
 Technology peripheralsAIGraph-DETR3D: Rethinking overlapping regions in multi-view 3D object detection
Technology peripheralsAIGraph-DETR3D: Rethinking overlapping regions in multi-view 3D object detection
arXiv paper "Graph-DETR3D: Rethinking Overlapping Regions for Multi-View 3D Object Detection", June 22, work of the University of Science and Technology of China, Harbin Institute of Technology and SenseTime.
Detecting 3-D objects from multiple image views is a fundamental yet challenging task in visual scene understanding. Due to its low cost and high efficiency, multi-view 3-D object detection shows broad application prospects. However, due to the lack of depth information, it is extremely difficult to accurately detect objects through perspective in 3-D space. Recently, DETR3D introduces a new 3D-2D query paradigm for aggregating multi-view images for 3D object detection and achieves state-of-the-art performance.
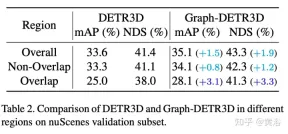
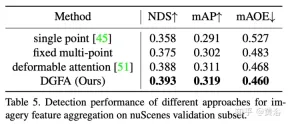
Through intensive guided experiments, this paper quantifies targets located in different areas and finds that "truncated instances" (i.e., the boundary areas of each image) are the main bottleneck hindering DETR3D performance. Despite merging multiple features from two adjacent views in overlapping regions, DETR3D still suffers from insufficient feature aggregation and therefore misses the opportunity to fully improve detection performance.
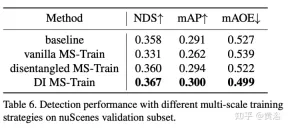
In order to solve this problem, Graph-DETR3D is proposed to automatically aggregate multi-view image information through graph structure learning (GSL). A dynamic 3D map is constructed between each target query and 2-D feature map to enhance target representation, especially in boundary regions. In addition, Graph-DETR3D benefits from a new depth-invariant multi-scale training strategy, which maintains visual depth consistency by simultaneously scaling the image size and target depth.
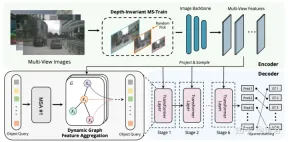
The difference of Graph-DETR3D lies in two points, as shown in the figure: (1) aggregation module of dynamic graph features; (2) depth-invariant multi-scale training strategy. It follows the basic structure of DETR3D and consists of three components: image encoder, transformer decoder and target prediction head. Given a set of images I = {I1, I2,…,IK} (captured by N peri-view cameras), Graph-DETR3D aims to predict the location and category of the bounding box of interest. First, use an image encoder (including ResNet and FPN) to turn these images into a set of relatively L feature map-level features F. Then, a dynamic 3-D graph is constructed to extensively aggregate 2-D information through the dynamic graph feature aggregation (DGFA) module to optimize the representation of the target query. Finally, the enhanced target query is utilized to output the final prediction.
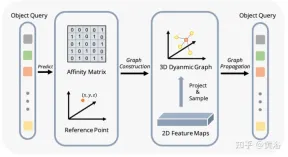
The figure shows the dynamic graph feature aggregation (DFGA) process: first construct a learnable 3-D graph for each target query, and then construct a learnable 3-D graph from the 2-D image plane Sampling characteristics. Finally, the representation of the target query is enhanced through graph connections. This interconnected message propagation scheme supports iterative refinement of graph structure construction and feature enhancement.
Multi-scale training is a commonly used data augmentation strategy in 2D and 3D object detection tasks, which is proven to be effective and low-cost inference. However, it rarely appears in vision-based 3-D inspection methods. Taking into account different input image sizes can improve the robustness of the model, while adjusting the image size and modifying the camera internal parameters to implement a common multi-scale training strategy.
An interesting phenomenon is that the final performance drops sharply. By carefully analyzing the input data, we found that simply rescaling the image leads to a perspective-ambiguity problem: when the target is resized to a larger/smaller scale, its absolute properties (i.e. the size of the target, the distance to the ego point) do not Change.
As a concrete example, the figure shows this ambiguous problem: although the absolute 3D position of the selected area in (a) and (b) is the same, the number of image pixels is different. Depth prediction networks tend to estimate depth based on the occupied area of the image. Therefore, this training pattern in the figure may confuse the depth prediction model and further deteriorate the final performance.

Recalculate depth from pixel perspective for this purpose. The pseudocode of the algorithm is as follows:
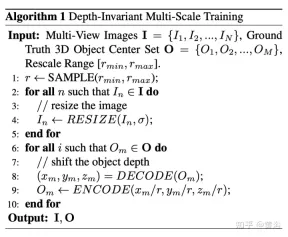
The following is the decoding operation:
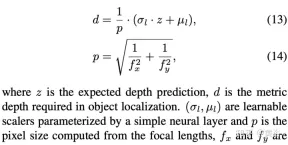
The recalculated pixel size is:

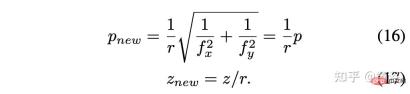
Assume the scale factor r = rx = ry, then simplify to get:
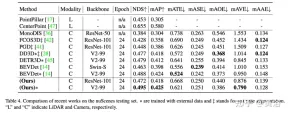
The experimental results are as follows:
The above is the detailed content of Graph-DETR3D: Rethinking overlapping regions in multi-view 3D object detection. For more information, please follow other related articles on the PHP Chinese website!

 SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM
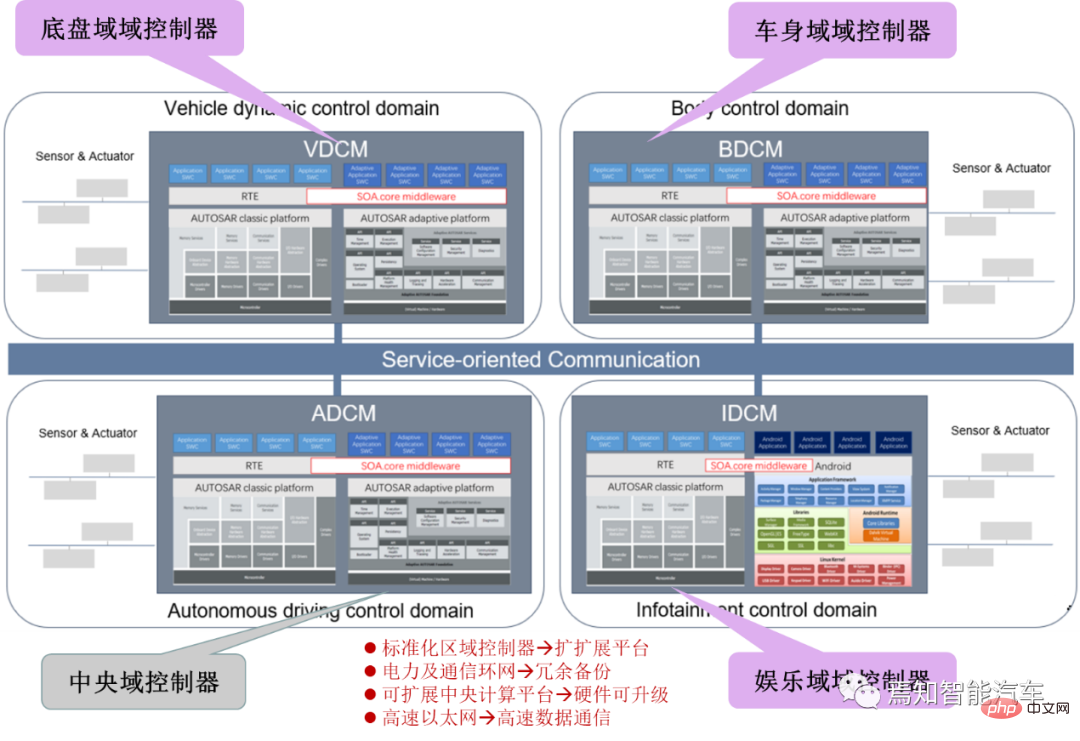
SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM对于下一代集中式电子电器架构而言,采用central+zonal 中央计算单元与区域控制器布局已经成为各主机厂或者tier1玩家的必争选项,关于中央计算单元的架构方式,有三种方式:分离SOC、硬件隔离、软件虚拟化。集中式中央计算单元将整合自动驾驶,智能座舱和车辆控制三大域的核心业务功能,标准化的区域控制器主要有三个职责:电力分配、数据服务、区域网关。因此,中央计算单元将会集成一个高吞吐量的以太网交换机。随着整车集成化的程度越来越高,越来越多ECU的功能将会慢慢的被吸收到区域控制器当中。而平台化
 新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM
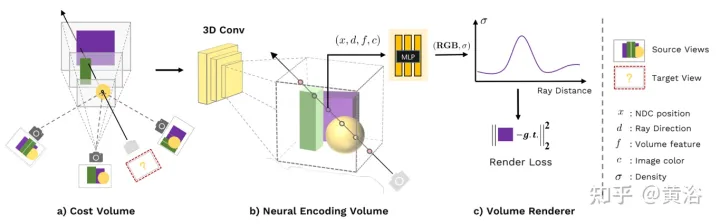
新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM新视角图像生成(NVS)是计算机视觉的一个应用领域,在1998年SuperBowl的比赛,CMU的RI曾展示过给定多摄像头立体视觉(MVS)的NVS,当时这个技术曾转让给美国一家体育电视台,但最终没有商业化;英国BBC广播公司为此做过研发投入,但是没有真正产品化。在基于图像渲染(IBR)领域,NVS应用有一个分支,即基于深度图像的渲染(DBIR)。另外,在2010年曾很火的3D TV,也是需要从单目视频中得到双目立体,但是由于技术的不成熟,最终没有流行起来。当时基于机器学习的方法已经开始研究,比
 多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM
多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM我们经常可以看到蜜蜂、蚂蚁等各种动物忙碌地筑巢。经过自然选择,它们的工作效率高到叹为观止这些动物的分工合作能力已经「传给」了无人机,来自英国帝国理工学院的一项研究向我们展示了未来的方向,就像这样:无人机 3D 打灰:本周三,这一研究成果登上了《自然》封面。论文地址:https://www.nature.com/articles/s41586-022-04988-4为了展示无人机的能力,研究人员使用泡沫和一种特殊的轻质水泥材料,建造了高度从 0.18 米到 2.05 米不等的结构。与预想的原始蓝图
 如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM
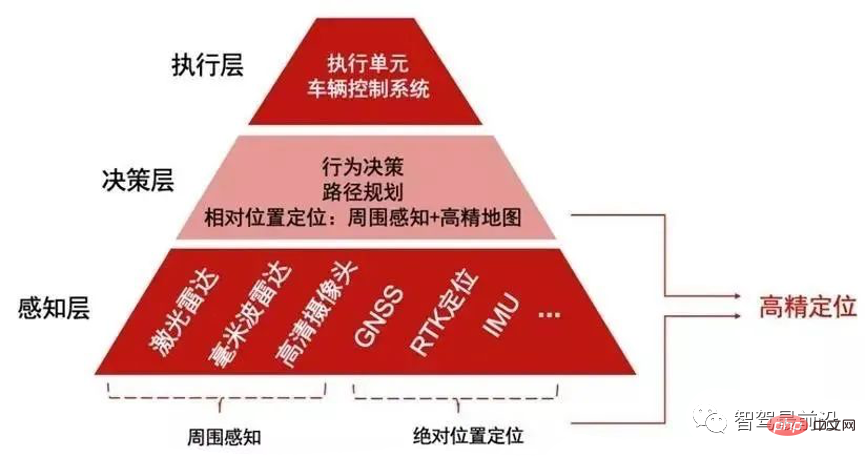
如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM与人类行走一样,自动驾驶汽车想要完成出行过程也需要有独立思考,可以对交通环境进行判断、决策的能力。随着高级辅助驾驶系统技术的提升,驾驶员驾驶汽车的安全性不断提高,驾驶员参与驾驶决策的程度也逐渐降低,自动驾驶离我们越来越近。自动驾驶汽车又称为无人驾驶车,其本质就是高智能机器人,可以仅需要驾驶员辅助或完全不需要驾驶员操作即可完成出行行为的高智能机器人。自动驾驶主要通过感知层、决策层及执行层来实现,作为自动化载具,自动驾驶汽车可以通过加装的雷达(毫米波雷达、激光雷达)、车载摄像头、全球导航卫星系统(G
 超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM
超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM实时全局光照(Real-time GI)一直是计算机图形学的圣杯。多年来,业界也提出多种方法来解决这个问题。常用的方法包通过利用某些假设来约束问题域,比如静态几何,粗糙的场景表示或者追踪粗糙探针,以及在两者之间插值照明。在虚幻引擎中,全局光照和反射系统Lumen这一技术便是由Krzysztof Narkowicz和Daniel Wright一起创立的。目标是构建一个与前人不同的方案,能够实现统一照明,以及类似烘烤一样的照明质量。近期,在SIGGRAPH 2022上,Krzysztof Narko
 一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM
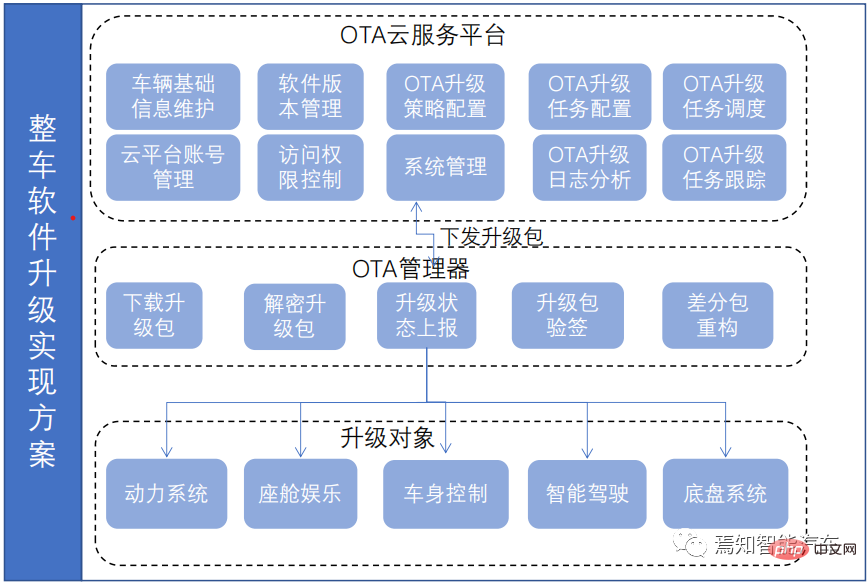
一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM由于智能汽车集中化趋势,导致在网络连接上已经由传统的低带宽Can网络升级转换到高带宽以太网网络为主的升级过程。为了提升车辆升级能力,基于为车主提供持续且优质的体验和服务,需要在现有系统基础(由原始只对车机上传统的 ECU 进行升级,转换到实现以太网增量升级的过程)之上开发一套可兼容现有 OTA 系统的全新 OTA 服务系统,实现对整车软件、固件、服务的 OTA 升级能力,从而最终提升用户的使用体验和服务体验。软件升级触及的两大领域-FOTA/SOTA整车软件升级是通过OTA技术,是对车载娱乐、导
 internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PM
internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PMinternet的基本结构与技术起源于ARPANET。ARPANET是计算机网络技术发展中的一个里程碑,它的研究成果对促进网络技术的发展起到了重要的作用,并未internet的形成奠定了基础。arpanet(阿帕网)为美国国防部高级研究计划署开发的世界上第一个运营的封包交换网络,它是全球互联网的始祖。
 综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PM
综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PMarXiv综述论文“Collaborative Perception for Autonomous Driving: Current Status and Future Trend“,2022年8月23日,上海交大。感知是自主驾驶系统的关键模块之一,然而单车的有限能力造成感知性能提高的瓶颈。为了突破单个感知的限制,提出协同感知,使车辆能够共享信息,感知视线之外和视野以外的环境。本文回顾了很有前途的协同感知技术相关工作,包括基本概念、协同模式以及关键要素和应用。最后,讨论该研究领域的开放挑战和问题


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

Notepad++7.3.1
Easy-to-use and free code editor

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

Dreamweaver CS6
Visual web development tools

ZendStudio 13.5.1 Mac
Powerful PHP integrated development environment

