
Heim >Technologie-Peripheriegeräte >KI >ScalableMap: Skalierbares Kartenlernen für die Online-Erstellung von vektorisierten, hochpräzisen Karten mit großer Reichweite
ScalableMap: Skalierbares Kartenlernen für die Online-Erstellung von vektorisierten, hochpräzisen Karten mit großer Reichweite

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-10-31 11:13:061296Durchsuche
Skalierbare Karten: Skalierbares Kartenlernen für die Online-Erstellung vektorisierter HD-Karten über große Entfernungen
Bitte klicken Sie auf den folgenden Link, um das Papier zu lesen: https://arxiv.org/pdf/2310.13378.pdf
Code-Link: https:/ / github.com/jingy1yu/ScalableMap
Der Autor kommt von der Wuhan University
Idee für die Abschlussarbeit:
In diesem Artikel wird ein neuartiger End-to-End-Prozess zur Erstellung von Online-Fernvektoren mithilfe von Fahrzeugkamerasensoren vorgeschlagen. Hoch -Definition-Karten (HD). Vektorisierte Darstellungen hochpräziser Karten verwenden Polylinien und Polygone zur Darstellung von Kartenmerkmalen, die häufig von nachgelagerten Aufgaben verwendet werden. Bisherige Lösungen, die mit Bezug auf die dynamische Zielerkennung entwickelt wurden, ignorierten jedoch die strukturellen Einschränkungen innerhalb linearer Kartenelemente, was zu Leistungseinbußen in Fernszenen führte. In diesem Artikel werden die Attribute von Kartenfunktionen verwendet, um die Leistung der Kartenerstellung zu verbessern. In diesem Artikel werden mithilfe linearer Strukturen genauere Merkmale aus der Vogelperspektive (BEV) extrahiert. Anschließend wird eine hierarchische, spärliche Diagrammdarstellung vorgeschlagen, um die Skalierbarkeit vektorisierter Diagrammelemente weiter zu nutzen, und auf der Grundlage dieser Überwachungsstrategie ein progressiver Dekodierungsmechanismus entworfen . Die Methode ScalableMap dieses Artikels zeigte eine hervorragende Leistung im nuScenes-Datensatz, insbesondere in Langstreckenszenen. Im Vergleich zum vorherigen hochmodernen Modell verbesserte sie sich um 6,5 mAP und erreichte einen FPS von 18,3
Hauptbeiträge:
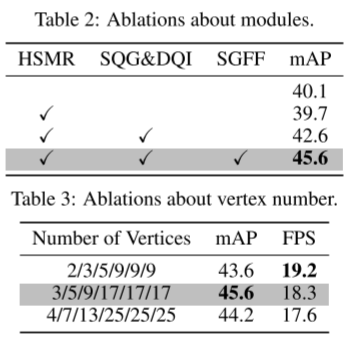
(i) In diesem Artikel wird ScalableMap vorgestellt, die erste End-to-End-Pipeline für die Erstellung von Vektorkarten über große Entfernungen. Dieses Papier nutzt die strukturellen Eigenschaften von Zuordnungselementen, um genauere BEV-Merkmale zu extrahieren, schlägt HSMR basierend auf skalierbaren vektorisierten Elementen vor und entwirft entsprechend progressive Decoder und Überwachungsstrategien. All dies führt zu einer überlegenen Kartenwahrnehmung über große Entfernungen.
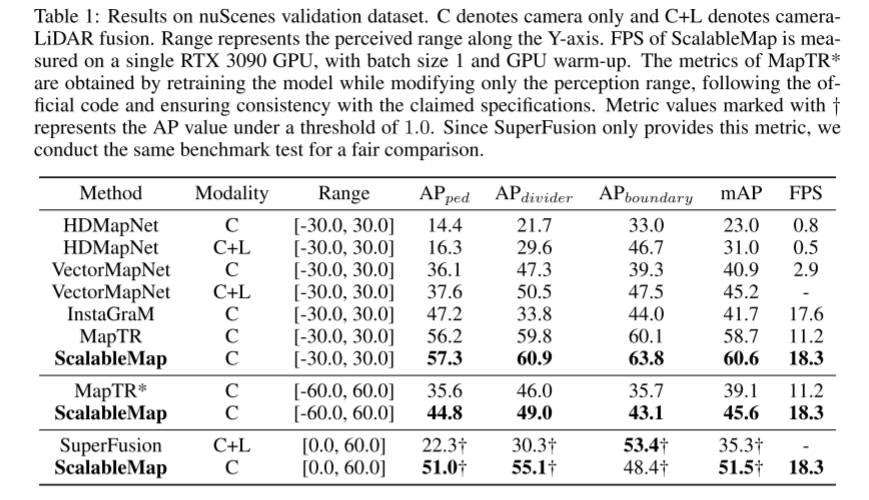
Durch umfangreiche experimentelle Auswertungen testete diese Studie die Leistung von ScalableMap am nuScenes-Datensatz [17]. Die Forschungsmethode erzielte hochmoderne Ergebnisse beim hochpräzisen Kartenlernen über große Entfernungen und verbesserte 6,5 mAP gegenüber bestehenden multimodalen Methoden und erreichte gleichzeitig eine Geschwindigkeit von 18,3 Bildern pro Sekunde
Netzwerkdesign:
Dies Artikel Ziel ist es, die strukturellen Eigenschaften vektorisierter Kartenelemente auszunutzen, um die Herausforderung der genauen Erkennung von Kartenelementen über größere Entfernungen zu lösen. Zunächst extrahiert dieser Artikel positionsbewusste BEV-Merkmale und instanzbewusste BEV-Merkmale über jeweils zwei Zweige und verschmilzt sie unter der Führung einer linearen Struktur, um hybride BEV-Merkmale zu erhalten. Als nächstes schlägt dieser Artikel eine hierarchische Sparse-Map-Darstellung (HSMR) vor, um Kartenelemente auf spärliche, aber genaue Weise zu abstrahieren. Durch die Integration dieser Darstellung mit der von DETR [16] vorgeschlagenen Kaskadendekodierungsschicht wird ein progressiver Decoder entwickelt, der die Einschränkungen strukturierter Informationen durch Nutzung der Skalierbarkeit vektorisierter Abbildungselemente und einer progressiven Überwachungsstrategie zur Verbesserung der Inferenzgenauigkeit erweitert. Die Lösung dieses Artikels, ScalableMap, erhöht dynamisch die Stichprobendichte der Karte, um Inferenzergebnisse in verschiedenen Maßstäben zu erhalten, sodass dieser Artikel schneller genauere Karteninformationen erhalten kann.
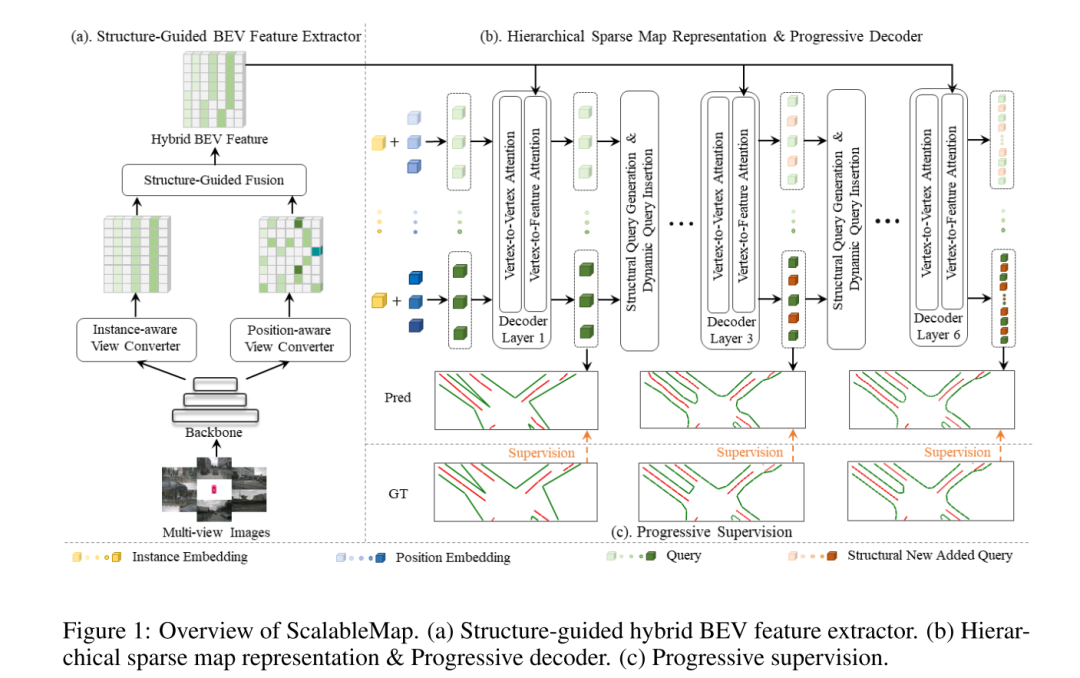
Bitte beachten Sie den neu geschriebenen Inhalt unten: Abbildung 1: ScalableMap-Übersicht. (a) Strukturgesteuerter Hybrid-BEV-Feature-Extraktor. (b) Hierarchische spärliche Kartendarstellung und progressiver Decoder. (c) Progressive Supervision
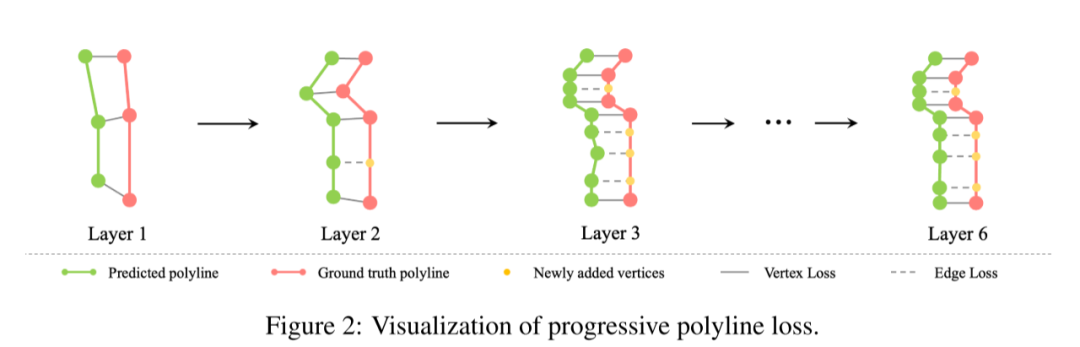
Abbildung 2: Visualisierung des progressiven Polylinienverlusts.
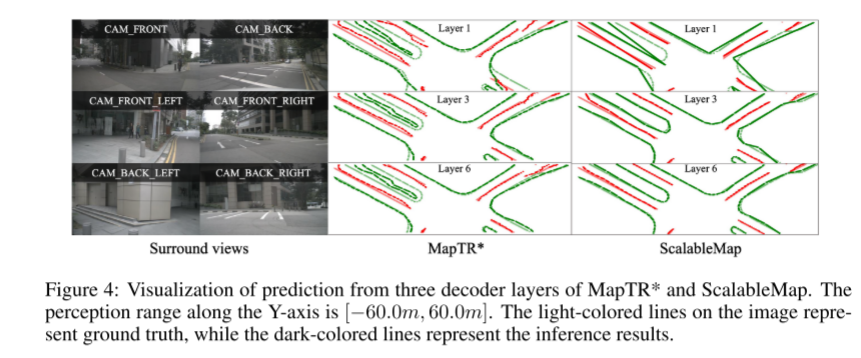
Experimentelle Ergebnisse:

Um den Inhalt neu zu schreiben, ohne die ursprüngliche Bedeutung zu ändern, muss der Originaltext ins Chinesische umgeschrieben werden
Yu, J., Zhang , Z., Xia, S. und Sang, J. (2023). ScalableMap: Skalierbares Kartenlernen für die Online-Erstellung vektorisierter HD-Karten mit großer Reichweite. ArXiv. /abs/2310.13378

Der Inhalt, der umgeschrieben werden muss, ist: Schreiben Sie den Inhalt neu, ohne die ursprüngliche Bedeutung zu ändern. Die Sprache, in die umgeschrieben werden soll, ist Chinesisch. Der Originalsatz muss nicht erscheinen
Das obige ist der detaillierte Inhalt vonScalableMap: Skalierbares Kartenlernen für die Online-Erstellung von vektorisierten, hochpräzisen Karten mit großer Reichweite. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!