
Heim >Technologie-Peripheriegeräte >KI >Neuer Algorithmus für Roboter zur Navigation durch Menschenmengen kommt heraus
Neuer Algorithmus für Roboter zur Navigation durch Menschenmengen kommt heraus

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-10-13 17:29:01690Durchsuche
Roboter werden in vielen Bereichen eingesetzt, beispielsweise im Take-out-Bereich, bei der Expresszustellung, bei der Flughafenführung und bei der Bauingenieurinspektion. Eine der Schwierigkeiten besteht jedoch darin, sich in der Menge zu bewegen
Derzeit verlassen sich Roboter hauptsächlich auf Kameras und andere Sensoren, um die Umgebung zu beobachten. Diese Lösung ist jedoch nicht stabil und die umliegende Menschenmenge passt ihre Richtung dynamisch an, sodass der Roboter nur schwer in Menschenmengenszenen eingesetzt werden kann.
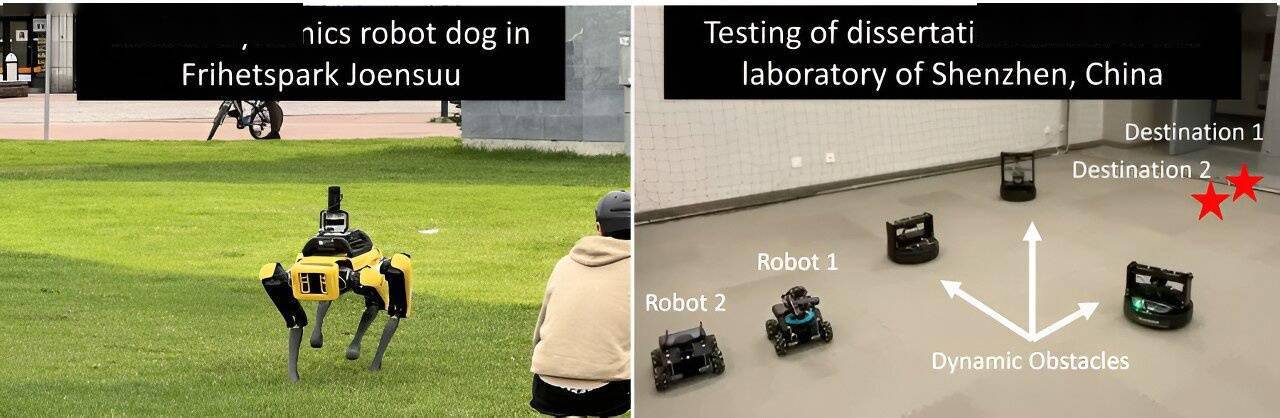
In der neuesten Arbeit schlägt Chengmin Zhou, MSc, einen Reinforcement-Learning-Algorithmus (RL) vor, um Roboter bei der Bewegung in Menschenmengen anzuleiten
Dies ist ein modellfreier Reinforcement-Learning-Algorithmus, der es Robotern ermöglicht, aus historischen Erfahrungen zu lernen. Nach dem Training oder Lernen kann der Roboter auch in herausfordernden Situationen navigieren.
IT-Home-Hinweis: Diese Methode birgt auch viele Herausforderungen, wie z. B. einen langsamen Lerneffekt, die Unfähigkeit, Sensorinformationen effizient zu analysieren, was dazu führt, dass komplexe Massenszenen nicht effektiv bewältigt werden können usw.
Das obige ist der detaillierte Inhalt vonNeuer Algorithmus für Roboter zur Navigation durch Menschenmengen kommt heraus. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Verwendung von Python zur Implementierung der automatischen Antwort kleiner Roboter und zur skalierbaren Entwicklung kleiner Roboter für öffentliche WeChat-Konten
- Detailliertes Beispiel für die Implementierung eines Chatbots mithilfe der Python+Slack-API
- Was sind die Merkmale kollaborativer Roboter?
- Roboter halten zunehmend Einzug in unser Lernleben. Welche Technologien werden hauptsächlich eingesetzt?
- Detaillierte Analyse, Schritt für Schritt zum Aufbau Ihres Chatbots mit GPT