
Heim >Technologie-Peripheriegeräte >KI >Haomo Cam4DOcc wurde für CVPR2024 ausgewählt: Es werden ausschließlich Kameras für die 4D-Netzwerkvorhersage verwendet, was dem autonomen Fahren die Möglichkeit gibt, Raum und Zeit vorherzusagen
Haomo Cam4DOcc wurde für CVPR2024 ausgewählt: Es werden ausschließlich Kameras für die 4D-Netzwerkvorhersage verwendet, was dem autonomen Fahren die Möglichkeit gibt, Raum und Zeit vorherzusagen

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2024-03-07 14:19:021149Durchsuche
Am 27. Februar 2024 wurde das vom Team für künstliche Intelligenz von HaoMo Zhixing eingereichte Papier „Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications“ erfolgreich für die internationale Spitzenkonferenz CVPR 2024 ausgewählt.
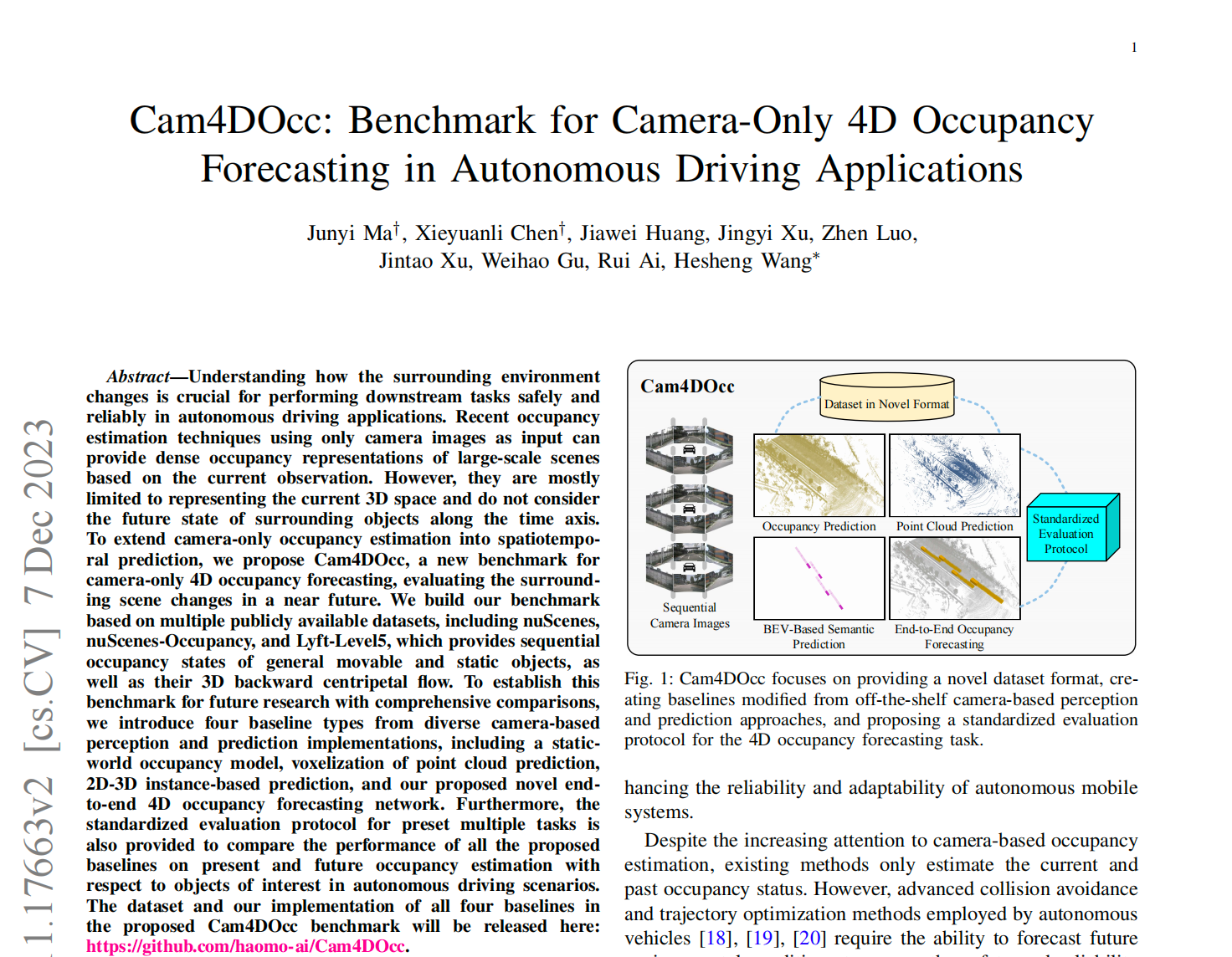
Cam4DOcc ist ein neuer Benchmark von Hao Mo, der Kameras für die 4D-Belegungsrastervorhersage verwendet. Mit dieser Methode können Veränderungen in der umgebenden Szene in naher Zukunft beurteilt werden, wodurch die Schätzung des Kamerabelegungsgitters auf die räumlich-zeitliche Vorhersage ausgeweitet wird. Auf diese Weise wurde die Fähigkeit des autonomen Fahrsystems verbessert, dynamische Veränderungen in der Umgebung wahrzunehmen und vorherzusagen.
Zunächst hat Haomo einen neuen Formatdatensatz erstellt, der auf mehreren öffentlich verfügbaren Datensätzen basiert, und außerdem ein standardisiertes Bewertungsprotokoll und vier Basistypen vorgeschlagen, um eine grundlegende Referenz für den Cam4DOcc-Benchmark bereitzustellen. Zweitens schlug Haimo das erste kamerabasierte 4D-Belegungsvorhersagenetzwerk OCFNet vor, um den zukünftigen Belegungsstatus durchgängig abzuschätzen. Schließlich führte Haomo mehrere Experimente basierend auf dem Cam4DOcc-Benchmark durch, die vier verschiedene Aufgaben umfassten, um die vorgeschlagene Basislinie sowie OCFNet umfassend zu bewerten. Experimentelle Ergebnisse zeigen, dass OCFNet alle Baselines übertrifft und selbst bei begrenzten Trainingsdaten eine angemessene zukünftige Auslastung liefert. Durch den Vergleich von vier verschiedenen Arten von Basislinien zeigt Haomo, dass raumzeitliche End-to-End-Netzwerke möglicherweise die vielversprechendste Forschungsrichtung für die Belegungsvorhersage ausschließlich mit Kameras sind. Darüber hinaus hat sich gezeigt, dass die Verwendung erweiterter GMO-Annotationen und zusätzlicher 3D-Reverse-Radialströmung auch für 4D-Belegungsvorhersagen von Vorteil ist.

Die IEEE Conference on Computer Vision and Pattern Recognition (CVPR) ist eine der drei Top-Konferenzen im Bereich Computer Vision und Mustererkennung. Sie wird von der Newcastle University, University of Technology Sydney, John H. Top, organisiert Schulen und Institutionen wie die Princeton University. CVPR hat sehr strenge Zulassungsstandards. Der Artikel von Hao Mo, der die Cam4DOcc-Methode vorschlägt, wurde erfolgreich für CVPR2024 ausgewählt, was eine Anerkennung der technologischen Forschungsleistungen von Hao Mo darstellt.
Seit seiner Gründung basiert Haimo stets auf technologischer Innovation und hat kontinuierlich viele technologische Patente erhalten, die in der Branche führend sind. Es hat die Führung bei der Festlegung der Entwicklungsrichtung der autonomen Fahrtechnologie mit großen Modellen, großer Rechenleistung usw. übernommen. und Big Data in China. Das von Haimo veröffentlichte branchenweit erste selbstfahrende generative Modell DriveGPT, Xuehu·Hairuo, hat enorme technologische Verbesserungen im Entwicklungsprozess des selbstfahrenden Systems gebracht und die Entwicklung des selbstfahrenden Systems von Haimo in einen völlig neuen Modus gebracht Es hat auch den Entwicklungsprozess der Automobilintelligenz erheblich beschleunigt.
Das obige ist der detaillierte Inhalt vonHaomo Cam4DOcc wurde für CVPR2024 ausgewählt: Es werden ausschließlich Kameras für die 4D-Netzwerkvorhersage verwendet, was dem autonomen Fahren die Möglichkeit gibt, Raum und Zeit vorherzusagen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Tesla plant die Errichtung einer Elektrofahrzeugfabrik in Indien, um die indische Elektrofahrzeugindustrie anzukurbeln
- Um die Entwicklung der Yuanverse-Branche zu unterstützen, wurde dieser Wettbewerb für innovative mobile Kommunikationsanwendungen ins Leben gerufen
- Xiaoyu Yilian trat auf der China International Intelligent Industry Expo auf
- Die Größe der Computerindustrie meines Landes erreicht 2,6 Billionen Yuan, wobei in den letzten sechs Jahren mehr als 20,91 Millionen Allzweckserver und 820.000 KI-Server ausgeliefert wurden.
- Das erste Kollaborative Entwicklungsgipfelforum der Yangtze River Delta Robot Industry Chain 2023 wurde erfolgreich in Wuhu, Anhui, abgehalten