


An article talks about how ADAS system sensors should be arranged

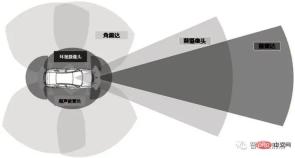
This article first introduces the importance of sensor placement strategy in advanced driving assistance systems, and proposes advanced driving assistance system sensor types, including forward-looking smart cameras, forward-facing and side-facing millimeter wave radars (77 GHz/22 GHz ), ultrasonic radar and surround-view camera, briefly describe the performance characteristics of each sensor. Then, taking a current mass production supplier's solution as an example, different sensor performance parameters are introduced in detail, including detection distance, detection range and requirements for the external layout environment. This paper introduces the functions that can be achieved by using different sensors on vehicles alone and the fusion strategies of different sensors with different driving assistance levels and different function combinations. Finally, it introduces how to reasonably install different sensors on the vehicle. Based on the required performance requirements and detection range redundancy, a specific implementation plan is proposed, and its layout requirements are analyzed and explained in detail.
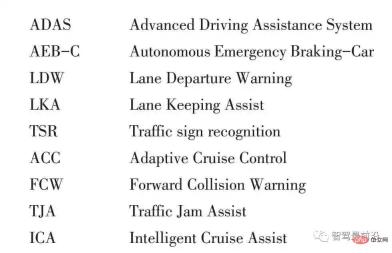
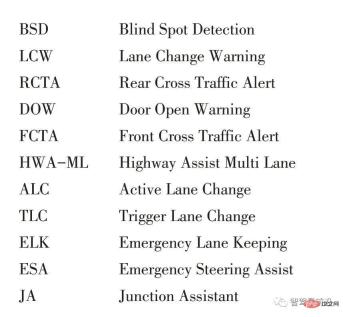
##Abbreviations
With the advancement of science and technology and the rapid development of autonomous driving technology, more and more cars are currently equipped with advanced driving assistance systems or assisted driving systems. Autonomous driving vehicles are classified as level five autonomous driving in the SAE J3016TM autonomous driving level. Autonomous driving uses a variety of sensors (ultrasonic radar, millimeter-wave radar, smart cameras, high-definition/standard-definition cameras, lidar, etc.). Wang Tian et al. conducted research on the main sensors such as cameras, lidar, and millimeter-wave radar in the autonomous driving perception system. Function introduction. Yuan Xiuzhen analyzed the autonomous vehicle sensor technology industry and elaborated on the important hardware applications, such as lidar, cameras, ultrasonic sensing, etc. In the development value chain for autonomous driving, the development of sensor parts is mainly concentrated at domestic and foreign auto parts suppliers, while the integration of vehicle functions is completed by the OEM.
Zhang Yanyong et al. proposed an autonomous driving perception fusion algorithm based on multi-modal fusion. Many engineers tend to focus their development efforts on algorithm development and system design, but what often happens is, The successfully applied sensor hardware and software strategies work very well on some OEM models, but have average or even negative effects on other OEMs. This is because in autonomous driving research and development, consideration of every link is essential. As a closed-loop development, a good algorithm is based on accurate detection of sensor front-end sensing. Various types of hardware sensors have different requirements for sensor detection performance. A particularly important point that affects detection performance is the placement and placement of sensors. Way. This article gives a brief introduction to the layout method based on the detection performance characteristics of the sensors used in autonomous driving.
Advanced Driving Assistance System Sensor IntroductionAdvanced Driving Assistance System (ADAS) uses sensors to sense the surrounding environment in real time while the car is driving. , collect data, sense fusion and perform decision-making analysis on the sensed data, and finally control the vehicle and provide early warning to the driver.
Cameras can obtain rich environmental information including object color, shape, material, etc., and 2D computer vision has made a lot of progress. There are many advanced algorithms in this field for signal light detection, object detection, etc. Classification etc. Millimeter wave radar can obtain accurate distance information, has strong penetrating ability, can resist the influence of weather and environmental changes, and can realize long-distance sensing and detection.
Currently, there are 4 types of sensors on mass-produced autonomous vehicles, with a total of 22 sensors (Table 1).
Front-viewing smart cameras: Commonly used are single, double and triple cameras. They are mainly used in medium and long-distance scenes. They can identify clear lane lines, traffic signs, obstacles and pedestrians, but are not suitable for Lighting, weather and other conditions are very sensitive and require complex algorithm support and relatively high processor requirements.
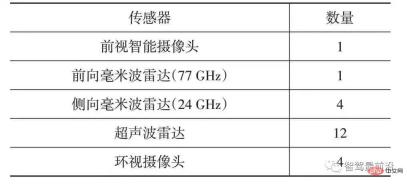
Table 1 Advanced Driving Assistance System Sensor Classification
Millimeter wave radar: There are mainly two types: 24 GHz radar for medium and short range measurement and 77 GHz radar for long range measurement. Millimeter wave radar can effectively extract depth of field and speed information, identify obstacles, and has a certain ability to penetrate fog, smoke and dust. However, in the case of complex environmental obstacles, because millimeter waves rely on sound waves for positioning, sound waves appear diffusely reflected. As a result, the missed detection rate and error rate are relatively high.
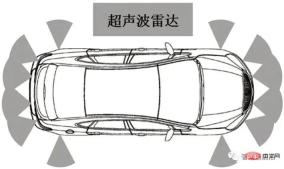
Ultrasonic radar: Mainly used in short-distance scenarios, sending ultrasonic waves and receiving reflected ultrasonic signals, and sending the detection results to the controller. The energy consumption of ultrasonic waves is slow, the penetration is strong, the distance measurement method is simple, and the cost is low. However, it has certain limitations in measuring distance at very high speeds. When a car is traveling at high speed, ultrasonic ranging cannot keep up with the real-time changes in the distance between the cars, and the error is large. Ultrasonic waves have a large scattering angle and poor directivity. When measuring distant targets, their echo signals will be relatively weak, affecting measurement accuracy. However, in short-distance measurements, ultrasonic ranging sensors have great advantages.
Surround view camera: It is mainly used in short-distance scenes and can identify obstacles, but is very sensitive to external conditions such as light and weather. The technology is mature and the price is low. With the continuous development and progress of technology, the pixels of cameras are gradually increasing, from the initial 300,000 pixels to the current 1 million pixels. In the next three years, 2 million pixel cameras will become popular.
Sensor implementation function configuration combination
The combination of different sensors of the advanced driving assistance system can achieve different functions. The 22 sensors introduced above are all equipped on The whole vehicle can realize ADASL1/L2/L3. The detailed sub-functions are introduced below.
Forward-facing smart camera and forward-facing millimeter wave radar
The forward-facing smart camera implements AEB-C (Automatic Emergency Braking-Car), LDW (Lane Departure Warning) ), LKA (lane keeping assist), TSR (traffic sign recognition), to achieve L1 level driving assistance. The actual road condition detection is accurate (such as lane lines, tunnels, ramps, speed limits, etc.), but the distance detection is not accurate. Its representative performance parameters are shown in Table 2.
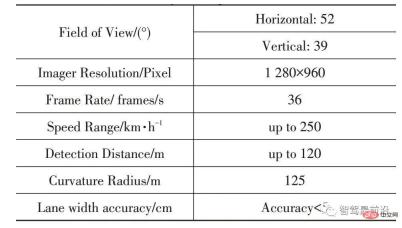
Table 2 Mobileye EYEQ3 partial performance parameters
Forward millimeter wave Radar (77 GHz) implements ACC (Adaptive Cruise), AEB-C (Automatic Emergency Braking-Car), FCW (Forward Collision Warning), and achieves L1 level driving assistance. Distance detection is accurate, but it cannot predict actual conditions (such as lane lines, tunnels, ramps, speed limits, etc.). Its representative performance parameters are shown in Table 3.
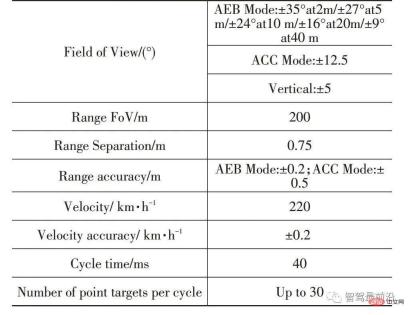
Table 3 Some performance parameters of AC1000
Forward-facing smart camera and Forward millimeter wave radar fusion realizes ACC, AEB-C/P automatic emergency braking (vehicle/person), LDW, LKA, TSR, TJA (traffic jam assist), ICA (intelligent cruise assist), and can achieve L2 level driving Auxiliary (Figure 1). Distance and road information are all fused data, and the detection is accurate. The comparison of single radar, single camera and fusion solution is shown in Table 4.
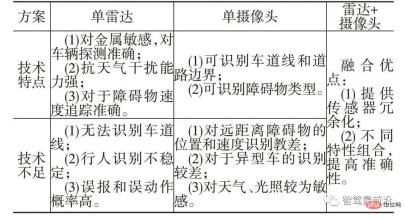
Table 4 Comparison of single radar, single camera and fusion solutions
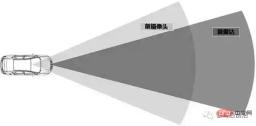
Figure 1 Fusion of forward-facing smart camera and forward-facing millimeter wave radar
Side-facing millimeter wave radar (angle radar)
Side-facing millimeter wave radar (24 GHz) implements the blind zone monitoring function, and there are 2 implementation methods. There are 2 millimeter-wave radars on the rear side to implement BSD (blind spot monitoring), LCW (lane change collision warning), RCTA (rear traffic crossing warning) and DOW (door opening warning) functions; 2 millimeter-wave radars on the rear side and 2 on the front side In addition to realizing the above functions, millimeter wave radar can also realize FCTA (forward cross traffic alert) and support advanced driving assistance functions above L2 level. With the advancement of science and technology, the performance of lateral millimeter wave radar is also gradually improving, see Table 5.

Table 5 Partial parameters and development of side millimeter wave radar
The combination of side-facing millimeter-wave radars (4 pieces), forward-facing millimeter-wave radars (1 piece), and forward-facing smart cameras (1 piece) can achieve L2 (or L3-) level autonomous driving. In L2 level autonomous driving, TJA/HWAML (Highway Driving Assist - Multi-lane), ALC (Active Lane Change Assist), TLC (Triggered Lane Change Assist), ELK (Emergency Lane Keeping), and ESA (Emergency Steering Assist) are added ), JA (intersection assist), all-round warning (including BSD/DOW/RCTA/FCTA/LCW) (Figure 2). It can realize automatic driving function under highway conditions.
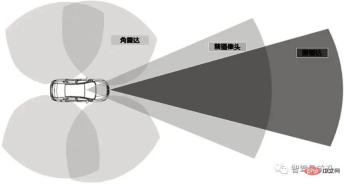
##Figure 2 Fusion of forward camera, forward millimeter wave radar, and angle radar
ULTRASONIC RADARAccording to the characteristics of ultrasonic radar short-distance detection of targets (Table 6), ultrasonic radar can realize PDC (reversing radar), APA (automatic parking assist) and BSD (Blind Spot Detection) function. Four ultrasonic radars are installed on the rear bumper to realize the PDC function. Some vehicles have four ultrasonic radars installed on the front bumper at the same time (a total of 8 ultrasonic radars at the front and rear) to detect obstacles ahead when reversing. Four ultrasonic radars are installed on the sides of the front and rear bumpers to realize the close-range blind spot monitoring function. At the same time, combined with 8 ultrasonic radars at the front and rear, a total of 12 ultrasonic radars can realize the APA function. If a millimeter-wave angle radar is installed on the side of the vehicle to implement the BSD function, there is no need to install the ultrasonic radar on the side. The main reason for BSD to install ultrasonic radar is its cost advantage. The different combinations and functions of ultrasonic radar are shown in Figure 3.
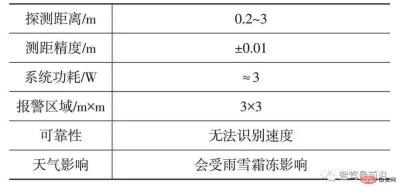
Table 6 Some parameters and characteristics of ultrasonic radar
##Figure 3 Ultrasonic radar solution layoutSurround view camera
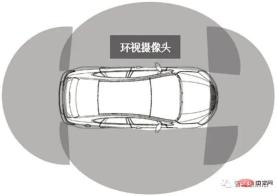
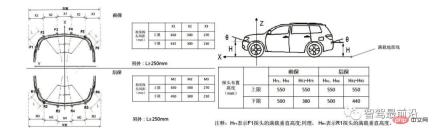
AVM (panoramic surveillance imaging system) passes through the front, rear, left and right 4 An image sensor (surround view camera) collects vehicle surrounding environment data and transmits the image to the panoramic image controller through CVBS (standard definition)/LVDS (high definition). If only one camera is installed at the rear, the reversing image function can be realized. If four cameras are installed on the front, rear, left, and right at the same time, distortion correction and cropping of the input images from the four cameras will be performed to achieve integration of four views and 2D top view effects, integration of 3D rotation effects (HD solution), and finally display through MP5. Some important parameters of the surround-view camera are shown in Table 7, and their layout is shown in Figure 4 of the entire vehicle.Sensor vehicle layout fusion
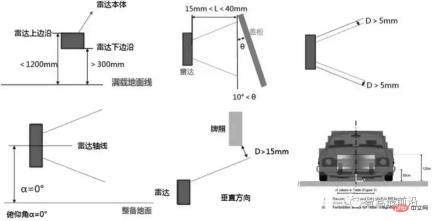
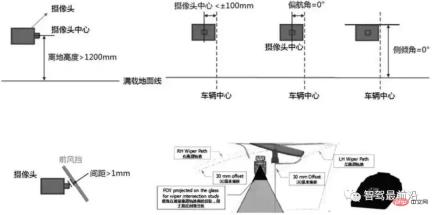
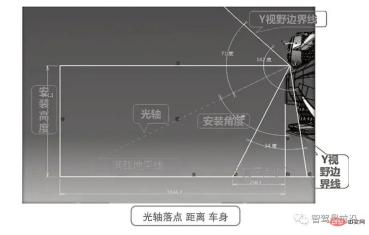
The combined layout of different sensors in advanced driving assistance systems needs to take into account coverage and redundancy. The sensing ranges of different sensors have their own advantages and limitations. The current development trend is to use sensor information fusion technology to make up for the shortcomings of a single sensor and improve the safety and reliability of the entire intelligent driving system. Coverage: 360° of the vehicle body needs to be covered. Depending on the importance, the detection distance at the front is longer (120 m), the detection distance at the rear is slightly shorter (80 m), and the detection distance on the left and right sides is the shortest (20 m). In order to ensure security, each area needs to be covered by 2 or more sensors for mutual verification. Figure 5 shows the layout plan.Table 7 Some parameters of the surround view camera Figure 4 Surround view camera layout ##Figure 5 Sensor layout fusion diagram The front radar installation position is set according to the radar performance parameter requirements and body shape, and a reasonable layout position is set. The radar height above the ground (the distance from the radar antenna axis to the ground) is recommended to be 50 cm, and anything between 30 cm and 120 cm is acceptable. Heights close to 30 cm above the ground may have excessive ground reflected signals that interfere with direct signal reception and reduce the risk of detection. The distance between the radar and the protective cover is greater than 15 mm (2 times the wavelength, which can avoid the influence of complex near fields on the radar beam) and less than 40 mm (to avoid an excessively large intersection surface of radar waves). The radar lateral position coordinates are between -30 cm and 30 cm. If the radar is installed with a front cover, it also has special requirements for the cover, such as a radius of curvature > 600 mm, a uniform thickness at the intersection of the beam and the cover, a profile that needs to undergo simulation testing, a material that needs to be tested for electrical properties, and non-sprayed parts, etc. The distance between the millimeter-wave radar beam and the surrounding structure is >5 mm, the angle with the vehicle - pitch angle, yaw angle, and roll angle is 0°, and the distance between the radar FOV and the license plate frame is more than 15 mm, so as to avoid affecting radar detection after installing the license plate, etc. As shown in Figure 6. Figure 6 Forward millimeter wave radar layout Front camera The best vertical installation position is in the center of the windshield, with a height of more than 1,200 mm. The offset from the center line of the windshield is allowed to be within 10 cm. The yaw angle, roll angle, and pitch angle are preferably near 0° (±3°). The bracket should be installed in a clean glass area, and the viewing area should not be blocked by silk screen or printing. The distance between the camera window and the wiper track line should be greater than 30 mm, and the gap between the lens module and the windshield should be at least 1 mm. The openings should be determined by the angle of view projected on each layer of the windshield. Ventilation holes (opening area greater than 120 mm2) should be designed on the camera bracket and cover to ensure air circulation. The position tolerance of the bracket when mounted on the windshield is usually ±1 mm (positioning) and ±2.5° (rotation) (Fig. 7). Angle radar sets a reasonable layout based on its performance parameter requirements and body shape For layout location, the car body should reserve space for layout. Requirements for the height of the angle radar arrangement: If it is too low, mud, water and dirt will affect the radar; if it is too high, the blind area close to the vehicle will become larger (which may result in no field of view beyond ±20°). The recommended height is between 400 mm and 1,000 mm. To minimize the blind area, the angle between the radar and the longitudinal axis of the vehicle should be between 30° and 45°, and the angle between the radar and the horizontal plane of the vehicle is best controlled at 90°. There is no metal, ridges, multi-layer structures or materials in the radar FOV field of view. The maximum angle between the FOV and the cover is 70°. The cover must be flat and the curvature must be greater than 350 mm. Figure 7 Front camera layout diagram In order to realize the APA function, 12 ultrasonic radars must be arranged on the entire vehicle, and the number of arrangements is relatively large. The ultrasonic radar sensor is mounted on the mounting bracket and fixed by bonding with the bumper skin. In order to meet the detection requirements to the greatest extent, the ultrasonic radar layout location provides specific requirements, see Figure 8. The specific requirements for the layout include: avoid placing the radar on the surface of the car bumper, avoid taking photos that interfere with the radar detection area, keep away from heat source exhaust pipes, high-power lamps, etc. Figure 8 Ultrasonic radar layout location requirements AVM surround view system requires a total of 4 cameras arranged at the front, rear, left and right of the car body. The front camera is installed in the area near the front grille. The rear camera is installed on or near the rear door license plate light. The left and right cameras need to be installed at the bottom of the rearview mirror housing, and a camera hole needs to be reserved in the left and right rearview mirrors to facilitate the installation of the left and right cameras. Optical calibration should be carried out when the cameras are arranged to ensure that the images of adjacent cameras have sufficient overlap, and the image splicing should be able to ensure that there are no black edges within the 1° assembly error range of the camera, and the blind area should not exceed the requirements of corporate standards. In order to prevent the panoramic image from being spliced due to changes in the captured image, the camera should have an anti-rotation positioning structure. Front and rear camera layout requirements: When the vehicle is fully loaded, the height above the ground is ≥ 600 mm; the distance from the center plane is ≤ 50 mm, it is recommended to place it on the center plane; the visual axis is parallel to the XZ plane of the vehicle; The angle between the visual axis and the Z-axis of the vehicle is recommended to be 45° to 75°. The intersection point of the optical axis and the ground line is 1 000 to 2 000 mm from the outermost side of the vehicle body; the blind spot field of view is ≤ 200 mm; the vertical field of view of the camera can be completely seen at 3 000 mm An object 3 000 mm high standing upright on the ground. Figure 9 shows the layout requirements for the surround-view camera (front). Figure 9 Surround camera (front) layout requirements Left and right cameras (On the rearview mirror) Arrangement requirements: front view of the camera, the angle between the angle of view and the vertical line is recommended to be 20 to 25°; the angle between the angle of view and the vertical line is recommended to be 1.5 to 5°; the installation height is greater than 900 mm; the protruding distance from the vehicle body Greater than 100 mm; the field of view must cover 10 m at the front and rear of the vehicle, and the distance between the 10 m field of view and the lower edge of the rearview mirror housing is greater than 1 mm, and the angle between the 5 m front and rear field of view and the optical axis is less than 85°. And the minimum distance between the 5 m field of view and the lower edge of the rearview mirror housing is greater than 1.2 mm; the camera protrusion is less than 5 mm (adjustable). In addition to ensuring the coverage redundancy of the detection range, the sensors of the advanced driving assistance system must also meet the installation conditions of each sensor and vehicle during actual installation. The sensor layout parameters introduced in this article are summarized and fused based on a certain car model and sensor products from a specific supplier. Different sensor suppliers will have slightly different layout requirements. During the actual vehicle model layout process, adaptive adjustments must be made based on the layout requirements provided by the supplier, as well as the layout and shape of the vehicle. 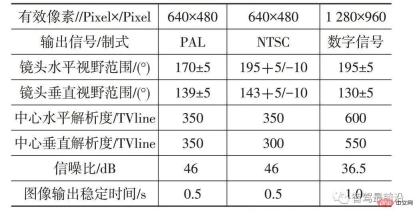
Integration of layout of forward-facing smart camera and forward-facing millimeter wave radar
Lateral millimeter wave radar (angle radar) layout and fusion
Ultrasonic radar layout fusion
Surround view camera
The above is the detailed content of An article talks about how ADAS system sensors should be arranged. For more information, please follow other related articles on the PHP Chinese website!

 MarkItDown MCP Can Convert Any Document into Markdowns!Apr 27, 2025 am 09:47 AM
MarkItDown MCP Can Convert Any Document into Markdowns!Apr 27, 2025 am 09:47 AMHandling documents is no longer just about opening files in your AI projects, it’s about transforming chaos into clarity. Docs such as PDFs, PowerPoints, and Word flood our workflows in every shape and size. Retrieving structured
 How to Use Google ADK for Building Agents? - Analytics VidhyaApr 27, 2025 am 09:42 AM
How to Use Google ADK for Building Agents? - Analytics VidhyaApr 27, 2025 am 09:42 AMHarness the power of Google's Agent Development Kit (ADK) to create intelligent agents with real-world capabilities! This tutorial guides you through building conversational agents using ADK, supporting various language models like Gemini and GPT. W
 Use of SLM over LLM for Effective Problem Solving - Analytics VidhyaApr 27, 2025 am 09:27 AM
Use of SLM over LLM for Effective Problem Solving - Analytics VidhyaApr 27, 2025 am 09:27 AMsummary: Small Language Model (SLM) is designed for efficiency. They are better than the Large Language Model (LLM) in resource-deficient, real-time and privacy-sensitive environments. Best for focus-based tasks, especially where domain specificity, controllability, and interpretability are more important than general knowledge or creativity. SLMs are not a replacement for LLMs, but they are ideal when precision, speed and cost-effectiveness are critical. Technology helps us achieve more with fewer resources. It has always been a promoter, not a driver. From the steam engine era to the Internet bubble era, the power of technology lies in the extent to which it helps us solve problems. Artificial intelligence (AI) and more recently generative AI are no exception
 How to Use Google Gemini Models for Computer Vision Tasks? - Analytics VidhyaApr 27, 2025 am 09:26 AM
How to Use Google Gemini Models for Computer Vision Tasks? - Analytics VidhyaApr 27, 2025 am 09:26 AMHarness the Power of Google Gemini for Computer Vision: A Comprehensive Guide Google Gemini, a leading AI chatbot, extends its capabilities beyond conversation to encompass powerful computer vision functionalities. This guide details how to utilize
 Gemini 2.0 Flash vs o4-mini: Can Google Do Better Than OpenAI?Apr 27, 2025 am 09:20 AM
Gemini 2.0 Flash vs o4-mini: Can Google Do Better Than OpenAI?Apr 27, 2025 am 09:20 AMThe AI landscape of 2025 is electrifying with the arrival of Google's Gemini 2.0 Flash and OpenAI's o4-mini. These cutting-edge models, launched weeks apart, boast comparable advanced features and impressive benchmark scores. This in-depth compariso
 How to Generate and Edit Images Using OpenAI gpt-image-1 APIApr 27, 2025 am 09:16 AM
How to Generate and Edit Images Using OpenAI gpt-image-1 APIApr 27, 2025 am 09:16 AMOpenAI's latest multimodal model, gpt-image-1, revolutionizes image generation within ChatGPT and via its API. This article explores its features, usage, and applications. Table of Contents Understanding gpt-image-1 Key Capabilities of gpt-image-1
 How to Perform Data Preprocessing Using Cleanlab? - Analytics VidhyaApr 27, 2025 am 09:15 AM
How to Perform Data Preprocessing Using Cleanlab? - Analytics VidhyaApr 27, 2025 am 09:15 AMData preprocessing is paramount for successful machine learning, yet real-world datasets often contain errors. Cleanlab offers an efficient solution, using its Python package to implement confident learning algorithms. It automates the detection and
 The AI Skills Gap Is Slowing Down Supply ChainsApr 26, 2025 am 11:13 AM
The AI Skills Gap Is Slowing Down Supply ChainsApr 26, 2025 am 11:13 AMThe term "AI-ready workforce" is frequently used, but what does it truly mean in the supply chain industry? According to Abe Eshkenazi, CEO of the Association for Supply Chain Management (ASCM), it signifies professionals capable of critic


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

ZendStudio 13.5.1 Mac
Powerful PHP integrated development environment

