
 Technology peripheralsAIConvNeXt V2 is here, using only the simplest convolution architecture, the performance is not inferior to Transformer
Technology peripheralsAIConvNeXt V2 is here, using only the simplest convolution architecture, the performance is not inferior to Transformer
After decades of basic research, the field of visual recognition has ushered in a new era of large-scale visual representation learning. Pretrained large-scale vision models have become an essential tool for feature learning and vision applications. The performance of a visual representation learning system is greatly affected by three main factors: the model's neural network architecture, the method used to train the network, and the training data. Improvements in each factor contribute to improvements in overall model performance.
Innovation in neural network architecture design has always played an important role in the field of representation learning. The convolutional neural network architecture (ConvNet) has had a significant impact on computer vision research, enabling the use of universal feature learning methods in various visual recognition tasks without relying on manually implemented feature engineering. In recent years, the transformer architecture, originally developed for natural language processing, has also become widely used in other deep learning fields because of its suitability for models and datasets of different sizes.
The emergence of the ConvNeXt architecture modernizes the traditional ConvNet, proving that pure convolutional models can also adapt to changes in model and dataset size. However, the most common way to explore the design space of neural network architectures is still to benchmark the performance of supervised learning on ImageNet.
Another way of thinking is to shift the focus of visual representation learning from labeled supervised learning to self-supervised pre-training. Self-supervised algorithms introduced masked language modeling into the field of vision and quickly became a popular method for visual representation learning. However, self-supervised learning typically uses an architecture designed for supervised learning and assumes that the architecture is fixed. For example, Masked Autoencoder (MAE) uses a visual transformer architecture.
One approach is to combine these architectures with a self-supervised learning framework, but this will face some specific problems. For example, the following problem arises when combining ConvNeXt with MAE: MAE has a specific encoder-decoder design that is optimized for the sequence processing capabilities of the transformer, which makes the computationally intensive encoder focus on those visible patch, thereby reducing pre-training costs. But this design may be incompatible with standard ConvNet, which uses dense sliding windows. Furthermore, without considering the relationship between architecture and training objectives, it is unclear whether optimal performance can be achieved. In fact, existing research shows that it is difficult to train ConvNet with mask-based self-supervised learning, and experimental evidence shows that transformer and ConvNet may diverge in feature learning, which will affect the quality of the final representation.
To this end, researchers from KAIST, Meta, and New York University (including Liu Zhuang, first author of ConvNeXt, and Xie Saining, first author of ResNeXt) proposed to jointly design network architecture and masked autoencoding under the same framework The purpose of this is to enable mask-based self-supervised learning to be applied to the ConvNeXt model and obtain results comparable to the transformer.

##Paper address: https://arxiv.org/pdf/2301.00808v1.pdf
When designing the masked autoencoder, this research treats the input with the mask as a set of sparse patches and uses sparse convolution to process the visible parts. The idea was inspired by the use of sparse convolutions when processing large-scale 3D point clouds. Specifically, this research proposes implementing ConvNeXt with sparse convolutions, and then during fine-tuning, the weights can be converted back to standard dense network layers without special processing. To further improve pre-training efficiency, this study replaces the transformer decoder with a single ConvNeXt, making the entire design fully convolutional. The researchers observed that after adding these changes: the learned features were useful and improved the baseline results, but the fine-tuned performance was still inferior to the transformer-based model.
The study then analyzes the feature space of ConvNeXt with different training configurations. When training ConvNeXt directly on masked inputs, researchers found potential feature collapse problems in the MLP layer. In order to solve this problem, this study proposes to add a global response normalization layer (Global Response Normalization layer) to enhance feature competition between channels. This improvement is most effective when the model is pretrained using a masked autoencoder, suggesting that reusing fixed architecture designs from supervised learning may not be the best approach.
Based on the above improvements, this study proposes ConvNeXt V2, which shows better performance when combined with masked autoencoders. At the same time, researchers found that ConvNeXt V2 has significant performance improvements over pure ConvNet on various downstream tasks, including classification tasks on ImageNet, target detection on COCO, and semantic segmentation on ADE20K.



Fully Convolutional Masked Autoencoder
The method proposed in this study is conceptually simple and is implemented in a fully convolutional manner In progress. The learning signal is generated by randomly masking the original visual input with a high mask ratio, and then letting the model predict the missing parts based on the remaining context. The overall framework is shown in the figure below.

The framework consists of a ConvNeXt encoder based on sparse convolution and a lightweight ConvNeXt decoder, where the structure of the autoencoder is Asymmetrical. The encoder only processes visible pixels, while the decoder uses encoded pixels and mask tokens to reconstruct the image. At the same time, the loss is only calculated in the masked area.
Global response normalization
There are many mechanisms in the brain that promote neuronal diversity. For example, lateral inhibition can help enhance the response of activated neurons, increasing the contrast and selectivity of individual neurons to stimuli while also increasing the response diversity of the entire population of neurons. In deep learning, this form of lateral inhibition can be achieved through response normalization. This study introduces a new response normalization layer called global response normalization (GRN), which aims to increase the contrast and selectivity between channels. The GRN unit consists of three steps: 1) global feature aggregation, 2) feature normalization, and 3) feature calibration. As shown in the figure below, GRN layers can be merged into the original ConvNeXt block.

The researchers found experimentally that when applying GRN, LayerScale is not necessary and can be deleted. Leveraging this new block design, the study created a variety of models with varying efficiencies and capacities, termed the ConvNeXt V2 model family, ranging from lightweight (Atto) to computationally intensive (Huge).
To evaluate the role of GRN, this study used the FCMAE framework to pre-train ConvNeXt V2. From the visual display in Figure 3 below and the cosine distance analysis in Figure 4, it can be observed that ConvNeXt V2 effectively alleviates the feature collapse problem. The cosine distance values are consistently high, indicating that feature diversity can be maintained during the transfer of network layers. This is similar to the ViT model pretrained using MAE. This shows that the learning behavior of ConvNeXt V2 is similar to ViT under a similar mask image pre-training framework.


The study further evaluated the fine-tuning performance, and the results are shown in the table below.

When equipped with GRN, the FCMAE pre-trained model can significantly outperform the supervised model trained using 300 epochs. GRN improves representation quality by enhancing feature diversity, which is crucial for mask-based pre-training and is absent in the ConvNeXt V1 model. It is worth noting that this improvement is achieved without adding additional parameter overhead and without increasing FLOPS.
Finally, the study also examines the importance of GRN in pre-training and fine-tuning. As shown in Table 2(f) below, performance drops significantly whether GRN is removed from fine-tuning or newly initialized GRN is added during fine-tuning, indicating that GRN is important in both pre-training and fine-tuning.

Interested readers can read the original text of the paper to learn more about the research details.
The above is the detailed content of ConvNeXt V2 is here, using only the simplest convolution architecture, the performance is not inferior to Transformer. For more information, please follow other related articles on the PHP Chinese website!

 从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM
从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM1 前言在发布DALL·E的15个月后,OpenAI在今年春天带了续作DALL·E 2,以其更加惊艳的效果和丰富的可玩性迅速占领了各大AI社区的头条。近年来,随着生成对抗网络(GAN)、变分自编码器(VAE)、扩散模型(Diffusion models)的出现,深度学习已向世人展现其强大的图像生成能力;加上GPT-3、BERT等NLP模型的成功,人类正逐步打破文本和图像的信息界限。在DALL·E 2中,只需输入简单的文本(prompt),它就可以生成多张1024*1024的高清图像。这些图像甚至
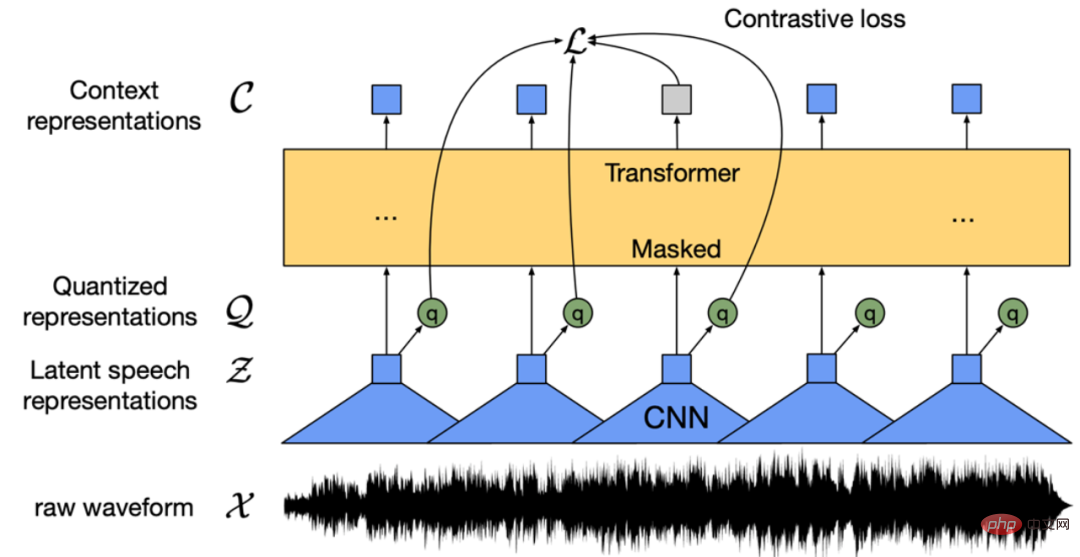 找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PM
找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PMWav2vec 2.0 [1],HuBERT [2] 和 WavLM [3] 等语音预训练模型,通过在多达上万小时的无标注语音数据(如 Libri-light )上的自监督学习,显著提升了自动语音识别(Automatic Speech Recognition, ASR),语音合成(Text-to-speech, TTS)和语音转换(Voice Conversation,VC)等语音下游任务的性能。然而这些模型都没有公开的中文版本,不便于应用在中文语音研究场景。 WenetSpeech [4] 是
 普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM
普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM“Making large models smaller”这是很多语言模型研究人员的学术追求,针对大模型昂贵的环境和训练成本,陈丹琦在智源大会青源学术年会上做了题为“Making large models smaller”的特邀报告。报告中重点提及了基于记忆增强的TRIME算法和基于粗细粒度联合剪枝和逐层蒸馏的CofiPruning算法。前者能够在不改变模型结构的基础上兼顾语言模型困惑度和检索速度方面的优势;而后者可以在保证下游任务准确度的同时实现更快的处理速度,具有更小的模型结构。陈丹琦 普
 解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM
解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM由于复杂的注意力机制和模型设计,大多数现有的视觉 Transformer(ViT)在现实的工业部署场景中不能像卷积神经网络(CNN)那样高效地执行。这就带来了一个问题:视觉神经网络能否像 CNN 一样快速推断并像 ViT 一样强大?近期一些工作试图设计 CNN-Transformer 混合架构来解决这个问题,但这些工作的整体性能远不能令人满意。基于此,来自字节跳动的研究者提出了一种能在现实工业场景中有效部署的下一代视觉 Transformer——Next-ViT。从延迟 / 准确性权衡的角度看,
 Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM
Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM3月27号,Stability AI的创始人兼首席执行官Emad Mostaque在一条推文中宣布,Stable Diffusion XL 现已可用于公开测试。以下是一些事项:“XL”不是这个新的AI模型的官方名称。一旦发布稳定性AI公司的官方公告,名称将会更改。与先前版本相比,图像质量有所提高与先前版本相比,图像生成速度大大加快。示例图像让我们看看新旧AI模型在结果上的差异。Prompt: Luxury sports car with aerodynamic curves, shot in a
 五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM
五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM人工智能就是一个「拼财力」的行业,如果没有高性能计算设备,别说开发基础模型,就连微调模型都做不到。但如果只靠拼硬件,单靠当前计算性能的发展速度,迟早有一天无法满足日益膨胀的需求,所以还需要配套的软件来协调统筹计算能力,这时候就需要用到「智能计算」技术。最近,来自之江实验室、中国工程院、国防科技大学、浙江大学等多达十二个国内外研究机构共同发表了一篇论文,首次对智能计算领域进行了全面的调研,涵盖了理论基础、智能与计算的技术融合、重要应用、挑战和未来前景。论文链接:https://spj.scien
 什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM
什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM译者 | 李睿审校 | 孙淑娟近年来, Transformer 机器学习模型已经成为深度学习和深度神经网络技术进步的主要亮点之一。它主要用于自然语言处理中的高级应用。谷歌正在使用它来增强其搜索引擎结果。OpenAI 使用 Transformer 创建了著名的 GPT-2和 GPT-3模型。自从2017年首次亮相以来,Transformer 架构不断发展并扩展到多种不同的变体,从语言任务扩展到其他领域。它们已被用于时间序列预测。它们是 DeepMind 的蛋白质结构预测模型 AlphaFold
 AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM
AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM说起2010年南非世界杯的最大网红,一定非「章鱼保罗」莫属!这只位于德国海洋生物中心的神奇章鱼,不仅成功预测了德国队全部七场比赛的结果,还顺利地选出了最终的总冠军西班牙队。不幸的是,保罗已经永远地离开了我们,但它的「遗产」却在人们预测足球比赛结果的尝试中持续存在。在艾伦图灵研究所(The Alan Turing Institute),随着2022年卡塔尔世界杯的持续进行,三位研究员Nick Barlow、Jack Roberts和Ryan Chan决定用一种AI算法预测今年的冠军归属。预测模型图


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

SublimeText3 English version
Recommended: Win version, supports code prompts!

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

Zend Studio 13.0.1
Powerful PHP integrated development environment

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

