

 Technology peripheralsAIDenserRadar: 4D millimeter wave radar point cloud detector based on dense LiDAR point cloud
Technology peripheralsAIDenserRadar: 4D millimeter wave radar point cloud detector based on dense LiDAR point cloudDenserRadar: 4D millimeter wave radar point cloud detector based on dense LiDAR point cloud

Original title: DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
Paper link: https://arxiv.org/pdf/2405.05131
Author's unit: Tsinghua University

Thesis idea:
4D millimeter wave (mmWave) radar is used in extreme environments Its robustness, wide detection range, and ability to measure speed and altitude have shown significant potential to enhance perception when autonomous driving systems face corner-cases. However, the inherent sparsity and noise of 4D millimeter-wave radar point clouds limit its further development and practical applications. This paper introduces a novel 4D millimeter-wave radar point cloud detector that exploits high-resolution dense radar point clouds. Our method constructs dense 3D occupied space ground truth from stitched LiDAR point clouds and uses a specially designed network called DenserRadar. The proposed method surpasses existing probability-based and learning-based millimeter-wave radar point cloud detectors in terms of point cloud density and accuracy, achieving better results on the K-Radar dataset.
Main contribution:
The work of this paper is the first 4D millimeter wave radar point cloud detector supervised by dense 3D occupied data space ground truth. Generated by splicing multi-frame LiDAR point clouds, thereby densifying the detected millimeter wave radar point cloud.
This paper proposes an innovative dense snow 3D occupied data space ground truth generation process, and the splicing of dense LiDAR point clouds of the K-Radar dataset. These point clouds provide comprehensive scene ground truth. In the publication will be available for further research.
Due to the special design of the DenserRadar network, the algorithm in this article is superior to existing CFAR type and learning-based millimeter wave radar point cloud detection methods in terms of point cloud density and accuracy.
Network Design:
Autonomous driving technology aims to provide a safe, convenient and comfortable transportation experience, and its development speed is impressive. To achieve high-level autonomous driving, the ability to perceive and position complex environments is indispensable. Therefore, the sensors equipped on autonomous vehicles, including cameras, lidar (LiDAR) and millimeter-wave radar, as well as their related algorithms, are attracting more and more research interest.
Given its advantages such as compact size, high cost-effectiveness, all-weather adaptability, speed measurement capability, and wide detection range [1], millimeter wave (mmWave) radar has been widely used in the field of autonomous driving. Recent advances in multiple-input multiple-output (MIMO) antenna technology have further improved height resolution, enabling the emergence of 4D millimeter-wave radar. Therefore, 4D millimeter-wave radar is increasingly regarded as a key enhancement of perception and positioning capabilities in autonomous driving, especially in challenging edge scenes such as rain, snow, and fog. As its name suggests, 4D millimeter wave radar can measure four dimensions of target information: range, azimuth, altitude and Doppler velocity, providing a comprehensive sensing solution.
However, the quality of 4D millimeter wave radar point clouds lags significantly behind lidar point clouds. First of all, 4D millimeter wave radar point clouds have low resolution problems, especially in angle measurement. This limitation is mainly due to the antenna configuration and direction of arrival (DOA) estimation of mmWave radar [2]. Secondly, 4D millimeter wave radar point clouds are much sparser than lidar point clouds. Third, due to multipath effects, signal interference and ground reflection, 4D millimeter wave radar point clouds often contain a large number of clutter points. All these shortcomings hinder the application of 4D millimeter wave radar in autonomous driving.
The quality of 4D millimeter wave radar point clouds is not only limited by hardware, but also by signal processing algorithms [3]. In particular, detecting real targets from raw radargrams or tensors to generate point clouds can greatly impact quality. Traditionally, the False Alarm Rate (CFAR) detector and its variants [4], [5] are widely used in the detection of millimeter wave radar point clouds. However, as a probability-based algorithm, CFAR-type detectors may encounter problems when detecting objects of different sizes because these objects are not independent and identically distributed [6], which often occurs in autonomous driving scenarios.
In order to solve the point cloud quality issues related to 4D millimeter wave radar, this paper proposes a learning-based 4D millimeter wave radar point cloud detector, which is composed of dense real-life data generated from lidar point clouds. Information supervision. Initially, this paper stitches multiple frames of pre-processed LiDAR point clouds to generate dense 3D occupancy ground truth. This article then introduces the DenserRadar network, which extracts the features of the original 4D millimeter wave radar tensor and generates a denser and more accurate 4D millimeter wave radar point cloud. The network employs a weighted hybrid loss function along with other novel design elements to capture multi-resolution features and generate point clouds with better resolution than traditional techniques. Comparative experiments conducted on the K-Radar data set [7] prove the effectiveness of this method.
The algorithm of this article is shown in Figure 1. First, this paper designs a ground truth generation process to obtain dense 3D occupied space ground truth as supervision information by splicing multi-frame lidar point cloud data, and then establishes the DenserRadar network, which is tasked with generating data from the original 4D millimeter wave Detection of millimeter wave radar point clouds in radar tensor data.

Figure 1. Overview of the entire algorithm.
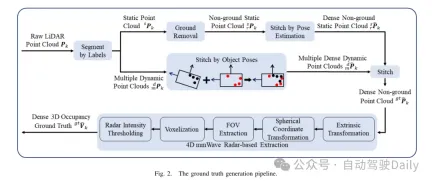
Figure 2. Truth value generation flow chart.
Experimental results:
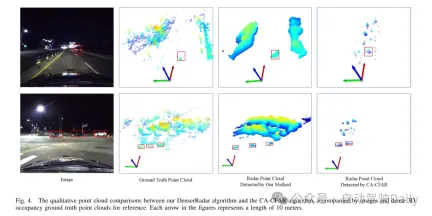
Figure 4. Qualitative point cloud comparison between the DenserRadar algorithm and the CA-CFAR algorithm in this article, attached Images and dense 3D space-occupying ground truth point clouds are used as reference. Each arrow in the diagram represents a length of 10 meters.
Summary:
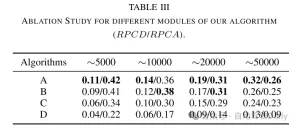
This article introduces DenserRadar, a novel 4D millimeter wave radar point Cloud detection networks, and an innovative process for generating dense ground truth. Experimental results and ablation studies demonstrate the effectiveness of our network architecture and ground truth generation methodology. This research has the potential to improve the perception and localization capabilities of autonomous driving systems, especially in challenging edge-case scenarios.
The above is the detailed content of DenserRadar: 4D millimeter wave radar point cloud detector based on dense LiDAR point cloud. For more information, please follow other related articles on the PHP Chinese website!

![Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]](https://img.php.cn/upload/article/001/242/473/174717025174979.jpg?x-oss-process=image/resize,p_40) Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]May 14, 2025 am 05:04 AM
Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]May 14, 2025 am 05:04 AMChatGPT is not accessible? This article provides a variety of practical solutions! Many users may encounter problems such as inaccessibility or slow response when using ChatGPT on a daily basis. This article will guide you to solve these problems step by step based on different situations. Causes of ChatGPT's inaccessibility and preliminary troubleshooting First, we need to determine whether the problem lies in the OpenAI server side, or the user's own network or device problems. Please follow the steps below to troubleshoot: Step 1: Check the official status of OpenAI Visit the OpenAI Status page (status.openai.com) to see if the ChatGPT service is running normally. If a red or yellow alarm is displayed, it means Open
 Calculating The Risk Of ASI Starts With Human MindsMay 14, 2025 am 05:02 AM
Calculating The Risk Of ASI Starts With Human MindsMay 14, 2025 am 05:02 AMOn 10 May 2025, MIT physicist Max Tegmark told The Guardian that AI labs should emulate Oppenheimer’s Trinity-test calculus before releasing Artificial Super-Intelligence. “My assessment is that the 'Compton constant', the probability that a race to
 An easy-to-understand explanation of how to write and compose lyrics and recommended tools in ChatGPTMay 14, 2025 am 05:01 AM
An easy-to-understand explanation of how to write and compose lyrics and recommended tools in ChatGPTMay 14, 2025 am 05:01 AMAI music creation technology is changing with each passing day. This article will use AI models such as ChatGPT as an example to explain in detail how to use AI to assist music creation, and explain it with actual cases. We will introduce how to create music through SunoAI, AI jukebox on Hugging Face, and Python's Music21 library. Through these technologies, everyone can easily create original music. However, it should be noted that the copyright issue of AI-generated content cannot be ignored, and you must be cautious when using it. Let’s explore the infinite possibilities of AI in the music field together! OpenAI's latest AI agent "OpenAI Deep Research" introduces: [ChatGPT]Ope
 What is ChatGPT-4? A thorough explanation of what you can do, the pricing, and the differences from GPT-3.5!May 14, 2025 am 05:00 AM
What is ChatGPT-4? A thorough explanation of what you can do, the pricing, and the differences from GPT-3.5!May 14, 2025 am 05:00 AMThe emergence of ChatGPT-4 has greatly expanded the possibility of AI applications. Compared with GPT-3.5, ChatGPT-4 has significantly improved. It has powerful context comprehension capabilities and can also recognize and generate images. It is a universal AI assistant. It has shown great potential in many fields such as improving business efficiency and assisting creation. However, at the same time, we must also pay attention to the precautions in its use. This article will explain the characteristics of ChatGPT-4 in detail and introduce effective usage methods for different scenarios. The article contains skills to make full use of the latest AI technologies, please refer to it. OpenAI's latest AI agent, please click the link below for details of "OpenAI Deep Research"
 Explaining how to use the ChatGPT app! Japanese support and voice conversation functionMay 14, 2025 am 04:59 AM
Explaining how to use the ChatGPT app! Japanese support and voice conversation functionMay 14, 2025 am 04:59 AMChatGPT App: Unleash your creativity with the AI assistant! Beginner's Guide The ChatGPT app is an innovative AI assistant that handles a wide range of tasks, including writing, translation, and question answering. It is a tool with endless possibilities that is useful for creative activities and information gathering. In this article, we will explain in an easy-to-understand way for beginners, from how to install the ChatGPT smartphone app, to the features unique to apps such as voice input functions and plugins, as well as the points to keep in mind when using the app. We'll also be taking a closer look at plugin restrictions and device-to-device configuration synchronization
 How do I use the Chinese version of ChatGPT? Explanation of registration procedures and feesMay 14, 2025 am 04:56 AM
How do I use the Chinese version of ChatGPT? Explanation of registration procedures and feesMay 14, 2025 am 04:56 AMChatGPT Chinese version: Unlock new experience of Chinese AI dialogue ChatGPT is popular all over the world, did you know it also offers a Chinese version? This powerful AI tool not only supports daily conversations, but also handles professional content and is compatible with Simplified and Traditional Chinese. Whether it is a user in China or a friend who is learning Chinese, you can benefit from it. This article will introduce in detail how to use ChatGPT Chinese version, including account settings, Chinese prompt word input, filter use, and selection of different packages, and analyze potential risks and response strategies. In addition, we will also compare ChatGPT Chinese version with other Chinese AI tools to help you better understand its advantages and application scenarios. OpenAI's latest AI intelligence
 5 AI Agent Myths You Need To Stop Believing NowMay 14, 2025 am 04:54 AM
5 AI Agent Myths You Need To Stop Believing NowMay 14, 2025 am 04:54 AMThese can be thought of as the next leap forward in the field of generative AI, which gave us ChatGPT and other large-language-model chatbots. Rather than simply answering questions or generating information, they can take action on our behalf, inter
 An easy-to-understand explanation of the illegality of creating and managing multiple accounts using ChatGPTMay 14, 2025 am 04:50 AM
An easy-to-understand explanation of the illegality of creating and managing multiple accounts using ChatGPTMay 14, 2025 am 04:50 AMEfficient multiple account management techniques using ChatGPT | A thorough explanation of how to use business and private life! ChatGPT is used in a variety of situations, but some people may be worried about managing multiple accounts. This article will explain in detail how to create multiple accounts for ChatGPT, what to do when using it, and how to operate it safely and efficiently. We also cover important points such as the difference in business and private use, and complying with OpenAI's terms of use, and provide a guide to help you safely utilize multiple accounts. OpenAI


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

Dreamweaver Mac version
Visual web development tools

EditPlus Chinese cracked version
Small size, syntax highlighting, does not support code prompt function

