



MPC control algorithm, the full name is Model Predictive Control (Model Predictive Control), is a control technology based on the system dynamic model. It works by predicting the future behavior of the system through mathematical models and optimizing the system's control inputs based on these predictions to achieve the desired output. The core idea of the MPC control algorithm is to obtain the best control input by optimizing the prediction results for a period of time in the future in each control cycle. This optimization is based on some prediction results to optimize the control input of the system to achieve the desired output. The MPC control algorithm is widely used and is especially suitable for control systems that need to satisfy some constraints. By combining system models and optimization techniques, MPC can be used in different industries. The core of the MPC control algorithm lies in its prediction model, which can predict the future system state based on the current state information of the system. The form of the prediction model is not fixed and can be a state space equation, transfer function, step response model, impulse response model, fuzzy model, etc. The specific form depends on the controlled object and the state that needs to be predicted.
TinyMPC is an open source solver tailored for convex model predictive control, providing high-speed calculations. TinyMPC is implemented in C++ with minimal dependencies and is particularly suitable for embedded control and robotics applications on asset-constrained platforms. TinyMPC can handle state and input boundaries as well as second-order constraints. Python, Julia, and MATLAB interfaces are available to help generate code for embedded systems.
Robot DemonstrationTinyMPC provides support for privacy-enhanced computing applications and can be used to bridge the gap between secure multi-party computation and resource-constrained processing platforms. Integrating TinyMPC into robots with insufficient computing power enables them to perform operations quickly and exhibit the advantages of safe execution.
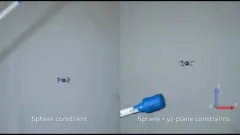
Dynamic Obstacle AvoidanceTinyMPC runs fast enough to relinearize constraints at each time step, allowing it to perform operations on moving obstacles. reasoning. On the left, a virtual sphere centered at the end of the joystick is linearized into a new set of hyperplane constraints at each time step. The algorithm can also handle any number of any meaningful number of arbitrary linear constraints. For example, on the right side, it avoids the end of the stick at the end of the stick while staying in the yz plane.
TinyMPC can initiate recovery under extreme conditions. In this example it is compared to the original controller of Crazyflie 2.1. Only TinyMPC can break through control limits and achieve clean recovery operations.
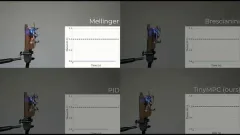
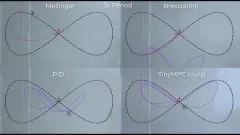
We used the same inventory controller to accomplish the infeasible fast figure-8 tracking task ( The time required to complete a single figure 8 is only possible if the drone is more powerful). TinyMPC and PID are able to stay upright, but TinyMPC's trajectory is closer to a figure-eight shape.
In microcontroller benchmarks, TinyMPC outperforms the best in speed and memory footprint Advanced solver. We solve randomly generated QP-based MPC problems and compare the iteration time and memory footprint with OSQP. TinyMPC's maximum speedup on OSQP is 8x that of OSQP with much less memory.
 #TinyMPC is now also able to handle conic constraints! In (b) we benchmark TinyMPC against two existing cone solvers (SCS and ECOS) with embedded support for the rocket soft landing problem. TinyMPC achieves an average speedup of 13x on SCS and 137x on ECOS.
#TinyMPC is now also able to handle conic constraints! In (b) we benchmark TinyMPC against two existing cone solvers (SCS and ECOS) with embedded support for the rocket soft landing problem. TinyMPC achieves an average speedup of 13x on SCS and 137x on ECOS.
 #Real-time control requires the solver to return a solution within a strict time window. The trajectory tracking performance of TinyMPC was compared with that of SCS and ECOS on the rocket soft landing problem while artificially varying the amount of time available for each solution. TinyMPC has fewer constraint violations and lower tracking errors than SCS and ECOS across all control durations.
#Real-time control requires the solver to return a solution within a strict time window. The trajectory tracking performance of TinyMPC was compared with that of SCS and ECOS on the rocket soft landing problem while artificially varying the amount of time available for each solution. TinyMPC has fewer constraint violations and lower tracking errors than SCS and ECOS across all control durations.
 Algorithm contributor:
Algorithm contributor:

程式碼取得位址:
GitHub - TinyMPC/TinyMPC: Model-predictive control for microcontrollers
The above is the detailed content of A silkier control algorithm than PID & Carnegie Mellon University. For more information, please follow other related articles on the PHP Chinese website!

 从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM
从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM1 前言在发布DALL·E的15个月后,OpenAI在今年春天带了续作DALL·E 2,以其更加惊艳的效果和丰富的可玩性迅速占领了各大AI社区的头条。近年来,随着生成对抗网络(GAN)、变分自编码器(VAE)、扩散模型(Diffusion models)的出现,深度学习已向世人展现其强大的图像生成能力;加上GPT-3、BERT等NLP模型的成功,人类正逐步打破文本和图像的信息界限。在DALL·E 2中,只需输入简单的文本(prompt),它就可以生成多张1024*1024的高清图像。这些图像甚至
 普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM
普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM“Making large models smaller”这是很多语言模型研究人员的学术追求,针对大模型昂贵的环境和训练成本,陈丹琦在智源大会青源学术年会上做了题为“Making large models smaller”的特邀报告。报告中重点提及了基于记忆增强的TRIME算法和基于粗细粒度联合剪枝和逐层蒸馏的CofiPruning算法。前者能够在不改变模型结构的基础上兼顾语言模型困惑度和检索速度方面的优势;而后者可以在保证下游任务准确度的同时实现更快的处理速度,具有更小的模型结构。陈丹琦 普
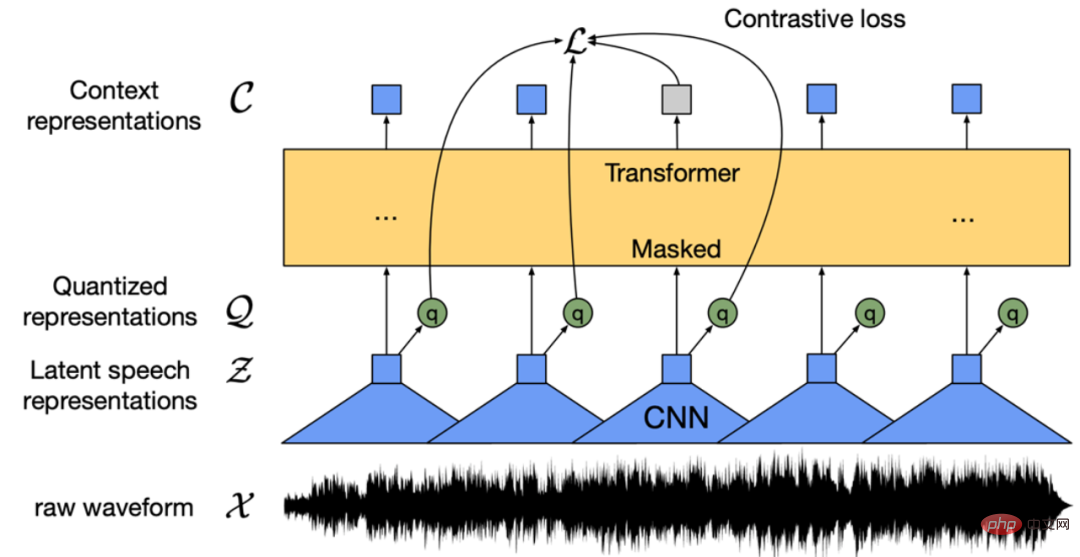 找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PM
找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PMWav2vec 2.0 [1],HuBERT [2] 和 WavLM [3] 等语音预训练模型,通过在多达上万小时的无标注语音数据(如 Libri-light )上的自监督学习,显著提升了自动语音识别(Automatic Speech Recognition, ASR),语音合成(Text-to-speech, TTS)和语音转换(Voice Conversation,VC)等语音下游任务的性能。然而这些模型都没有公开的中文版本,不便于应用在中文语音研究场景。 WenetSpeech [4] 是
 解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM
解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM由于复杂的注意力机制和模型设计,大多数现有的视觉 Transformer(ViT)在现实的工业部署场景中不能像卷积神经网络(CNN)那样高效地执行。这就带来了一个问题:视觉神经网络能否像 CNN 一样快速推断并像 ViT 一样强大?近期一些工作试图设计 CNN-Transformer 混合架构来解决这个问题,但这些工作的整体性能远不能令人满意。基于此,来自字节跳动的研究者提出了一种能在现实工业场景中有效部署的下一代视觉 Transformer——Next-ViT。从延迟 / 准确性权衡的角度看,
 Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM
Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM3月27号,Stability AI的创始人兼首席执行官Emad Mostaque在一条推文中宣布,Stable Diffusion XL 现已可用于公开测试。以下是一些事项:“XL”不是这个新的AI模型的官方名称。一旦发布稳定性AI公司的官方公告,名称将会更改。与先前版本相比,图像质量有所提高与先前版本相比,图像生成速度大大加快。示例图像让我们看看新旧AI模型在结果上的差异。Prompt: Luxury sports car with aerodynamic curves, shot in a
 五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM
五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM人工智能就是一个「拼财力」的行业,如果没有高性能计算设备,别说开发基础模型,就连微调模型都做不到。但如果只靠拼硬件,单靠当前计算性能的发展速度,迟早有一天无法满足日益膨胀的需求,所以还需要配套的软件来协调统筹计算能力,这时候就需要用到「智能计算」技术。最近,来自之江实验室、中国工程院、国防科技大学、浙江大学等多达十二个国内外研究机构共同发表了一篇论文,首次对智能计算领域进行了全面的调研,涵盖了理论基础、智能与计算的技术融合、重要应用、挑战和未来前景。论文链接:https://spj.scien
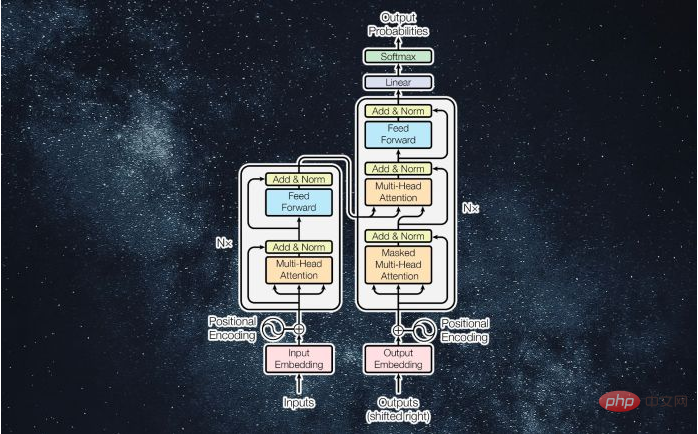 什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM
什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM译者 | 李睿审校 | 孙淑娟近年来, Transformer 机器学习模型已经成为深度学习和深度神经网络技术进步的主要亮点之一。它主要用于自然语言处理中的高级应用。谷歌正在使用它来增强其搜索引擎结果。OpenAI 使用 Transformer 创建了著名的 GPT-2和 GPT-3模型。自从2017年首次亮相以来,Transformer 架构不断发展并扩展到多种不同的变体,从语言任务扩展到其他领域。它们已被用于时间序列预测。它们是 DeepMind 的蛋白质结构预测模型 AlphaFold
 AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM
AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM说起2010年南非世界杯的最大网红,一定非「章鱼保罗」莫属!这只位于德国海洋生物中心的神奇章鱼,不仅成功预测了德国队全部七场比赛的结果,还顺利地选出了最终的总冠军西班牙队。不幸的是,保罗已经永远地离开了我们,但它的「遗产」却在人们预测足球比赛结果的尝试中持续存在。在艾伦图灵研究所(The Alan Turing Institute),随着2022年卡塔尔世界杯的持续进行,三位研究员Nick Barlow、Jack Roberts和Ryan Chan决定用一种AI算法预测今年的冠军归属。预测模型图


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

Dreamweaver Mac version
Visual web development tools

SublimeText3 English version
Recommended: Win version, supports code prompts!

Notepad++7.3.1
Easy-to-use and free code editor

