
Heim >Technologie-Peripheriegeräte >KI >Wie werden Kameras und Lidar kalibriert? Ein Überblick über alle gängigen Kalibrierungstools der Branche
Wie werden Kameras und Lidar kalibriert? Ein Überblick über alle gängigen Kalibrierungstools der Branche

- PHPznach vorne
- 2024-03-22 14:01:391004Durchsuche
Die Kalibrierung von Kameras und Lidar ist bei vielen Aufgaben eine entscheidende Grundarbeit. Die Genauigkeit der Kalibrierung wirkt sich direkt auf die Obergrenze des Effekts der anschließenden Lösungsfusion aus. Da viele Unternehmen für autonomes Fahren und Robotik viel Arbeitskraft und materielle Ressourcen investieren, um die Genauigkeit der Kalibrierung kontinuierlich zu verbessern, stellen wir Ihnen heute einige gängige Kamera-Lidar-Kalibrierungs-Toolboxen vor und empfehlen Ihnen, diese zu sammeln! 1.Libcbdetect Pixelebene und kombinieren Sie diese Eckpunkte zu einem rechteckigen Schachbrettmuster. Dieser Algorithmus ist in der Lage, verschiedene Arten von Bildern zu verarbeiten (z. B. Lochkameras, Fischaugenkameras, Panoramakameras).
2. Autoware-Kalibrierungspaket
Autoware-Framework-Lidar-Kamera-Kalibrierungs-Toolkit. Link: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_kalibrator
Link: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_kalibrator
3. Zielkalibrierung basierend auf 3D-3D-Matching
Lidar basierend auf 3D-3D-Punktkorrespondenz Kamerakalibrierung , ROS-Paket, aus dem Artikel „LiDAR-Kamerakalibrierung mithilfe von 3D-3D-Punktkorrespondenzen“!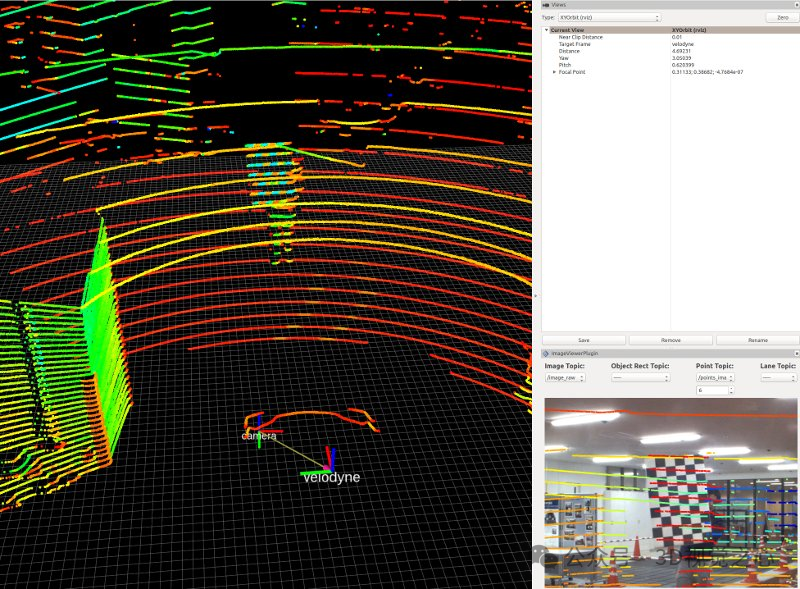 Link: https://github.com/ankitdhall/lidar_camera_kalibration
Link: https://github.com/ankitdhall/lidar_camera_kalibration
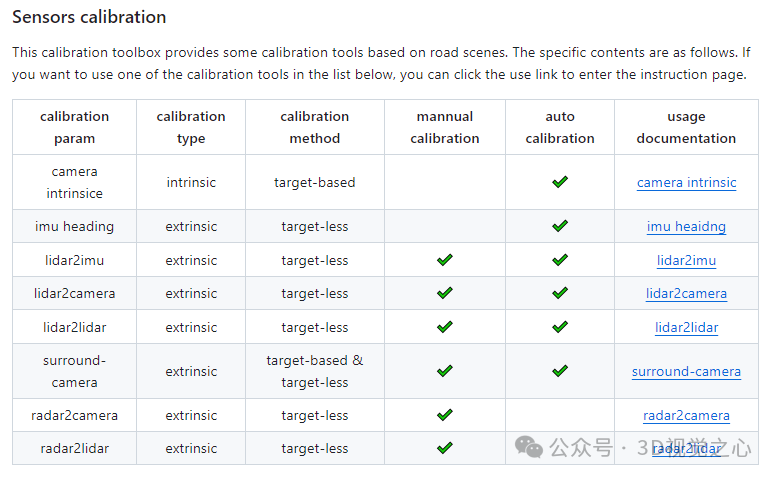
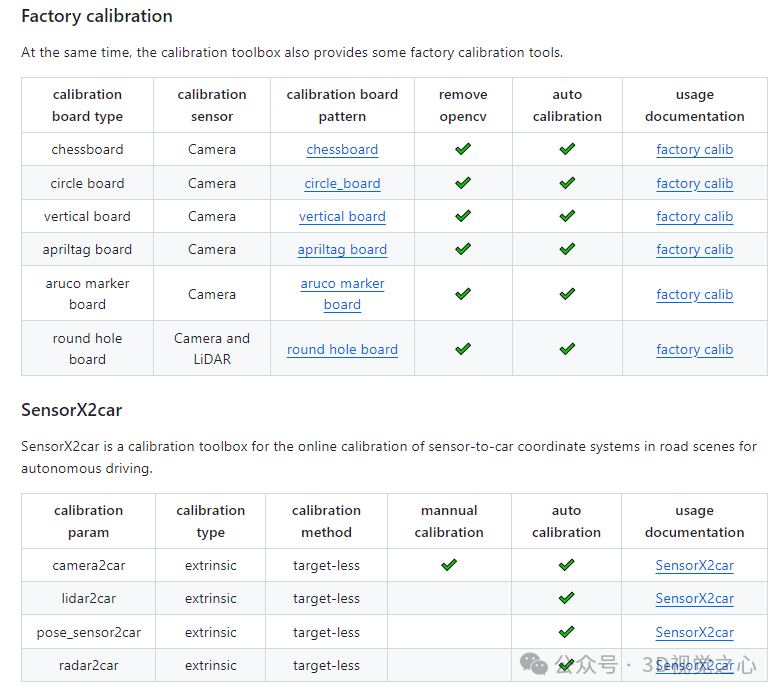
4. Shanghai AI Lab OpenCalib
OpenCalib wird vom Shanghai Artificial Intelligence Laboratory produziert und bietet eine Sensorkalibrierungs-Toolbox. Mit der Toolbox können Sensoren wie IMU, Lidar, Kamera und Radar kalibriert werden.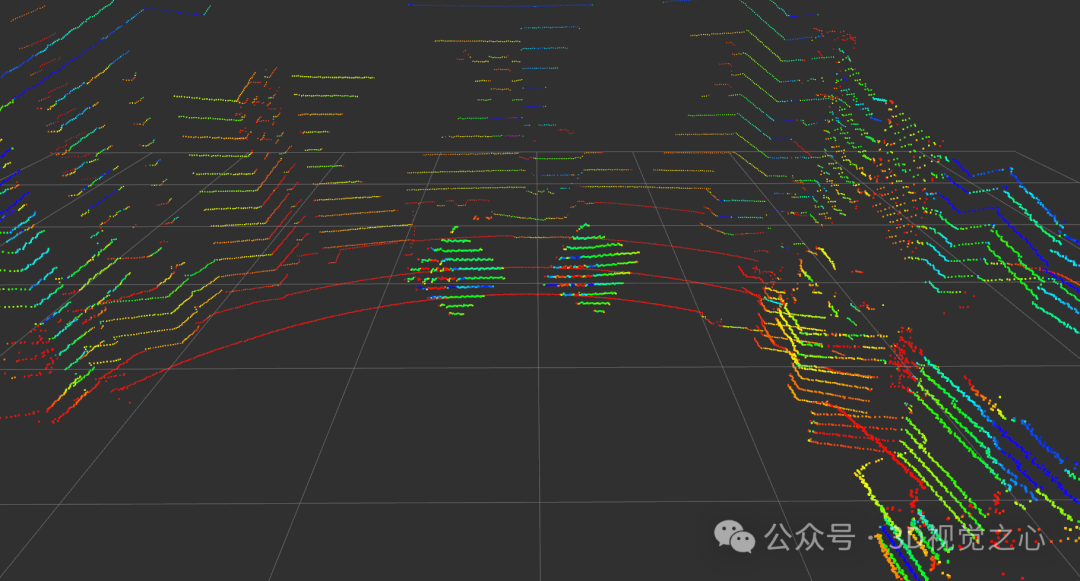 Link: https://github.com/PJLab-ADG/SensorsCalibration
Link: https://github.com/PJLab-ADG/SensorsCalibration
5.Apollo-Kalibrierungstool
Diese Lösung bietet eine Methode zur manuellen Kalibrierung der externen Parameter zwischen Livox-Radar und Kamera. Sie wurde in Mid-40, Horizon und verwendet Televerifiziert am -15. Es umfasst Codes zur Berechnung interner Kameraparameter, zum Erhalten von Kalibrierungsdaten, zur Optimierung der Berechnung externer Parameter und zu Radarkamera-Fusionsanwendungen. Bei dieser Lösung werden die Eckpunkte der Kalibrierungsplatte als Kalibrierungsziel verwendet. Aufgrund der sich nicht wiederholenden Scaneigenschaften des Livox-Radars ist die Dichte der Punktwolke relativ groß, was das Auffinden der genauen Position erleichtert die Eckpunkte in der Radarpunktwolke. Auch die Kalibrierung und Fusion des Kameraradars kann gute Ergebnisse liefern. ??
7.CalibrationToolsCalibrationTools bietet Kalibrierungstools für Lidar-Lidar, Lidar-Kamera und andere Sensorpaare. Darüber hinaus wird Folgendes bereitgestellt: 1) Positionierung – Das Tool zur Bias-Schätzung schätzt die Parameter der für die Koppelnavigation verwendeten Sensoren (IMU und Odometrie) für eine bessere Positionierungsleistung!
2) Visualisierungs- und Analysetools für die Autoware-Steuerungsausgabe;
3) Kalibrierungstools zur Behebung von Fahrzeugbefehlsverzögerungen;
Matlabs eigene Toolbox unterstützt die Kalibrierung von Lidar und Kameras, Link: https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-kalibration.html
9.ROS-Kalibrierung Tool
ROS-Kamera-LIDAR-Kalibrierungspaket, Link: https://github.com/heethesh/lidar_camera_kalibration

10. Direkte visuelle Lidar-Kalibrierung
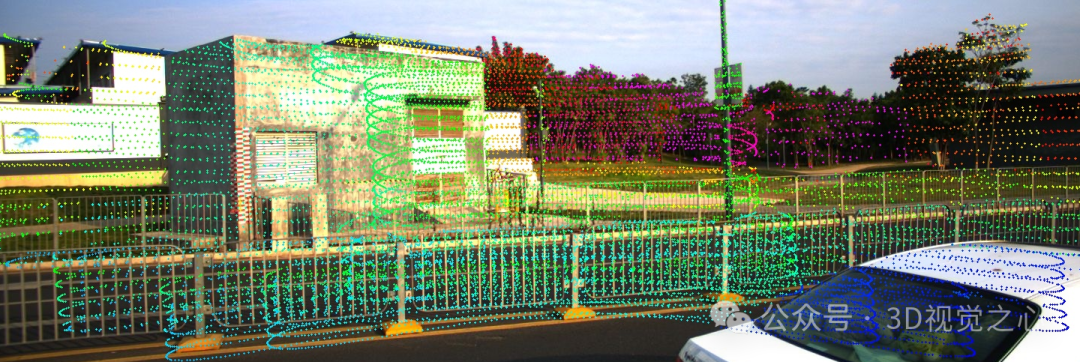
Dieses Paket bietet eine Toolbox für die Lidar-Kamerakalibrierung: Universell: Es kann verschiedene Lidar- und Kameraprojektionsmodelle verarbeiten, einschließlich Rotation und nicht repetitivem Scanning-Lidar Lochkameras, Fischaugenkameras und omnidirektionale Projektionskameras. Ziellos: Es sind keine Kalibrierungsziele erforderlich, sondern es werden Umgebungsstrukturen und Texturen zur Kalibrierung verwendet. Einzelaufnahme: Für die Kalibrierung sind lediglich mindestens ein Paar Lidar-Punktwolken und Kamerabilder erforderlich. Optional können mehrere Lidar-Kameradatenpaare verwendet werden, um die Genauigkeit zu verbessern. Automatisch: Der Kalibrierungsprozess erfolgt automatisch und erfordert kein anfängliches Raten. Genau und robust:Es verwendet einen direkten Lidar-Kamera-Registrierungsalgorithmus auf Pixelebene, der im Vergleich zur kantenbasierten indirekten Lidar-Kamera-Registrierung robuster und genauer ist.
Link: https://github.com/koide3/direct_visual_lidar_kalibration
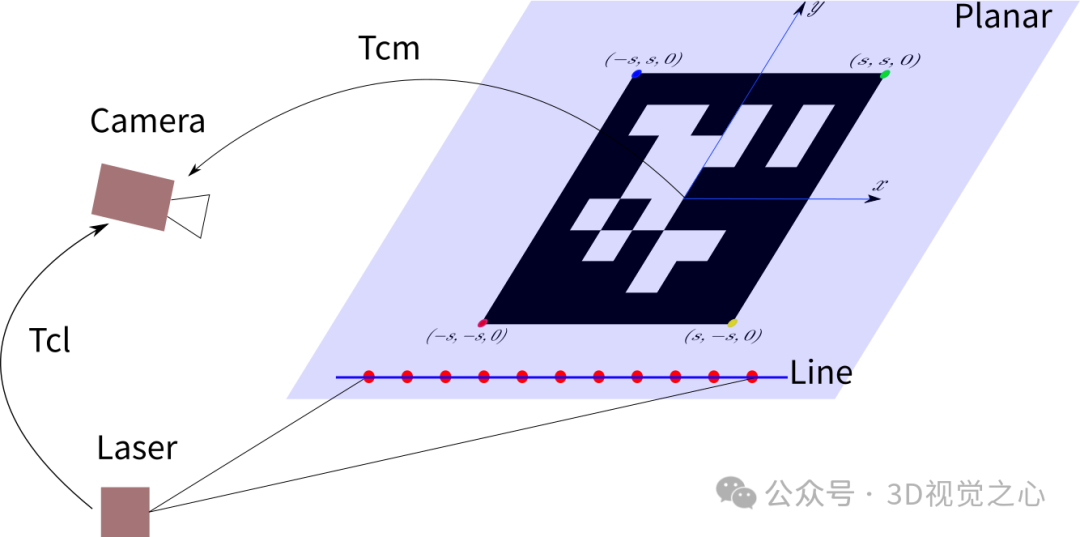
11.2D Lidar-Kamera-Toolbox
Dies ist ein ROS-basierter automatischer Kalibrierungscode für externe Parameter von Einzellinienlasern und Kameras. Das Kalibrierungsprinzip ist in der folgenden Abbildung dargestellt. Die Kamera schätzt die Ebenengleichung der Kalibrierplattenebene im Kamerakoordinatensystem durch den QR-Code. Da die Laserpunktwolke auf die Ebene fällt, wird die Punktwolke in die externen Parameter umgewandelt des Kamerakoordinatensystems durch das Laserkoordinatensystem. Im Kamerakoordinatensystem wird der Abstand vom konstruierten Punkt zur Ebene als Fehler verwendet, der mithilfe nichtlinearer kleinster Quadrate gelöst wird.
Link: https://github.com/MegviiRobot/CamLaserCalibraTool
Das obige ist der detaillierte Inhalt vonWie werden Kameras und Lidar kalibriert? Ein Überblick über alle gängigen Kalibrierungstools der Branche. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- So verwenden Sie das Stiftwerkzeug zum Ausschneiden von Bildern in PS
- Was tun, wenn die Wortsymbolleiste ausgeblendet ist?
- So entfernen Sie die ausgeblendete Excel-Symbolleiste
- So stellen Sie den ursprünglichen Zustand der PS-Symbolleiste wieder her
- Was sind die 6 am häufigsten verwendeten Zeichenwerkzeuge?