


Update: Ein neues Beispiel hinzugefügt, ein selbstfahrendes Lieferfahrzeug, das in den Zementboden von Xinpu fährt
Unter großer Aufmerksamkeit hat GPT4 heute endlich visionäre Funktionen eingeführt. Heute Nachmittag habe ich mit meinen Freunden schnell die Bildwahrnehmungsfähigkeiten von GPT getestet. Obwohl wir Erwartungen hatten, waren wir dennoch sehr schockiert. TL;DR ist Ich denke, die semantischen Probleme beim autonomen Fahren hätten von großen Modellen sehr gut gelöst werden sollen, aber die Glaubwürdigkeit und räumlichen Wahrnehmungsfähigkeiten großer Modelle sind immer noch nicht zufriedenstellend. Es sollte mehr als ausreichen, um einige sogenannte effizienzbezogene Eckfälle zu lösen, aber es ist noch weit entfernt, sich vollständig auf große Modelle zu verlassen, um das Fahren selbstständig abzuschließen und die Sicherheit zu gewährleisten.
1 Beispiel 1: Einige unbekannte Hindernisse tauchten auf der Straße auf wenn chinesische Schriftzeichen vorhanden sind) (Balken), das Wetter und die Umgebung korrekt sind, Ungenaue unbekannte Hindernisse vor Ihnen ohne Aufforderung erkannt
 Ungenaue Teile: Die Position des dritten LKW ist von links nach rechts nicht zu unterscheiden und der Text über dem Kopf des zweiten LKW ist eine Vermutung. Eins (wegen unzureichender Auflösung?)
Ungenaue Teile: Die Position des dritten LKW ist von links nach rechts nicht zu unterscheiden und der Text über dem Kopf des zweiten LKW ist eine Vermutung. Eins (wegen unzureichender Auflösung?)
Das reicht nicht, wir geben weiterhin einen kleinen Hinweis, um zu fragen, was dieses Objekt ist und ob es überdrückt werden kann. 
Beeindruckend! Wir haben mehrere ähnliche Szenarien getestet und die Leistung bei unbekannten Hindernissen kann als sehr erstaunlich bezeichnet werden.
2 Beispiel 2: Verständnis der Ansammlung von Straßenwasser
Es gibt keine Aufforderung, das Schild automatisch zu erkennen, wir geben weiterhin einige Hinweise
Ich war wieder schockiert. . . Er erkannte automatisch den Nebel hinter dem LKW und erwähnte auch die Pfütze, sagte aber noch einmal, die Richtung sei nach links. . . Ich bin der Meinung, dass hier eine schnelle technische Umsetzung erforderlich sein könnte, damit GPT die Position und Richtung besser ausgeben kann.
3 Hier also ein weiterer Rahmen:

5 Beispiel5 Lass uns eine berühmte Szene haben. . . Der Lieferwagen fuhr versehentlich auf die neu gebaute Straße



Ich war zunächst relativ konservativ und habe den Grund nicht direkt erraten. Dies entspricht dem Ziel der Ausrichtung. Nach der Verwendung von CoT wurde festgestellt, dass das Problem darin bestand, dass es sich bei dem Auto nicht um ein selbstfahrendes Fahrzeug handelte, so dass die rechtzeitige Angabe dieser Informationen genauere Informationen liefern kann. Schließlich kann durch eine Reihe von Eingabeaufforderungen der Schluss gezogen werden, dass der neu verlegte Asphalt nicht zum Befahren geeignet ist. Das Endergebnis ist immer noch in Ordnung, aber der Prozess ist umständlicher und erfordert eine schnellere Konstruktion und sorgfältiges Design. Dieser Grund könnte auch darin liegen, dass es sich nicht um ein Bild aus der Ich-Perspektive handelt und nur aus der Perspektive der Dritten Person spekuliert werden kann. Dieses Beispiel ist also nicht sehr präzise.
6 Zusammenfassung
Einige schnelle Versuche haben die Leistungsfähigkeit und Generalisierungsleistung von GPT4V vollständig bewiesen. Bei entsprechenden Eingabeaufforderungen sollte die Stärke von GPT4V voll ausgenutzt werden können. Die Lösung des semantischen Eckfalls sollte sehr vielversprechend sein, aber das Problem der Illusion wird einige Anwendungen in sicherheitsrelevanten Szenarien immer noch plagen. Ich persönlich finde es sehr spannend, dass der rationelle Einsatz solch großer Modelle die Entwicklung des autonomen L4- und sogar L5-Fahrens erheblich beschleunigen kann. Insbesondere das durchgehende Fahren bleibt ein umstrittenes Thema. Ich habe in letzter Zeit viel nachgedacht, deshalb werde ich Zeit finden, einen Artikel zu schreiben, um mit euch allen zu plaudern~

Originallink: https://mp.weixin.qq.com/s/RtEek6HadErxXLSdtsMWHQ
Das obige ist der detaillierte Inhalt vonSpannend! Eine vorläufige Studie zu GPT-4V beim autonomen Fahren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

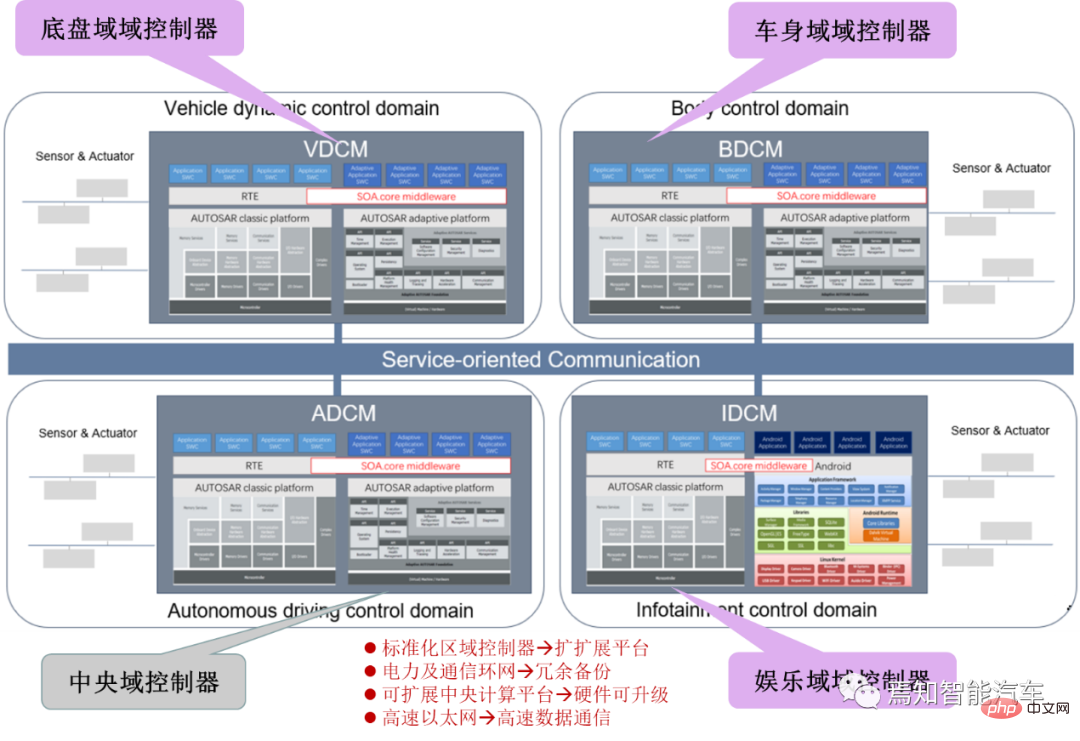 SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM
SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM对于下一代集中式电子电器架构而言,采用central+zonal 中央计算单元与区域控制器布局已经成为各主机厂或者tier1玩家的必争选项,关于中央计算单元的架构方式,有三种方式:分离SOC、硬件隔离、软件虚拟化。集中式中央计算单元将整合自动驾驶,智能座舱和车辆控制三大域的核心业务功能,标准化的区域控制器主要有三个职责:电力分配、数据服务、区域网关。因此,中央计算单元将会集成一个高吞吐量的以太网交换机。随着整车集成化的程度越来越高,越来越多ECU的功能将会慢慢的被吸收到区域控制器当中。而平台化
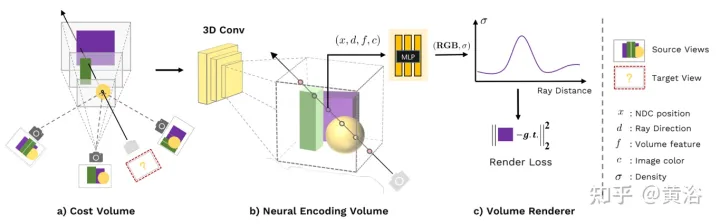 新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM
新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM新视角图像生成(NVS)是计算机视觉的一个应用领域,在1998年SuperBowl的比赛,CMU的RI曾展示过给定多摄像头立体视觉(MVS)的NVS,当时这个技术曾转让给美国一家体育电视台,但最终没有商业化;英国BBC广播公司为此做过研发投入,但是没有真正产品化。在基于图像渲染(IBR)领域,NVS应用有一个分支,即基于深度图像的渲染(DBIR)。另外,在2010年曾很火的3D TV,也是需要从单目视频中得到双目立体,但是由于技术的不成熟,最终没有流行起来。当时基于机器学习的方法已经开始研究,比
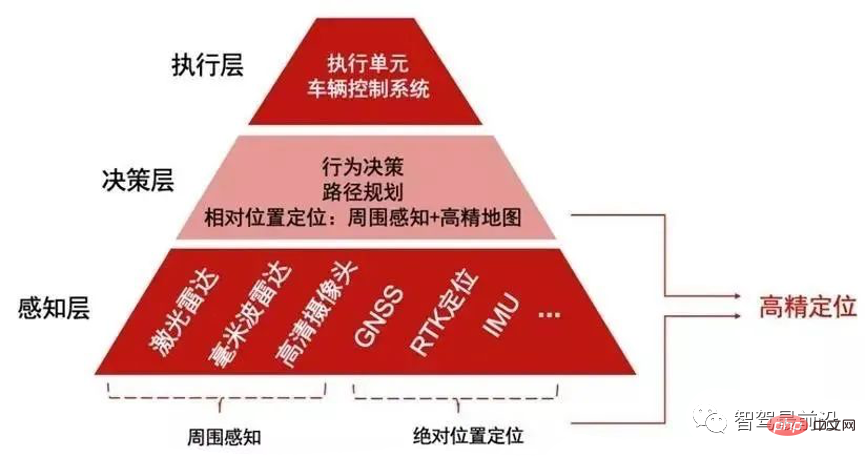 如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM
如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM与人类行走一样,自动驾驶汽车想要完成出行过程也需要有独立思考,可以对交通环境进行判断、决策的能力。随着高级辅助驾驶系统技术的提升,驾驶员驾驶汽车的安全性不断提高,驾驶员参与驾驶决策的程度也逐渐降低,自动驾驶离我们越来越近。自动驾驶汽车又称为无人驾驶车,其本质就是高智能机器人,可以仅需要驾驶员辅助或完全不需要驾驶员操作即可完成出行行为的高智能机器人。自动驾驶主要通过感知层、决策层及执行层来实现,作为自动化载具,自动驾驶汽车可以通过加装的雷达(毫米波雷达、激光雷达)、车载摄像头、全球导航卫星系统(G
 多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM
多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM我们经常可以看到蜜蜂、蚂蚁等各种动物忙碌地筑巢。经过自然选择,它们的工作效率高到叹为观止这些动物的分工合作能力已经「传给」了无人机,来自英国帝国理工学院的一项研究向我们展示了未来的方向,就像这样:无人机 3D 打灰:本周三,这一研究成果登上了《自然》封面。论文地址:https://www.nature.com/articles/s41586-022-04988-4为了展示无人机的能力,研究人员使用泡沫和一种特殊的轻质水泥材料,建造了高度从 0.18 米到 2.05 米不等的结构。与预想的原始蓝图
 超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM
超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM实时全局光照(Real-time GI)一直是计算机图形学的圣杯。多年来,业界也提出多种方法来解决这个问题。常用的方法包通过利用某些假设来约束问题域,比如静态几何,粗糙的场景表示或者追踪粗糙探针,以及在两者之间插值照明。在虚幻引擎中,全局光照和反射系统Lumen这一技术便是由Krzysztof Narkowicz和Daniel Wright一起创立的。目标是构建一个与前人不同的方案,能够实现统一照明,以及类似烘烤一样的照明质量。近期,在SIGGRAPH 2022上,Krzysztof Narko
 internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PM
internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PMinternet的基本结构与技术起源于ARPANET。ARPANET是计算机网络技术发展中的一个里程碑,它的研究成果对促进网络技术的发展起到了重要的作用,并未internet的形成奠定了基础。arpanet(阿帕网)为美国国防部高级研究计划署开发的世界上第一个运营的封包交换网络,它是全球互联网的始祖。
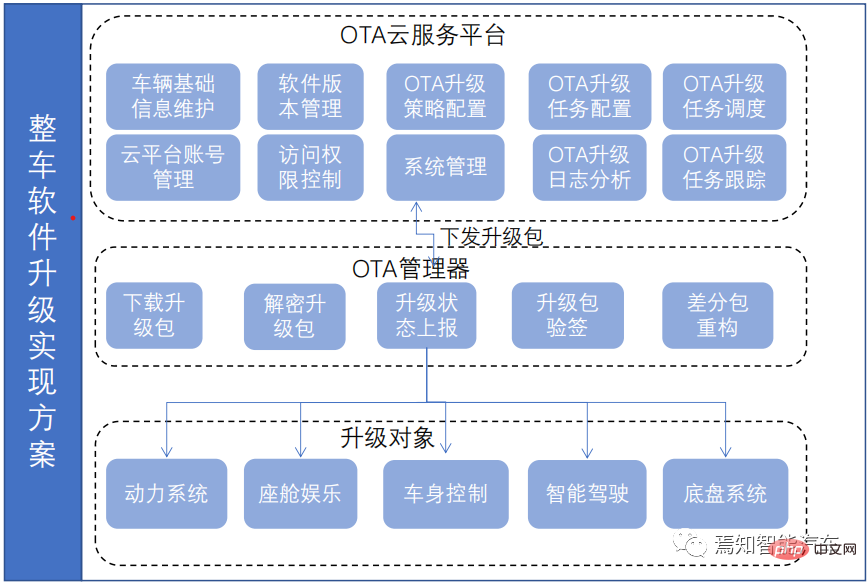 一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM
一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM由于智能汽车集中化趋势,导致在网络连接上已经由传统的低带宽Can网络升级转换到高带宽以太网网络为主的升级过程。为了提升车辆升级能力,基于为车主提供持续且优质的体验和服务,需要在现有系统基础(由原始只对车机上传统的 ECU 进行升级,转换到实现以太网增量升级的过程)之上开发一套可兼容现有 OTA 系统的全新 OTA 服务系统,实现对整车软件、固件、服务的 OTA 升级能力,从而最终提升用户的使用体验和服务体验。软件升级触及的两大领域-FOTA/SOTA整车软件升级是通过OTA技术,是对车载娱乐、导
 综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PM
综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PMarXiv综述论文“Collaborative Perception for Autonomous Driving: Current Status and Future Trend“,2022年8月23日,上海交大。感知是自主驾驶系统的关键模块之一,然而单车的有限能力造成感知性能提高的瓶颈。为了突破单个感知的限制,提出协同感知,使车辆能够共享信息,感知视线之外和视野以外的环境。本文回顾了很有前途的协同感知技术相关工作,包括基本概念、协同模式以及关键要素和应用。最后,讨论该研究领域的开放挑战和问题


Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

VSCode Windows 64-Bit-Download
Ein kostenloser und leistungsstarker IDE-Editor von Microsoft

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)

MantisBT
Mantis ist ein einfach zu implementierendes webbasiertes Tool zur Fehlerverfolgung, das die Fehlerverfolgung von Produkten unterstützen soll. Es erfordert PHP, MySQL und einen Webserver. Schauen Sie sich unsere Demo- und Hosting-Services an.

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SAP NetWeaver Server-Adapter für Eclipse
Integrieren Sie Eclipse mit dem SAP NetWeaver-Anwendungsserver.

