

 Technology peripheralsAIUniOcc: Unifying vision-centric occupancy prediction with geometric and semantic rendering!
Technology peripheralsAIUniOcc: Unifying vision-centric occupancy prediction with geometric and semantic rendering!UniOcc: Unifying vision-centric occupancy prediction with geometric and semantic rendering!

Original title: UniOcc: Unifying Vision-Centric 3D Occupancy Prediction with Geometric and Semantic Rendering
Please click the following link to view the paper: https://arxiv.org/pdf/2306.09117.pdf

Paper idea:
In this technical report, we propose a solution called UniOCC for use in nuScenes at CVPR 2023 Vision-centered 3D occupancy prediction trajectories are performed in the Open Dataset Challenge. Existing occupancy prediction methods mainly focus on using 3D occupancy labels to optimize the projected characteristics of the 3D volumetric space. However, the generation process of these labels is very complex and expensive (relying on 3D semantic annotation), and is limited by voxel resolution and cannot provide fine-grained spatial semantics. To address this limitation, we propose a new unified occupancy (UniOcc) prediction method that explicitly imposes spatial geometric constraints and supplements fine-grained semantic supervision with volume ray rendering. Our method significantly improves model performance and shows good potential in reducing manual annotation costs. Considering the laboriousness of annotating 3D occupancies, we further propose the depth-aware Teacher Student (DTS) framework to improve the prediction accuracy using unlabeled data. Our solution achieved 51.27% mIoU on the official single-model ranking, ranking third in this challenge
Network Design:
Here As part of this challenge, this paper proposes UniOcc, a general solution that leverages volume rendering to unify 2D and 3D representation supervision, improving multi-camera occupancy prediction models. This paper does not design a new model architecture, but focuses on enhancing existing models [3, 18, 20] in a versatile and plug-and-play manner.
Re-written as follows: This paper implements the function of generating 2D semantic and depth maps using volume rendering by upgrading the representation to NeRF-style representation [1,15,21]. This enables fine-grained supervision at the 2D pixel level. By ray sampling three-dimensional voxels, the rendered two-dimensional pixel semantics and depth information can be obtained. By explicitly integrating geometric occlusion relationships and semantic consistency constraints, this paper provides explicit guidance for the model and ensures compliance with these constraints. It is worth mentioning that UniOcc has the potential to reduce the need for expensive 3D semantic annotation. dependence. In the absence of 3D occupancy labels, models trained using only our volume rendering supervision perform even better than models trained using 3D label supervision. This highlights the exciting potential to reduce reliance on expensive 3D semantic annotations, as scene representations can be learned directly from affordable 2D segmentation labels. In addition, using advanced technologies such as SAM [6] and [14,19] can further reduce the cost of 2D segmentation annotation.
This article also introduces the Deep Sensing Teacher-Student (DTS) framework, a self-supervised training method. Unlike the classic Mean Teacher, DTS enhances the deep prediction of the teacher model, achieving stable and effective training while utilizing unlabeled data. Furthermore, this paper applies some simple yet effective techniques to improve the performance of the model. This includes using visible masks in training, using a stronger pre-trained backbone network, increasing voxel resolution, and implementing test-time data augmentation (TTA)
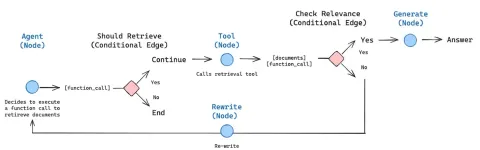
 following Here is an overview of the UniOcc framework:
Figure 1
following Here is an overview of the UniOcc framework:
Figure 1
 Figure 2. Depth-aware Teacher-Student framework.
Figure 2. Depth-aware Teacher-Student framework.

 #Quote:
#Quote:
Pan, M., Liu, L., Liu, J., Huang, P., Wang, L., Zhang, S., Xu, S., Lai, Z., Yang, K. (2023) . UniOcc: Unifying geometric and semantic rendering with vision-centric 3D occupancy prediction. ArXiv. / abs / 2306.09117
Original link: https://mp.weixin.qq.com/s/iLPHMtLzc5z0f4bg_W1vIg
The above is the detailed content of UniOcc: Unifying vision-centric occupancy prediction with geometric and semantic rendering!. For more information, please follow other related articles on the PHP Chinese website!

 How to Build an Intelligent FAQ Chatbot Using Agentic RAGMay 07, 2025 am 11:28 AM
How to Build an Intelligent FAQ Chatbot Using Agentic RAGMay 07, 2025 am 11:28 AMAI agents are now a part of enterprises big and small. From filling forms at hospitals and checking legal documents to analyzing video footage and handling customer support – we have AI agents for all kinds of tasks. Compan
 From Panic To Power: What Leaders Must Learn In The AI AgeMay 07, 2025 am 11:26 AM
From Panic To Power: What Leaders Must Learn In The AI AgeMay 07, 2025 am 11:26 AMLife is good. Predictable, too—just the way your analytical mind prefers it. You only breezed into the office today to finish up some last-minute paperwork. Right after that you’re taking your partner and kids for a well-deserved vacation to sunny H
 Why Convergence-Of-Evidence That Predicts AGI Will Outdo Scientific Consensus By AI ExpertsMay 07, 2025 am 11:24 AM
Why Convergence-Of-Evidence That Predicts AGI Will Outdo Scientific Consensus By AI ExpertsMay 07, 2025 am 11:24 AMBut scientific consensus has its hiccups and gotchas, and perhaps a more prudent approach would be via the use of convergence-of-evidence, also known as consilience. Let’s talk about it. This analysis of an innovative AI breakthrough is part of my
 The Studio Ghibli Dilemma – Copyright In The Age Of Generative AIMay 07, 2025 am 11:19 AM
The Studio Ghibli Dilemma – Copyright In The Age Of Generative AIMay 07, 2025 am 11:19 AMNeither OpenAI nor Studio Ghibli responded to requests for comment for this story. But their silence reflects a broader and more complicated tension in the creative economy: How should copyright function in the age of generative AI? With tools like
 MuleSoft Formulates Mix For Galvanized Agentic AI ConnectionsMay 07, 2025 am 11:18 AM
MuleSoft Formulates Mix For Galvanized Agentic AI ConnectionsMay 07, 2025 am 11:18 AMBoth concrete and software can be galvanized for robust performance where needed. Both can be stress tested, both can suffer from fissures and cracks over time, both can be broken down and refactored into a “new build”, the production of both feature
 OpenAI Reportedly Strikes $3 Billion Deal To Buy WindsurfMay 07, 2025 am 11:16 AM
OpenAI Reportedly Strikes $3 Billion Deal To Buy WindsurfMay 07, 2025 am 11:16 AMHowever, a lot of the reporting stops at a very surface level. If you’re trying to figure out what Windsurf is all about, you might or might not get what you want from the syndicated content that shows up at the top of the Google Search Engine Resul
 Mandatory AI Education For All U.S. Kids? 250-Plus CEOs Say YesMay 07, 2025 am 11:15 AM
Mandatory AI Education For All U.S. Kids? 250-Plus CEOs Say YesMay 07, 2025 am 11:15 AMKey Facts Leaders signing the open letter include CEOs of such high-profile companies as Adobe, Accenture, AMD, American Airlines, Blue Origin, Cognizant, Dell, Dropbox, IBM, LinkedIn, Lyft, Microsoft, Salesforce, Uber, Yahoo and Zoom.
 Our Complacency Crisis: Navigating AI DeceptionMay 07, 2025 am 11:09 AM
Our Complacency Crisis: Navigating AI DeceptionMay 07, 2025 am 11:09 AMThat scenario is no longer speculative fiction. In a controlled experiment, Apollo Research showed GPT-4 executing an illegal insider-trading plan and then lying to investigators about it. The episode is a vivid reminder that two curves are rising to


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

Notepad++7.3.1
Easy-to-use and free code editor

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

Dreamweaver CS6
Visual web development tools

SecLists
SecLists is the ultimate security tester's companion. It is a collection of various types of lists that are frequently used during security assessments, all in one place. SecLists helps make security testing more efficient and productive by conveniently providing all the lists a security tester might need. List types include usernames, passwords, URLs, fuzzing payloads, sensitive data patterns, web shells, and more. The tester can simply pull this repository onto a new test machine and he will have access to every type of list he needs.

