
Home >Technology peripherals >AI >Turtle-inspired robots developed at the University of California may be used for future space exploration
Turtle-inspired robots developed at the University of California may be used for future space exploration

- PHPzforward
- 2023-09-18 20:57:06731browse
What does a robot that can shuttle freely underground look like?

Sorry for misplacing it, but it is actually like this.

The appearance is neither smooth nor soft, but it is said to be the first machine that can "swim" under more than ten centimeters of sand.
The two arms moved very fast.
Of course, "Sandy" is not just for showing off skills. This robot can be controlled through WiFi and can be used in areas such as environmental monitoring, granary inspection and disaster response.

This is the result of a number of experiments conducted by a team of robotics experts from the University of California, San Diego, and it also opens up a new idea for the research of underground robots.
▍How to "swim" under the sand?
So, how does this robot, which is neither soft nor smooth, swim underground?
You must know that swimming in sand has much greater resistance than swimming on the ground or in water, and it is very easy to be damaged in the process. This is one of the main reasons why robots have never conquered the environment below.
To this end, researchers began to look for inspiration in creatures in nature.

The first thing that comes to mind are baby turtles. When baby turtles hatch from eggs buried in the ground, they crawl through the sand using their powerful feet as paddles.
With the source of inspiration, the robot’s two arms also imitate the oversized flippers of a small turtle.
As the robot moves under the sand, it pulls its arms forward, close to the body, and then back out to the sides, like a swimmer
However, researchers soon discovered that when the robot continued to flip its arms and move forward, the robot would naturally move upward due to the resistance of the sand, limiting its use.
Therefore, they flexibly changed the head design of the "Turtle" and designed it into a wedge-shaped head to reduce drag
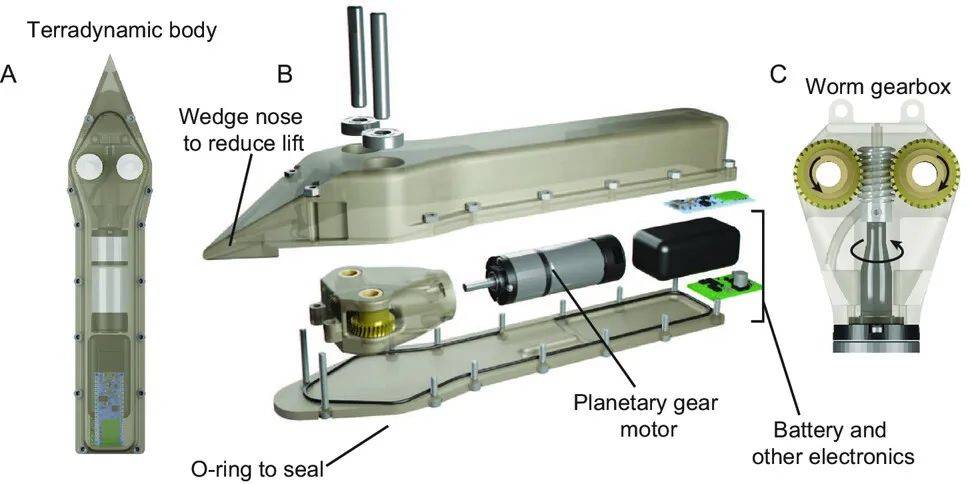
Also equipped with a set of "foil-like surfaces" mounted on either side of the robot's nose, this device acts like a submarine's dive plane, pushing the robot downward to offset its upward trajectory.

In addition to maintaining forward horizontal movement, the robot can turn left or right in the sand, and it can be remotely controlled via Wi-Fi to turn left or right by independently varying the thrust of its attachments. While its footrests are currently fixed-angle, they could be adjusted in the future to allow the robot to move up and down as needed.
▍What should I do if I encounter an obstacle?
The movement problem is solved, but what should we do if we encounter obstacles?
In fact, in addition to swimming, the robot's two arms also have the function of detecting obstacles. It does this by sensing the increasing resistance of the surrounding quicksand while moving. When it senses an obstacle, it takes appropriate steps to avoid collision or go around the obstacle.
However, currently only obstacles on the sides and above the robot can be detected. As for the front and bottom, the developers are still making continuous improvements. Future versions of the "Little Turtle" may have more powerful obstacle sensing and obstacle avoidance capabilities.
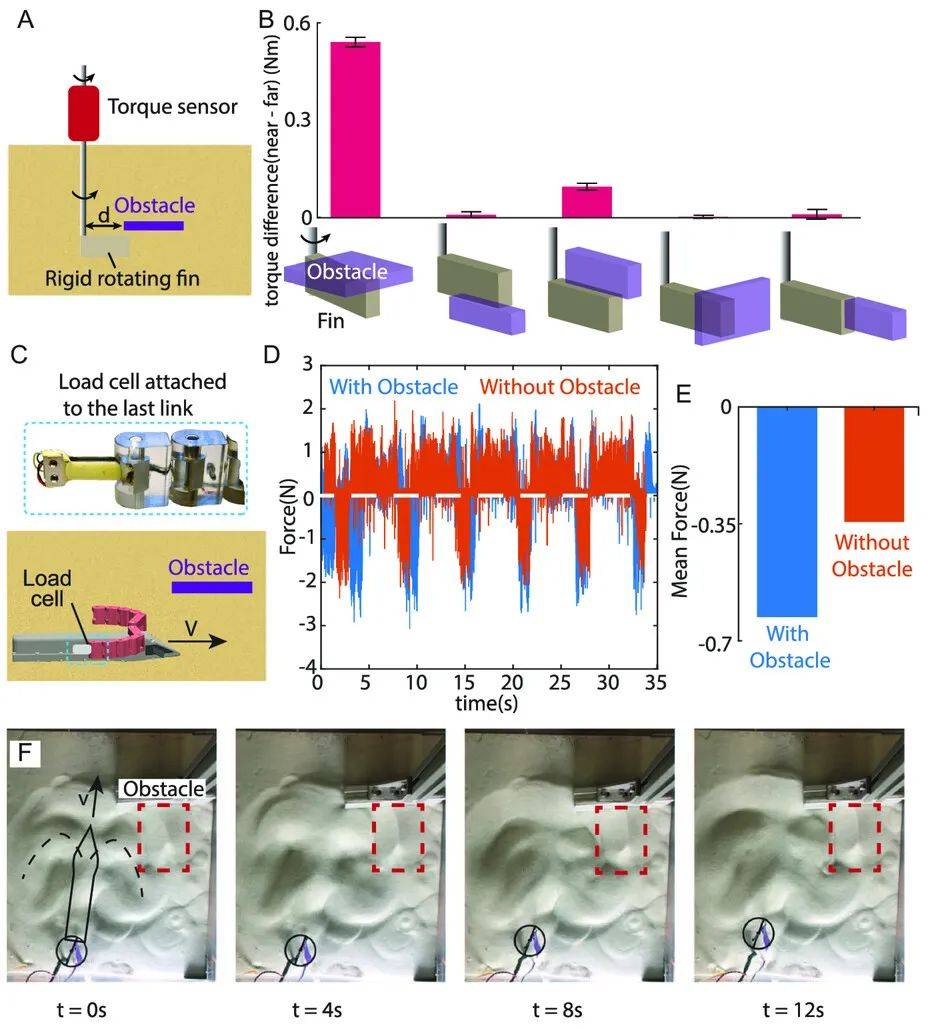
Currently, the "Little Turtle" robot can move horizontally on the sand at a speed of about 4 meters per hour at a depth of 12.7 centimeters. However, its speed is very slow, similar to the moving speed of other underground animals such as worms and clams.
Although relatively slow, this speed may be sufficient for some tasks, especially where careful movement is required to avoid damaging the surrounding environment or sensor equipment.
Developing such a robot faces many technical challenges, including mechanical design, sensor technology, control systems and software development. With the continuous advancement of technology, the possibility of robots performing tasks in various complex environments will continue to increase
▍Further improve the speed and may be used in space in the future
Currently, people don’t know enough about how robots with limbs move underground. Small robots like this not only open up new ideas for the design of underground robots, but can also be used in many scenarios, such as soil sampling, Underground exploration, search and rescue work, etc.
The research was published in Advanced Intelligent Systems under the title "Toward Robotic Sensing and Swimming in Granular Environments using Underactuated Appendages" ).
The robot has been tested in a tank filled with sand in the laboratory and in the sand of a coastal beach in La Jolla, California. In the future, researchers will further optimize its swimming speed in the sand and increase the angle of its body so that it can achieve all-round underground movement forward, backward, left and right, and up and down
In the future, the application of robots may open up new avenues for space exploration. This is because robots can not only perform various tasks in space, but also immobilize themselves in the medium, which makes sense in the low gravity environment of space. Therefore, robots have huge potential in space applications
The above is the detailed content of Turtle-inspired robots developed at the University of California may be used for future space exploration. For more information, please follow other related articles on the PHP Chinese website!