end target tracking. Recently, they published a paper titled "Sparse4D v3: Advancing End-to-End 3D Detection and Tracking", detailing their research results. By using Horizon business data for performance verification, the Sparse4D team has successfully deployed on the Horizon Journey 5 computing solution. In the future, according to plans, Sparse4D technology will be used in Horizon’s next generation products. The achievement of this result will further promote the development of Horizon.
Dr. Yu Yinan, Vice President of Horizon and President of the Software Platform Product Line, pointed out that the current industry has entered the era of end-to-end sensing, which can be completed with only one network the entire perception task. He believes that the Sparse4D series of algorithms have improved the performance of sparse algorithms to a new level and successfully achieved end-to-end multi-target tracking. This is of great significance for both sparse perception and end-to-end autonomous driving, and can be said to be a milestone breakthrough. Horizon chose to open source Sparse4D to the entire industry, hoping to make progress together with outstanding developers in the industry.

Comparison between traditional perception system and end-to-end perception system
Another example of Horizon actively participating in the ecological construction of open source software for intelligent driving is the open source Sparse4D series of algorithms. This algorithm has huge application potential in the implementation of pure visual, end-to-end autonomous driving. In addition, Horizon has also open sourced leading technologies such as VAD algorithm and MapTR algorithm, which will further promote the development of the industry. It is expected that the Sparse4D algorithm will receive widespread attention and use by industry developers. Horizon's continued efforts will accelerate the industry's development process.
Horizon adheres to the concept of transforming independently innovative technologies, breakthrough products and solutions into the commercial value of ecological partners in the smart car industry, and contributes to the development of the industry. Energize. Through close collaboration, open integration, and cooperative innovation with all parties in the industry, Horizon is committed to becoming the source of living water for the smart automobile industry ecology and providing it with sustainable development momentum. Horizon fully understands that the mass production of autonomous driving is an important breakthrough, so we will continue to embrace open source and accelerate the implementation and mass production of cutting-edge technologies. We firmly believe that the future of win-win cooperation with the industry will be broader, and Horizon will continue to work hard to contribute to the prosperity of the smart car industry.
The above is the detailed content of Horizon releases open-source Sparse4D algorithm, pushing one step closer to end-to-end autonomous driving. For more information, please follow other related articles on the PHP Chinese website!

 AI Game Development Enters Its Agentic Era With Upheaval's Dreamer PortalMay 02, 2025 am 11:17 AM
AI Game Development Enters Its Agentic Era With Upheaval's Dreamer PortalMay 02, 2025 am 11:17 AMUpheaval Games: Revolutionizing Game Development with AI Agents Upheaval, a game development studio comprised of veterans from industry giants like Blizzard and Obsidian, is poised to revolutionize game creation with its innovative AI-powered platfor
 Uber Wants To Be Your Robotaxi Shop, Will Providers Let Them?May 02, 2025 am 11:16 AM
Uber Wants To Be Your Robotaxi Shop, Will Providers Let Them?May 02, 2025 am 11:16 AMUber's RoboTaxi Strategy: A Ride-Hail Ecosystem for Autonomous Vehicles At the recent Curbivore conference, Uber's Richard Willder unveiled their strategy to become the ride-hail platform for robotaxi providers. Leveraging their dominant position in
 AI Agents Playing Video Games Will Transform Future RobotsMay 02, 2025 am 11:15 AM
AI Agents Playing Video Games Will Transform Future RobotsMay 02, 2025 am 11:15 AMVideo games are proving to be invaluable testing grounds for cutting-edge AI research, particularly in the development of autonomous agents and real-world robots, even potentially contributing to the quest for Artificial General Intelligence (AGI). A
 The Startup Industrial Complex, VC 3.0, And James Currier's ManifestoMay 02, 2025 am 11:14 AM
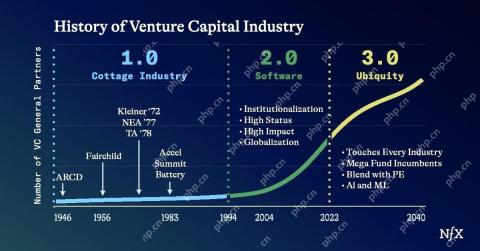
The Startup Industrial Complex, VC 3.0, And James Currier's ManifestoMay 02, 2025 am 11:14 AMThe impact of the evolving venture capital landscape is evident in the media, financial reports, and everyday conversations. However, the specific consequences for investors, startups, and funds are often overlooked. Venture Capital 3.0: A Paradigm
 Adobe Updates Creative Cloud And Firefly At Adobe MAX London 2025May 02, 2025 am 11:13 AM
Adobe Updates Creative Cloud And Firefly At Adobe MAX London 2025May 02, 2025 am 11:13 AMAdobe MAX London 2025 delivered significant updates to Creative Cloud and Firefly, reflecting a strategic shift towards accessibility and generative AI. This analysis incorporates insights from pre-event briefings with Adobe leadership. (Note: Adob
 Everything Meta Announced At LlamaConMay 02, 2025 am 11:12 AM
Everything Meta Announced At LlamaConMay 02, 2025 am 11:12 AMMeta's LlamaCon announcements showcase a comprehensive AI strategy designed to compete directly with closed AI systems like OpenAI's, while simultaneously creating new revenue streams for its open-source models. This multifaceted approach targets bo
 The Brewing Controversy Over The Proposition That AI Is Nothing More Than Just Normal TechnologyMay 02, 2025 am 11:10 AM
The Brewing Controversy Over The Proposition That AI Is Nothing More Than Just Normal TechnologyMay 02, 2025 am 11:10 AMThere are serious differences in the field of artificial intelligence on this conclusion. Some insist that it is time to expose the "emperor's new clothes", while others strongly oppose the idea that artificial intelligence is just ordinary technology. Let's discuss it. An analysis of this innovative AI breakthrough is part of my ongoing Forbes column that covers the latest advancements in the field of AI, including identifying and explaining a variety of influential AI complexities (click here to view the link). Artificial intelligence as a common technology First, some basic knowledge is needed to lay the foundation for this important discussion. There is currently a large amount of research dedicated to further developing artificial intelligence. The overall goal is to achieve artificial general intelligence (AGI) and even possible artificial super intelligence (AS)
 Model Citizens, Why AI Value Is The Next Business YardstickMay 02, 2025 am 11:09 AM
Model Citizens, Why AI Value Is The Next Business YardstickMay 02, 2025 am 11:09 AMThe effectiveness of a company's AI model is now a key performance indicator. Since the AI boom, generative AI has been used for everything from composing birthday invitations to writing software code. This has led to a proliferation of language mod


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

SublimeText3 Linux new version
SublimeText3 Linux latest version

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

SublimeText3 Chinese version
Chinese version, very easy to use

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

