

 Technology peripheralsAIA drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind
Technology peripheralsAIA drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the windA drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind

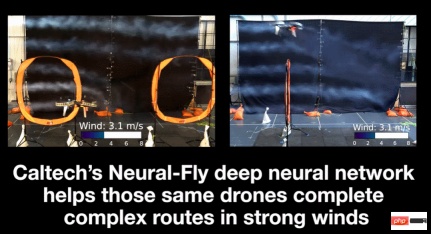
When the wind is strong enough to blow the umbrella, the drone is stable, like this:

Windflying is a part of flying in the air. From a large level, wind speed may bring challenges to pilots when they land their aircraft; from a small level, gusty winds will also affect the flight of drones.
Currently, drones either fly under controlled conditions, without wind, or are operated by humans using remote controls. Drones are controlled by researchers to fly in formations in the open sky, but these flights are usually conducted under ideal conditions and environments.
However, for drones to autonomously perform necessary but routine tasks, such as delivering packages, they must be able to adapt to wind conditions in real time.
To give drones better maneuverability when flying in the wind, a team of engineers from Caltech developed Neural-Fly, a deep neural network that An artificial intelligence tool that allows drones to remain agile in windy conditions by simply updating some key parameters to help drones respond to new and unknown wind conditions in real time.
At the beginning of the article, we have initially seen the wind resistance ability of UAVs. The following shows a four-rotor UAV. With the help of the tools developed in this research, it can achieve wind speeds of up to Complete the figure-8 shuttle operation at 27 mph:
Watch the drone flying in the wind from a different angle:

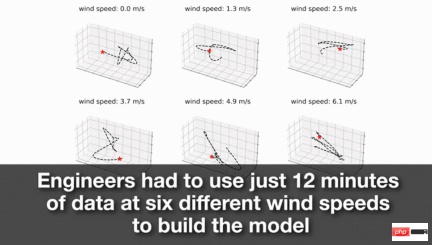
In order for the drone to shuttle under various wind speeds, data is essential. This study does not require much data, and it was obtained in just 12 After minutes of flight data, an autonomous quadcopter drone equipped with Neural-Fly learned how to respond to strong winds. “The amount of data used is very small,” said Michael O’Connell, a graduate student in Caltech’s Department of Aeronautics and Astronautics and one of the paper’s authors.
The research was published Wednesday in the journal Science Robotics.

- Paper address: https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv address: https://arxiv.org/pdf/2205.06908.pdf
In the Neural-Fly experimental training, the drone flies in the wind Flying in the cave, there are six different wind speeds, the fastest being 13.4 mph.
Based on this data, the team created deep neural networks and then allowed their aircraft to skillfully maneuver in the same wind tunnel, e.g. Zoom into the gate in a figure-8 pattern or cruise through two oval gates. The drone traveled faster in testing than it had experienced in training: about 27 miles per hour. This is the maximum wind speed that the wind tunnel can generate, said Guanya Shi, an author on the paper and a graduate student at Caltech. In addition to requiring only a small amount of data, the software only runs on a Raspberry Pi, an inexpensive computing device.
Corresponding author Soon-Jo Chung, professor of aerospace, control and dynamic systems at Caltech, said the error rates they saw compared with existing SOTA technology, equipped with the new The system's drone flight performance is 2.5 to 4 times better.
The picture below from left to right is Shi Guanya, Soon-Jo Chung and Michael O'Connell. It is worth congratulating that Shi Guanya will join the Robotics Institute of the School of Computing at Carnegie Mellon University as an assistant professor in September 2023.
# Researchers said that this technology will be used for drone delivery or flying cars in the future.
Neural-Fly Technology Overview
Unmanned aerial vehicles (UAVs) perform in dynamic high-velocity winds if they are to achieve sustained commercialization Safe and precise flight maneuvers are critical. However, it is challenging to design efficient robot controllers using traditional control design methods because the relationship between different wind conditions and their impact on UAV maneuverability has not been studied in depth.
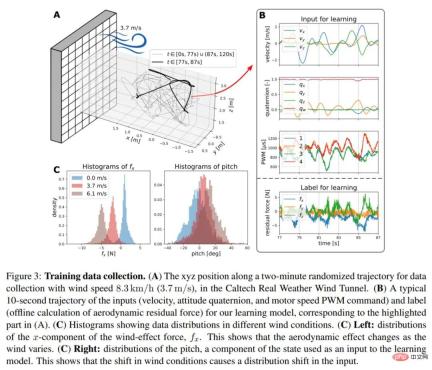
The “Neural-Fly” proposed by researchers at the California Institute of Technology is a data-driven method that serves as a trajectory tracking controller based on deep learning and can learn to quickly adapt to rapidly changing wind conditions. Figure 3(A) below shows the data collection process; 3(B) shows the input and labels of the training data under the wind speed of 13.3km/h (3.7m/s); 3(C) shows the input data and labels under different wind conditions. Distribution of labeled data.
Online adaptive offline meta-learning
Figure 2 below is an overview of the Neural-Fly method, showing It has made progress in adaptive flight control and deep learning-based robot control. Neural-Fly enables centimeter-level position error tracking for flexible and challenging trajectories under dynamic wind conditions for standard UAVs. Specifically, this method mainly consists of two parts, namely offline learning stage and online adaptive control stage for real-time online learning.
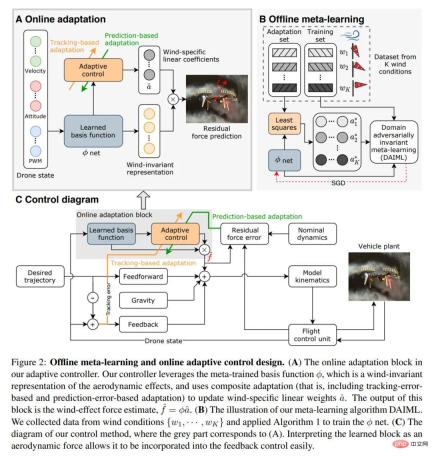
For the offline learning stage, the researchers developed Domain Adversarially Invariant Meta-Learning, DAIML), which learns aerodynamic wind-independent deep neural network (DNN) representations in a data-efficient manner. The representation adapts to different wind conditions by updating a set of linear coefficients output by a hybrid deep neural network.
DAIML is also data efficient, only using a total of 12 minutes of flight data under 6 different wind conditions to train the deep neural network. DAIML contains several key features that not only improve data efficiency but can also be informed by downstream online adaptive control stages.
It is worth noting that DAIML uses spectral normalization to control the Lipschitz property of deep neural networks to improve generalization to unseen data and provide closed-loop stability and Robustness. Additionally, DAIML uses a discriminative network to ensure that the learned representation is wind-invariant and that wind-related information is only included in the linear coefficients adapted to the online control stage.
For the online adaptive control stage, the researchers developed a regularized compound adaptive control law, which is based on how the learned representation interacts with the closed-loop control It is derived from the basic understanding of system interaction and has strict theoretical support.
Specifically, the adaptive law uses a combination of the position tracking error term and the aerodynamic prediction error term to update the linear coefficients related to the wind. This approach effectively guarantees stable and rapid adaptation to any wind conditions and robustness to imperfect learning. Although this adaptive control law can be used with many learned models, the precise representation learned from DAIML helps further improve the speed of adaptation.
Experimental results
In terms of the effect of Neural-Fly, it is 66% better than the nonlinear tracking controller on average, and better than L_1 since The adaptive controller is improved by 42%, which is 35% higher than the incremental nonlinear dynamic inversion (INDI) controller. All of these results were accomplished using standard quadcopter drone hardware while running the PX4's default tuned attitude control.
Even compared to related work that has no external wind interference and uses more complex hardware (such as onboard optical sensors that require 10 times the control frequency and use DC motor speed feedback), Neural- The Fly's tracking performance is also competitive.
Table 1 below shows the error tracking statistics of different methods under different wind conditions.
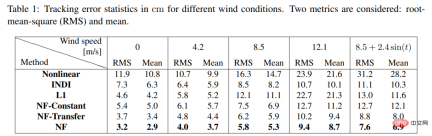
The researchers compared Neural-Fly with two variants, Neural-Fly-Transfer and Neural-Fly-Constant . Among them, NF-Transfer uses representations learned from training on data from different drones, while NF-Constant only uses adaptive control laws with trivial non-learning basis.
Neural-Fly-Transfer demonstrates robustness to UAV configuration changes and model mismatches, and the NF-Constant, L_1, and INDI methods all directly adapt to unknown dynamics without Assuming the underlying physical structure, they have similar performance.
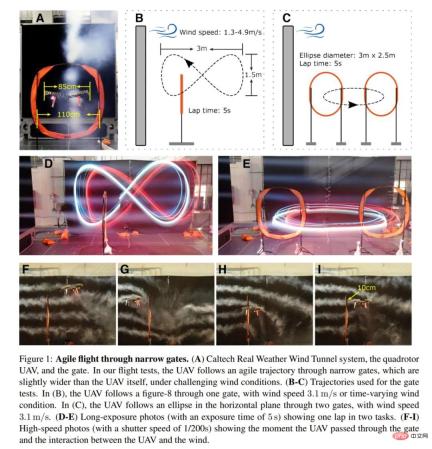
Finally, the researchers proved that Neural-Fly can implement a series of functions, allowing the drone to follow the trajectory and fly through the low-altitude door nimbly under strong wind conditions, as shown in Figure 1 below. .
The above is the detailed content of A drone that can withstand strong winds? Caltech uses 12 minutes of flight data to teach drones to fly in the wind. For more information, please follow other related articles on the PHP Chinese website!

 Gemma Scope: Google's Microscope for Peering into AI's Thought ProcessApr 17, 2025 am 11:55 AM
Gemma Scope: Google's Microscope for Peering into AI's Thought ProcessApr 17, 2025 am 11:55 AMExploring the Inner Workings of Language Models with Gemma Scope Understanding the complexities of AI language models is a significant challenge. Google's release of Gemma Scope, a comprehensive toolkit, offers researchers a powerful way to delve in
 Who Is a Business Intelligence Analyst and How To Become One?Apr 17, 2025 am 11:44 AM
Who Is a Business Intelligence Analyst and How To Become One?Apr 17, 2025 am 11:44 AMUnlocking Business Success: A Guide to Becoming a Business Intelligence Analyst Imagine transforming raw data into actionable insights that drive organizational growth. This is the power of a Business Intelligence (BI) Analyst – a crucial role in gu
 How to Add a Column in SQL? - Analytics VidhyaApr 17, 2025 am 11:43 AM
How to Add a Column in SQL? - Analytics VidhyaApr 17, 2025 am 11:43 AMSQL's ALTER TABLE Statement: Dynamically Adding Columns to Your Database In data management, SQL's adaptability is crucial. Need to adjust your database structure on the fly? The ALTER TABLE statement is your solution. This guide details adding colu
 Business Analyst vs. Data AnalystApr 17, 2025 am 11:38 AM
Business Analyst vs. Data AnalystApr 17, 2025 am 11:38 AMIntroduction Imagine a bustling office where two professionals collaborate on a critical project. The business analyst focuses on the company's objectives, identifying areas for improvement, and ensuring strategic alignment with market trends. Simu
 What are COUNT and COUNTA in Excel? - Analytics VidhyaApr 17, 2025 am 11:34 AM
What are COUNT and COUNTA in Excel? - Analytics VidhyaApr 17, 2025 am 11:34 AMExcel data counting and analysis: detailed explanation of COUNT and COUNTA functions Accurate data counting and analysis are critical in Excel, especially when working with large data sets. Excel provides a variety of functions to achieve this, with the COUNT and COUNTA functions being key tools for counting the number of cells under different conditions. Although both functions are used to count cells, their design targets are targeted at different data types. Let's dig into the specific details of COUNT and COUNTA functions, highlight their unique features and differences, and learn how to apply them in data analysis. Overview of key points Understand COUNT and COU
 Chrome is Here With AI: Experiencing Something New Everyday!!Apr 17, 2025 am 11:29 AM
Chrome is Here With AI: Experiencing Something New Everyday!!Apr 17, 2025 am 11:29 AMGoogle Chrome's AI Revolution: A Personalized and Efficient Browsing Experience Artificial Intelligence (AI) is rapidly transforming our daily lives, and Google Chrome is leading the charge in the web browsing arena. This article explores the exciti
 AI's Human Side: Wellbeing And The Quadruple Bottom LineApr 17, 2025 am 11:28 AM
AI's Human Side: Wellbeing And The Quadruple Bottom LineApr 17, 2025 am 11:28 AMReimagining Impact: The Quadruple Bottom Line For too long, the conversation has been dominated by a narrow view of AI’s impact, primarily focused on the bottom line of profit. However, a more holistic approach recognizes the interconnectedness of bu
 5 Game-Changing Quantum Computing Use Cases You Should Know AboutApr 17, 2025 am 11:24 AM
5 Game-Changing Quantum Computing Use Cases You Should Know AboutApr 17, 2025 am 11:24 AMThings are moving steadily towards that point. The investment pouring into quantum service providers and startups shows that industry understands its significance. And a growing number of real-world use cases are emerging to demonstrate its value out


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Zend Studio 13.0.1
Powerful PHP integrated development environment

SublimeText3 English version
Recommended: Win version, supports code prompts!

Dreamweaver CS6
Visual web development tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

