
Heim >Technologie-Peripheriegeräte >KI >Was ist NeRF? Ist die NeRF-basierte 3D-Rekonstruktion voxelbasiert?
Was ist NeRF? Ist die NeRF-basierte 3D-Rekonstruktion voxelbasiert?

- PHPznach vorne
- 2023-10-16 11:33:092193Durchsuche
1 Einführung
Neuronale Strahlungsfelder (NeRF) sind ein ziemlich neues Paradigma im Bereich Deep Learning und Computer Vision. Die Technik wurde im ECCV 2020-Papier „NeRF: Representing Scenes as Neural Radiation Fields for View Synthesis“ (das mit dem Best Paper Award ausgezeichnet wurde) vorgestellt und erfreut sich seitdem mit bis heute fast 800 Zitaten einer explosionsartigen Beliebtheit [1]. Der Ansatz markiert einen grundlegenden Wandel in der traditionellen Art und Weise, wie maschinelles Lernen 3D-Daten verarbeitet.
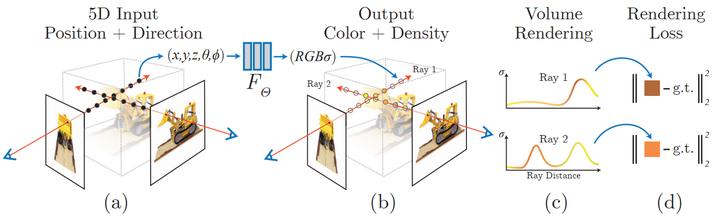
Neuronale Strahlungsfeld-Szenendarstellung und differenzierbarer Rendering-Prozess:
Synthesieren Sie das Bild durch Abtasten von 5D-Koordinaten (Position und Blickrichtung) entlang des Kamerastrahls; geben Sie diese Positionen in ein MLP ein, um Farb- und Volumendichte zu erzeugen; Volumen-Rendering-Techniken synthetisieren diese Werte zu einem Bild; die Rendering-Funktion ist differenzierbar und optimiert daher die Szenendarstellung, indem sie den Restunterschied zwischen dem synthetisierten Bild und dem real beobachteten Bild minimiert.
2 Was ist ein NeRF?
NeRF ist ein generatives Modell, das anhand eines Bildes neue Ansichten einer 3D-Szene generiert, abhängig von einem Bild und einer präzisen Pose, ein Prozess, der oft als „Synthese neuer Ansichten“ bezeichnet wird. Darüber hinaus definiert es auch klar die 3D-Form und das Erscheinungsbild der Szene als kontinuierliche Funktion, die durch marschierende Würfel 3D-Netze erzeugen kann. Obwohl sie direkt aus Bilddaten lernen, verwenden sie weder Faltungs- noch Transformatorschichten.
Im Laufe der Jahre gab es viele Möglichkeiten, 3D-Daten in Anwendungen des maschinellen Lernens darzustellen, von 3D-Voxeln über Punktwolken bis hin zu vorzeichenbehafteten Distanzfunktionen. Ihr größter gemeinsamer Nachteil ist die Notwendigkeit, im Voraus ein 3D-Modell anzunehmen, entweder mithilfe von Werkzeugen wie Photogrammetrie oder Lidar, um 3D-Daten zu generieren, oder das 3D-Modell manuell zu erstellen. Viele Arten von Objekten, beispielsweise stark reflektierende Objekte, „gitterartige“ Objekte oder transparente Objekte, können jedoch nicht im Maßstab gescannt werden. 3D-Rekonstruktionsmethoden weisen außerdem häufig Rekonstruktionsfehler auf, die zu Stufeneffekten oder Drift führen können, die die Modellgenauigkeit beeinträchtigen.
Im Gegensatz dazu basiert NeRF auf dem Konzept der Strahlenlichtfelder. Ein Lichtfeld ist eine Funktion, die beschreibt, wie die Lichtübertragung in einem 3D-Volumen erfolgt. Es beschreibt die Richtung, in der sich ein Lichtstrahl an jeder x = (x, y, z)-Koordinate im Raum und in jeder Richtung d bewegt, beschrieben als θ- und ξ-Winkel oder Einheitsvektoren. Zusammen bilden sie einen 5D-Merkmalsraum, der die Lichtdurchlässigkeit in einer 3D-Szene beschreibt. Inspiriert von dieser Darstellung versucht NeRF, eine Funktion zu approximieren, die von diesem Raum auf einen 4D-Raum abbildet, der aus Farbe c = (R, G, B) und Dichte (Dichte) σ besteht, den man sich als diesen 5D-Koordinatenraum The vorstellen kann Möglichkeit, dass der Strahl beendet wird (z. B. durch Okklusion). Daher ist Standard-NeRF eine Funktion der Form F: (x, d) -> (c, σ).
Das ursprüngliche NeRF-Papier parametrisierte diese Funktion mithilfe eines mehrschichtigen Perzeptrons, das auf einer Reihe von Bildern mit bekannten Posen trainiert wurde. Dies ist eine Methode in einer Klasse von Techniken, die als generalisierte Szenenrekonstruktion bezeichnet werden und darauf abzielen, 3D-Szenen direkt aus einer Sammlung von Bildern zu beschreiben. Dieser Ansatz hat einige sehr schöne Eigenschaften:
- Lernen Sie direkt aus den Daten.
- Die kontinuierliche Darstellung der Szene ermöglicht sehr dünne und komplexe Strukturen wie Blätter oder Netze.
- Implizite physikalische Eigenschaften wie Spiegelung und Rauheit.
- Implizite Darstellung der Beleuchtung in der Szene
Seitdem ist eine Reihe von Verbesserungspapieren entstanden, wie z. B. Wenig-Shot- und Single-Shot-Lernen [2, 3], Unterstützung für dynamische Szenen [4, 5] und die Integration der Lichtfeldverallgemeinerung in Funktionen Felder [6], Lernen aus unkalibrierten Bildsammlungen im Web [7], Einbeziehung von LIDAR-Daten [8], großflächige Szenendarstellung [9], Lernen ohne neuronale Netze [10] und so weiter. 3 NeRF-Architektur Szene, um eine Reihe von Proben an der (x, d)-Position zu sammeln
Verwenden Sie den Punkt und die Blickrichtung (x, d) jeder Probe als Eingabe, um den Ausgabewert (c, σ) (rgbσ) zu erzeugen
Verwenden Sie klassisch Volumen-Rendering-Technologie zum Erstellen von Bildern
- Die Funktion „Lichtfeld“ (viele Dokumente übersetzen es als „Strahlungsfeld“, aber der Übersetzer glaubt, dass „Lichtfeld“ intuitiver ist) ist nur eine von mehreren Komponenten, die Sie erstellen können die visuellen Effekte, die Sie zuvor im Video gesehen haben. Insgesamt enthält dieser Artikel die folgenden Teile:
- Positionskodierung
- Light Field Function Approximator (MLP)
Differenzierbarer Volumenrenderer (Differenzierbarer Volumenrenderer)
- Stratified Sampling Hierarchical Volume Sampling
- Um die Klarheit zu maximieren Neben der Beschreibung zeigt dieser Artikel die Schlüsselelemente jeder Komponente in einem möglichst prägnanten Code an. Es wird auf die ursprüngliche Implementierung von bmild und die PyTorch-Implementierung von yenchenlin und krrish94 verwiesen.
3.1 Positionsgeber
Genau wie das 2017 eingeführte Transformatormodell [11] profitiert auch NeRF von einem Positionsgeber als Eingang. Es verwendet Hochfrequenzfunktionen, um seine kontinuierlichen Eingaben in einen höherdimensionalen Raum abzubilden, damit das Modell hochfrequente Änderungen in den Daten lernen kann, was zu einem saubereren Modell führt. Diese Methode umgeht die Voreingenommenheit des neuronalen Netzwerks auf niederfrequente Funktionen und ermöglicht es NeRF, klarere Details darzustellen. Der Autor verweist auf einen Artikel zu ICML 2019 [12].
Wenn Sie mit der Positionscodierung von Transformerd vertraut sind, ist die zugehörige Implementierung von NeRF ziemlich standardmäßig und weist die gleichen abwechselnden Sinus- und Cosinus-Ausdrücke auf. Implementierung des Positionsencoders:
# pyclass PositionalEncoder(nn.Module):# sine-cosine positional encoder for input points.def __init__( self,d_input: int,n_freqs: int,log_space: bool = False ):super().__init__()self.d_input = d_inputself.n_freqs = n_freqs # 是不是视线上的采样频率?self.log_space = log_spaceself.d_output = d_input * (1 + 2 * self.n_freqs)self.embed_fns = [lambda x: x] # 冒号前面的x表示函数参数,后面的表示匿名函数运算# Define frequencies in either linear or log scaleif self.log_space:freq_bands = 2.**torch.linspace(0., self.n_freqs - 1, self.n_freqs)else:freq_bands = torch.linspace(2.**0., 2.**(self.n_freqs - 1), self.n_freqs)# Alternate sin and cosfor freq in freq_bands:self.embed_fns.append(lambda x, freq=freq: torch.sin(x * freq))self.embed_fns.append(lambda x, freq=freq: torch.cos(x * freq))def forward(self, x) -> torch.Tensor:# Apply positional encoding to input.return torch.concat([fn(x) for fn in self.embed_fns], dim=-1)
Denken: Diese Positionskodierung kodiert Eingabepunkte. Ist dieser Eingabepunkt ein Abtastpunkt auf der Sichtlinie? Oder ein anderer Blickwinkel? Ist self.n_freqs die Abtastfrequenz auf der Sichtlinie? Nach diesem Verständnis sollte es sich um die Abtastposition auf der Sichtlinie handeln, denn wenn die Abtastposition auf der Sichtlinie nicht codiert ist, können diese Positionen nicht effektiv dargestellt werden und ihr RGBA kann nicht trainiert werden.
3.2 Strahlungsfeldfunktion
Im Originaltext wird die Lichtfeldfunktion durch das NeRF-Modell dargestellt. Das NeRF-Modell ist ein typisches mehrschichtiges Perzeptron, das codierte 3D-Punkte und Blickrichtung als Eingabe verwendet und RGBA-Werte zurückgibt als Ausgabe. Obwohl in diesem Artikel neuronale Netze verwendet werden, kann hier jeder Funktionsnäherungsmechanismus verwendet werden. Beispielsweise nutzt die Folgearbeit Plenoxels von Yu et al. sphärische Harmonische, um ein um Größenordnungen schnelleres Training zu erreichen und gleichzeitig wettbewerbsfähige Ergebnisse zu erzielen [10].
 Bilder
Bilder
Das NeRF-Modell ist 8 Schichten tief und die meisten Schichten haben Merkmalsabmessungen von 256. Die restlichen Verbindungen werden auf Layer 4 platziert. Nach diesen Schichten werden RGB- und σ-Werte generiert. Die RGB-Werte werden mit einer linearen Schicht weiterverarbeitet, dann mit der Blickrichtung verkettet, dann durch eine weitere lineare Schicht geleitet und schließlich am Ausgang wieder mit σ kombiniert. PyTorch-Modulimplementierung des NeRF-Modells:
class NeRF(nn.Module):# Neural radiance fields module.def __init__( self,d_input: int = 3,n_layers: int = 8,d_filter: int = 256,skip: Tuple[int] = (4,), # (4,)只有一个元素4的元组 d_viewdirs: Optional[int] = None): super().__init__()self.d_input = d_input# 这里是3D XYZ,?self.skip = skip# 是要跳过什么?为啥要跳过?被遮挡?self.act = nn.functional.reluself.d_viewdirs = d_viewdirs# d_viewdirs 是2D方向?# Create model layers# [if_true 就执行的指令] if [if_true条件] else [if_false]# 是否skip的区别是,训练输入维度是否多3维,# if i in skip =if i in (4,),似乎是判断i是否等于4# self.d_input=3 :如果层id=4,网络输入要加3维,这是为什么?第4层有何特殊的?self.layers = nn.ModuleList([nn.Linear(self.d_input, d_filter)] +[nn.Linear(d_filter + self.d_input, d_filter) if i in skip else \ nn.Linear(d_filter, d_filter) for i in range(n_layers - 1)])# Bottleneck layersif self.d_viewdirs is not None:# If using viewdirs, split alpha and RGBself.alpha_out = nn.Linear(d_filter, 1)self.rgb_filters = nn.Linear(d_filter, d_filter)self.branch = nn.Linear(d_filter + self.d_viewdirs, d_filter // 2)self.output = nn.Linear(d_filter // 2, 3) # 为啥要取一半?else:# If no viewdirs, use simpler outputself.output = nn.Linear(d_filter, 4) # d_filter=256,输出是4维RGBAdef forward(self,x: torch.Tensor, # ?viewdirs: Optional[torch.Tensor] = None) -> torch.Tensor: # Forward pass with optional view direction.if self.d_viewdirs is None and viewdirs is not None:raise ValueError('Cannot input x_direction')# Apply forward pass up to bottleneckx_input = x# 这里的x是几维?从下面的分离RGB和A看,应该是4D# 下面通过8层MLP训练RGBAfor i, layer in enumerate(self.layers):# 8层,每一层进行运算x = self.act(layer(x)) if i in self.skip:x = torch.cat([x, x_input], dim=-1)# Apply bottleneckbottleneck 瓶颈是啥?是不是最费算力的模块?if self.d_viewdirs is not None:# 从网络输出分离A,RGB还需要经过更多训练alpha = self.alpha_out(x)# Pass through bottleneck to get RGBx = self.rgb_filters(x) x = torch.concat([x, viewdirs], dim=-1)x = self.act(self.branch(x)) # self.branch shape: (d_filter // 2)x = self.output(x) # self.output shape: (3)# Concatenate alphas to outputx = torch.concat([x, alpha], dim=-1)else:# Simple outputx = self.output(x)return x
Denken: Was sind die Eingaben und Ausgaben dieser NERF-Klasse? Was passiert in diesem Kurs? Aus den Parametern der Funktion __init__ ist ersichtlich, dass sie hauptsächlich die Eingabe, den Pegel und die Dimension der 5D-Daten des neuronalen Netzwerks festlegt, dh die Position des Blickwinkels und die Richtung der Sichtlinie, und die Ausgabe ist RGBA. Frage: Ist die RGBA-Ausgabe ein Punkt? Oder handelt es sich um eine Reihe von Sichtlinien? Wenn es sich um eine Serie handelt, habe ich nicht gesehen, wie die Positionscodierung die RGBA jedes Abtastpunkts bestimmt. Ich habe keine Anweisungen gesehen, z. B. wenn es sich um einen Punkt handelt, welcher Punkt auf der Sichtlinie gehört dieser RGBA dazu? Ist es der RGBA-Punkt, der das Ergebnis einer Sammlung von visuellen Abtastpunkten ist, die mit den Augen gesehen werden? Aus dem NERF-Klassencode ist ersichtlich, dass das mehrschichtige Feedforward-Training hauptsächlich auf der Grundlage der Blickpunktposition und der Blickrichtung erfolgt. Die 5D-Blickpunktposition und die Blickrichtung werden eingegeben und der 4D-RGBA ausgegeben.
3.3 Differenzierbarer Volumenrenderer
Die RGBA-Ausgabepunkte befinden sich im 3D-Raum. Um sie also zu einem Bild zu synthetisieren, müssen Sie das in den Gleichungen 1-3 in Abschnitt 4 des Dokuments beschriebene Volumenintegral anwenden. Im Wesentlichen wird eine gewichtete Summierung aller Abtastwerte entlang der Sichtlinie jedes Pixels durchgeführt, um einen geschätzten Farbwert für dieses Pixel zu erhalten. Jede RGB-Probe wird mit ihrem Transparenz-Alpha-Wert gewichtet: Höhere Alpha-Werte weisen auf eine höhere Wahrscheinlichkeit hin, dass der abgetastete Bereich undurchsichtig ist, und daher ist es wahrscheinlicher, dass Punkte weiter entlang des Strahls verdeckt werden. Der kumulative Produktbetrieb sorgt dafür, dass diese weiteren Punkte unterdrückt werden.
Volumenrendering der ursprünglichen NeRF-Modellausgabe:
def raw2outputs(raw: torch.Tensor,z_vals: torch.Tensor,rays_d: torch.Tensor,raw_noise_std: float = 0.0,white_bkgd: bool = False) -> Tuple[torch.Tensor, torch.Tensor, torch.Tensor, torch.Tensor]:# 将原始的NeRF输出转为RGB和其他映射# Difference between consecutive elements of `z_vals`. [n_rays, n_samples]dists = z_vals[..., 1:] - z_vals[..., :-1]# ?这里减法的意义是啥?dists = torch.cat([dists, 1e10 * torch.ones_like(dists[..., :1])], dim=-1)# 将每个距离乘以其对应方向光线的范数,以转换为真实世界的距离(考虑非单位方向)dists = dists * torch.norm(rays_d[..., None, :], dim=-1)# 将噪声添加到模型对密度的预测中,用于在训练期间规范网络(防止漂浮物伪影)noise = 0.if raw_noise_std > 0.:noise = torch.randn(raw[..., 3].shape) * raw_noise_std# Predict density of each sample along each ray. Higher values imply# higher likelihood of being absorbed at this point. [n_rays, n_samples]alpha = 1.0 - torch.exp(-nn.functional.relu(raw[..., 3] + noise) * dists)# Compute weight for RGB of each sample along each ray. [n_rays, n_samples]# The higher the alpha, the lower subsequent weights are driven.weights = alpha * cumprod_exclusive(1. - alpha + 1e-10)# Compute weighted RGB map.rgb = torch.sigmoid(raw[..., :3])# [n_rays, n_samples, 3]rgb_map = torch.sum(weights[..., None] * rgb, dim=-2)# [n_rays, 3]# Estimated depth map is predicted distance.depth_map = torch.sum(weights * z_vals, dim=-1)# Disparity map is inverse depth.disp_map = 1. / torch.max(1e-10 * torch.ones_like(depth_map),depth_map / torch.sum(weights, -1))# Sum of weights along each ray. In [0, 1] up to numerical error.acc_map = torch.sum(weights, dim=-1)# To composite onto a white background, use the accumulated alpha map.if white_bkgd:rgb_map = rgb_map + (1. - acc_map[..., None])return rgb_map, depth_map, acc_map, weightsdef cumprod_exclusive(tensor: torch.Tensor) -> torch.Tensor:# (Courtesy of https://github.com/krrish94/nerf-pytorch)# Compute regular cumprod first.cumprod = torch.cumprod(tensor, -1)# "Roll" the elements along dimension 'dim' by 1 element.cumprod = torch.roll(cumprod, 1, -1)# Replace the first element by "1" as this is what tf.cumprod(..., exclusive=True) does.cumprod[..., 0] = 1.return cumprod
Frage: Was ist hier die Hauptfunktion? Was wurde eingegeben? Was ist Ausgabe?
3.4 Stratified Sampling
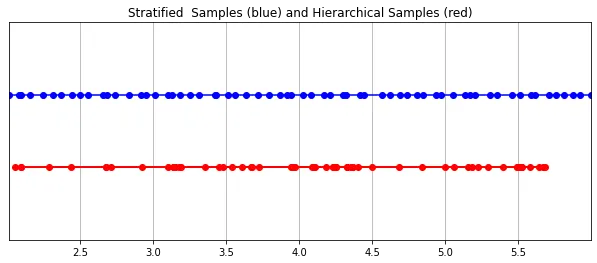
Der von der Kamera erfasste endgültige RGB-Wert ist die Ansammlung von Lichtproben entlang der Sichtlinie, die durch das Pixel verläuft. Die klassische Volumenrendering-Methode besteht darin, Punkte entlang der Sichtlinie zu akkumulieren und diese dann zu integrieren Punkte an jedem Punkt, Schätzung der Wahrscheinlichkeit, dass sich ein Lichtstrahl bewegt, ohne auf Partikel zu treffen. Daher muss jedes Pixel Punkte entlang des durch es hindurchgehenden Strahls abtasten. Um das Integral bestmöglich zu approximieren, unterteilt ihre geschichtete Stichprobenmethode den Raum gleichmäßig in N Behälter und entnimmt aus jedem Behälter gleichmäßig eine Stichprobe. Anstatt einfach Stichproben in gleichen Abständen zu ziehen, ermöglicht die geschichtete Stichprobenmethode dem Modell, Stichproben im kontinuierlichen Raum durchzuführen und so das Netzwerk so zu konditionieren, dass es im kontinuierlichen Raum lernt.
Bilder In PyTorch implementierte hierarchische Abtastung:
In PyTorch implementierte hierarchische Abtastung:
def sample_stratified(rays_o: torch.Tensor,rays_d: torch.Tensor,near: float,far: float,n_samples: int,perturb: Optional[bool] = True,inverse_depth: bool = False) -> Tuple[torch.Tensor, torch.Tensor]:# Sample along ray from regularly-spaced bins.# Grab samples for space integration along rayt_vals = torch.linspace(0., 1., n_samples, device=rays_o.device)if not inverse_depth:# Sample linearly between `near` and `far`z_vals = near * (1.-t_vals) + far * (t_vals)else:# Sample linearly in inverse depth (disparity)z_vals = 1./(1./near * (1.-t_vals) + 1./far * (t_vals))# Draw uniform samples from bins along rayif perturb:mids = .5 * (z_vals[1:] + z_vals[:-1])upper = torch.concat([mids, z_vals[-1:]], dim=-1)lower = torch.concat([z_vals[:1], mids], dim=-1)t_rand = torch.rand([n_samples], device=z_vals.device)z_vals = lower + (upper - lower) * t_randz_vals = z_vals.expand(list(rays_o.shape[:-1]) + [n_samples])# Apply scale from `rays_d` and offset from `rays_o` to samples# pts: (width, height, n_samples, 3)pts = rays_o[..., None, :] + rays_d[..., None, :] * z_vals[..., :, None]return pts, z_vals
3.5 Hierarchische Volumenabtastung (Hierarchical Volume Sampling)
Das Strahlungsfeld wird durch zwei mehrschichtige Perzeptrone dargestellt: eines arbeitet auf einer groben Ebene und die Szene Einer kodiert umfassende Struktureigenschaften; der andere verfeinert Details auf einer feinen Ebene und ermöglicht so dünne und komplexe Strukturen wie Netze und Zweige. Darüber hinaus sind die empfangenen Proben unterschiedlich, wobei grobe Modelle große, meist regelmäßig verteilte Proben über den gesamten Strahl verarbeiten, während feine Modelle Regionen mit starken Prioritäten verfeinern, um hervorstechende Informationen zu erhalten.
这种“珩磨”过程是通过层次体积采样流程完成的。3D空间实际上非常稀疏,存在遮挡,因此大多数点对渲染图像的贡献不大。因此,对具有对积分贡献可能性高的区域进行过采样(oversample)更有好处。他们将学习到的归一化权重应用于第一组样本,以在光线上创建PDF,然后再将inverse transform sampling应用于该PDF以收集第二组样本。该集合与第一集合相结合,并被馈送到精细网络以产生最终输出。
分层采样PyTorch实现:
def sample_hierarchical(rays_o: torch.Tensor,rays_d: torch.Tensor,z_vals: torch.Tensor,weights: torch.Tensor,n_samples: int,perturb: bool = False) -> Tuple[torch.Tensor, torch.Tensor, torch.Tensor]:# Apply hierarchical sampling to the rays.# Draw samples from PDF using z_vals as bins and weights as probabilities.z_vals_mid = .5 * (z_vals[..., 1:] + z_vals[..., :-1])new_z_samples = sample_pdf(z_vals_mid, weights[..., 1:-1], n_samples, perturb=perturb)new_z_samples = new_z_samples.detach()# Resample points from ray based on PDF.z_vals_combined, _ = torch.sort(torch.cat([z_vals, new_z_samples], dim=-1), dim=-1)# [N_rays, N_samples + n_samples, 3]pts = rays_o[..., None, :] + rays_d[..., None, :] * z_vals_combined[..., :, None]return pts, z_vals_combined, new_z_samplesdef sample_pdf(bins: torch.Tensor, weights: torch.Tensor, n_samples: int, perturb: bool = False) -> torch.Tensor:# Apply inverse transform sampling to a weighted set of points.# Normalize weights to get PDF.# [n_rays, weights.shape[-1]]pdf = (weights + 1e-5) / torch.sum(weights + 1e-5, -1, keepdims=True) # Convert PDF to CDF.cdf = torch.cumsum(pdf, dim=-1) # [n_rays, weights.shape[-1]]# [n_rays, weights.shape[-1] + 1]cdf = torch.concat([torch.zeros_like(cdf[..., :1]), cdf], dim=-1) # Take sample positions to grab from CDF. Linear when perturb == 0.if not perturb:u = torch.linspace(0., 1., n_samples, device=cdf.device)u = u.expand(list(cdf.shape[:-1]) + [n_samples]) # [n_rays, n_samples]else:# [n_rays, n_samples]u = torch.rand(list(cdf.shape[:-1]) + [n_samples], device=cdf.device) # Find indices along CDF where values in u would be placed.u = u.contiguous() # Returns contiguous tensor with same values.inds = torch.searchsorted(cdf, u, right=True) # [n_rays, n_samples]# Clamp indices that are out of bounds.below = torch.clamp(inds - 1, min=0)above = torch.clamp(inds, max=cdf.shape[-1] - 1)inds_g = torch.stack([below, above], dim=-1) # [n_rays, n_samples, 2]# Sample from cdf and the corresponding bin centers.matched_shape = list(inds_g.shape[:-1]) + [cdf.shape[-1]]cdf_g = torch.gather(cdf.unsqueeze(-2).expand(matched_shape), dim=-1,index=inds_g)bins_g = torch.gather(bins.unsqueeze(-2).expand(matched_shape), dim=-1, index=inds_g)# Convert samples to ray length.denom = (cdf_g[..., 1] - cdf_g[..., 0])denom = torch.where(denom <h3>4 Training</h3><p>论文中训练NeRF推荐的每网络8层、每层256维的架构在训练过程中会消耗大量内存。缓解这种情况的方法是将前传(forward pass)分成更小的部分,然后在这些部分上积累梯度。注意与minibatching的区别:梯度是在采样光线的单个小批次上累积的,这些光线可能已经被收集成块。如果没有论文中使用的NVIDIA V100类似性能的GPU,可能必须相应地调整块大小以避免OOM错误。Colab笔记本采用了更小的架构和更适中的分块尺寸。</p><p>我个人发现,由于局部极小值,即使选择了许多默认值,NeRF的训练也有些棘手。一些有帮助的技术包括早期训练迭代和早期重新启动期间的中心裁剪(center cropping)。随意尝试不同的超参数和技术,以进一步提高训练收敛性。</p><h4>初始化</h4><pre class="brush:php;toolbar:false">def init_models():# Initialize models, encoders, and optimizer for NeRF training.encoder = PositionalEncoder(d_input, n_freqs, log_space=log_space)encode = lambda x: encoder(x)# View direction encodersif use_viewdirs:encoder_viewdirs = PositionalEncoder(d_input, n_freqs_views,log_space=log_space)encode_viewdirs= lambda x: encoder_viewdirs(x)d_viewdirs = encoder_viewdirs.d_outputelse:encode_viewdirs = Noned_viewdirs = Nonemodel = NeRF(encoder.d_output, n_layers=n_layers, d_filter=d_filter, skip=skip,d_viewdirs=d_viewdirs)model.to(device)model_params = list(model.parameters())if use_fine_model:fine_model = NeRF(encoder.d_output, n_layers=n_layers, d_filter=d_filter, skip=skip,d_viewdirs=d_viewdirs)fine_model.to(device)model_params = model_params + list(fine_model.parameters())else:fine_model = Noneoptimizer= torch.optim.Adam(model_params, lr=lr)warmup_stopper = EarlyStopping(patience=50)return model, fine_model, encode, encode_viewdirs, optimizer, warmup_stopper
训练
def train():# Launch training session for NeRF.# Shuffle rays across all images.if not one_image_per_step:height, width = images.shape[1:3]all_rays = torch.stack([torch.stack(get_rays(height, width, focal, p), 0) for p in poses[:n_training]], 0)rays_rgb = torch.cat([all_rays, images[:, None]], 1)rays_rgb = torch.permute(rays_rgb, [0, 2, 3, 1, 4])rays_rgb = rays_rgb.reshape([-1, 3, 3])rays_rgb = rays_rgb.type(torch.float32)rays_rgb = rays_rgb[torch.randperm(rays_rgb.shape[0])]i_batch = 0train_psnrs = []val_psnrs = []iternums = []for i in trange(n_iters):model.train()if one_image_per_step:# Randomly pick an image as the target.target_img_idx = np.random.randint(images.shape[0])target_img = images[target_img_idx].to(device)if center_crop and i = rays_rgb.shape[0]:rays_rgb = rays_rgb[torch.randperm(rays_rgb.shape[0])]i_batch = 0target_img = target_img.reshape([-1, 3])# Run one iteration of TinyNeRF and get the rendered RGB image.outputs = nerf_forward(rays_o, rays_d, near, far, encode, model, kwargs_sample_stratified=kwargs_sample_stratified, n_samples_hierarchical=n_samples_hierarchical, kwargs_sample_hierarchical=kwargs_sample_hierarchical, fine_model=fine_model, viewdirs_encoding_fn=encode_viewdirs, chunksize=chunksize)# Backprop!rgb_predicted = outputs['rgb_map']loss = torch.nn.functional.mse_loss(rgb_predicted, target_img)loss.backward()optimizer.step()optimizer.zero_grad()psnr = -10. * torch.log10(loss)train_psnrs.append(psnr.item())# Evaluate testimg at given display rate.if i % display_rate == 0:model.eval()height, width = testimg.shape[:2]rays_o, rays_d = get_rays(height, width, focal, testpose)rays_o = rays_o.reshape([-1, 3])rays_d = rays_d.reshape([-1, 3])outputs = nerf_forward(rays_o, rays_d, near, far, encode, model, kwargs_sample_stratified=kwargs_sample_stratified, n_samples_hierarchical=n_samples_hierarchical, kwargs_sample_hierarchical=kwargs_sample_hierarchical, fine_model=fine_model, viewdirs_encoding_fn=encode_viewdirs, chunksize=chunksize)rgb_predicted = outputs['rgb_map']loss = torch.nn.functional.mse_loss(rgb_predicted, testimg.reshape(-1, 3))val_psnr = -10. * torch.log10(loss)val_psnrs.append(val_psnr.item())iternums.append(i)# Check PSNR for issues and stop if any are found.if i == warmup_iters - 1:if val_psnr <h4>训练</h4><pre class="brush:php;toolbar:false"># Run training session(s)for _ in range(n_restarts):model, fine_model, encode, encode_viewdirs, optimizer, warmup_stopper = init_models()success, train_psnrs, val_psnrs = train()if success and val_psnrs[-1] >= warmup_min_fitness:print('Training successful!')breakprint(f'Done!')5 Conclusion
辐射场标志着处理3D数据的方式发生了巨大变化。NeRF模型和更广泛的可微分渲染正在迅速弥合图像创建和体积场景创建之间的差距。虽然我们的组件可能看起来非常复杂,但受vanilla NeRF启发的无数其他方法证明,基本概念(连续函数逼近器+可微分渲染器)是构建各种解决方案的坚实基础,这些解决方案可用于几乎无限的情况。
原文:NeRF From Nothing: A Tutorial with PyTorch | Towards Data Science
原文链接:https://mp.weixin.qq.com/s/zxJAIpAmLgsIuTsPqQqOVg
Das obige ist der detaillierte Inhalt vonWas ist NeRF? Ist die NeRF-basierte 3D-Rekonstruktion voxelbasiert?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Beispiel-Tutorial zur Verwendung von Base64 zur Verbesserung visueller Effekte
- So exportieren Sie ein Modell in Navicat
- Was sind im ISO/OSI-Referenzmodell die Hauptfunktionen der Netzwerkschicht?
- Machine Vision und Deep Learning-Technologien in PHP
- Ein Artikel zum Verständnis von Computer Vision, voller nützlicher Informationen