

 Technologie-PeripheriegeräteKIVerbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen
Technologie-PeripheriegeräteKIVerbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren UmgebungenVerbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen

Titel der Abschlussarbeit: „Trajektorienplanungsmethode für autonome Fahrzeuge in unsicheren Umgebungen basierend auf einer verbesserten modellprädiktiven Steuerung“
Veröffentlichte Zeitschrift: IEEE Transactions on Intelligent Transportation Systems
Veröffentlichungsdatum: April 2023
Das Folgende sind meine eigenen Lesenotizen für die Arbeit Dies sind hauptsächlich die Teile, die meiner Meinung nach die Schlüsselpunkte sind, nicht die vollständige Textübersetzung. Dieser Artikel folgt dem vorherigen Artikel und sortiert den experimentellen Verifizierungsteil dieses Artikels. Der vorherige Artikel lautet wie folgt: Das Folgende sind meine eigenen Notizen zum Lesen des Artikels, hauptsächlich die Teile, die meiner Meinung nach die wichtigsten Punkte sind, nicht die vollständige Textübersetzung. Dieser Artikel folgt dem vorherigen Artikel und sortiert den experimentellen Überprüfungsteil dieses Artikels. Der vorherige Artikel lautet wie folgt:
fhwim: Eine Trajektorienplanungsmethode basierend auf einer verbesserten modellprädiktiven Steuerung für autonome Fahrzeuge in unsicheren Umgebungen
https://zhuanlan.zhihu.com/p/658708080
1. Simulationsüberprüfung
(1) Simulationsumgebung
Zu den Co-Simulationstools gehören Prescan, PyCharm, Matlab/Simulink, darunter Prescan zum Erstellen simulierter Verkehrsszenen und PyCharm (einfach mit neuronalem Netzwerk oder Pytorch) zum Schreiben des Fusionsvorhersagemoduls , Matlab/Simulink (mit MPC-Toolbox) wird verwendet, um das Trajektorienplanungsmodul zu erstellen und die Fahrzeugsteuerung zu realisieren. Die allgemeine Idee der Werkzeugauswahl ist relativ natürlich und vernünftig. Die zur Steuerung dieses Teils verwendete horizontale Steuerung ist LQR, und die vertikale Steuerung verwendet PID, was ebenfalls eine relativ häufige Steuerungsmethode ist. Der LSTM-Encoder-Decoder im Fusion-Vorhersagemodul verwendet Open-Source-Code. Der Autor sagte, er stamme aus der Referenz [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances, aber ich habe gesehen, dass dieser Artikel im Jahr 2011 veröffentlicht wurde. Es ist etwas alt (wo war die LSTM-Encoder-Dekodierung im Jahr 2011? Ich weiß nicht, ob der Autor den Code auf dieser Grundlage geändert hat. Abbildung 1: Einrichtung der Simulationsumgebung 1: statische Vermeidung Hindernisszene
Statische Hindernisvermeidungsszene bezieht sich auf ein stehendes Hindernisfahrzeug. Das Ergebnis der Flugbahnplanung ist wie folgt: 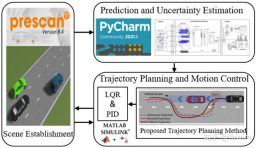
Vergleichen Sie die allgemeine MPC-Methode und die Pipeline-basierte MPC-Methode in Abbildung 3
Hier vermute ich, dass er eine Legende hat Frage: Laut dem vorherigen Artikel wird die endgültige Referenztrajektorie durch Addition der gewünschten Trajektorie und der Anpassungstrajektorie erhalten. Gleichzeitig sagte er bei der Analyse der Ergebnisse auch, dass der rohrbasierte MPC in den Bereichen 
 in Abbildung 3(b) Der Fehler ist groß. Da die Anpassungs-Trajektorie den Fehler verringert, sollte es mit der Logik seines Artikels übereinstimmen, dass die beiden Legenden der gewünschten Trajektorie und der Referenz-Trajektorie in Abbildung 3(b). ) sollte ausgetauscht werden. Das heißt, die grüne Linie ist die endgültige Referenztrajektorie. Die blaue Linie ist die gewünschte Trajektorie des Zwischenergebnisses. Einschließlich der Geschwindigkeitskurve und der horizontalen und vertikalen Fehlerkurven unten, aber Sie können wahrscheinlich verstehen, was der Autor meint. Die grüne Kurve im röhrenbasierten MPC ist das Endergebnis und die blaue Kurve ist das Ergebnis ohne Anpassungsbahn.
in Abbildung 3(b) Der Fehler ist groß. Da die Anpassungs-Trajektorie den Fehler verringert, sollte es mit der Logik seines Artikels übereinstimmen, dass die beiden Legenden der gewünschten Trajektorie und der Referenz-Trajektorie in Abbildung 3(b). ) sollte ausgetauscht werden. Das heißt, die grüne Linie ist die endgültige Referenztrajektorie. Die blaue Linie ist die gewünschte Trajektorie des Zwischenergebnisses. Einschließlich der Geschwindigkeitskurve und der horizontalen und vertikalen Fehlerkurven unten, aber Sie können wahrscheinlich verstehen, was der Autor meint. Die grüne Kurve im röhrenbasierten MPC ist das Endergebnis und die blaue Kurve ist das Ergebnis ohne Anpassungsbahn.

Abbildung 4 zeigt den Vergleich der Geschwindigkeitsänderungen zwischen der allgemeinen MPC-Methode und der Pipeline-basierten MPC-Methode.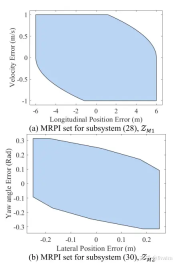
Abbildung 5 Vergleich der Querpositionen die horizontalen und vertikalen Fehler Abbildung 6
Der Autor hat auch die Sanftheit der Lenkradwinkeländerungen verglichen, auf die ich hier nicht näher eingehen werde. Kurz gesagt, sie hat sich verbessert. Gleichzeitig schlug der Autor eine gute theoretische Grundlage für die Anpassung der Flugbahn vor. Nach dem Hinzufügen liegt der Flugbahnfehler immer innerhalb des MRPI-Satzes, also der Spurabweichung der röhrenbasierten modellprädiktiven Steuerung (Röhrenbasierte MPC) liegt immer innerhalb des MRPI-Sets. Die allgemeine modellprädiktive Steuerung (MPC) hat in einer unsicheren Umgebung keine Grenze, die sehr groß sein kann
(4) Fall 2: dynamische Hindernisvermeidungsszene
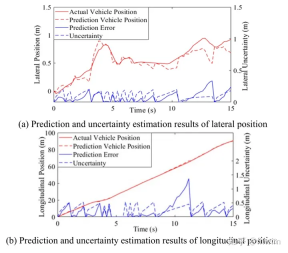
Im Vergleich dazu In der vorherigen Szene setzt sich nun das Hindernisauto in Bewegung. Wir werden nicht näher auf die Gesamtflugbahn, Geschwindigkeitsänderungen, horizontale und vertikale Fehler und die Sanftheit der Lenkradänderungen eingehen. Hier wird nur eine Veranschaulichung der gesamten Flugbahn gezeigt Der Autor entscheidet sich für die Verwendung des NGSIM-Datensatzes zur Validierung Ihrer Methode. Zunächst validierten die Autoren die Fusionsvorhersagemethode. Der NGSIM-Datensatz enthält Fahrzeugtrajektoriendaten, die der Autor in historische Trajektorien und zukünftige Trajektorien aufteilte und einen Trainingssatz für das Lernen des LSTM-Encoders/Decoders erstellte. Der Autor wählte 10.000 Trajektorien aus, von denen 7.500 als Trainingssatz und 2.500 als Validierungssatz verwendet wurden. Der Optimierer nimmt Adam und setzt die Lernrate auf 0,01. Der Vorhersageeffekt ist in der folgenden Abbildung dargestellt. FDE usw. Ich denke, dieser Ansatz ist nicht überzeugend, aber es kann auch verstanden werden, dass der Schwerpunkt dieses Artikels auf der Trajektorienplanung basierend auf röhrenbasiertem MPC liegt
Nach der Überprüfung der Trajektorienvorhersage wurde eine Trajektorienplanung durchgeführt, um die Rolle des Trajektorienvorhersagemoduls weiter zu überprüfen . Hier ist ein Vergleich. Es gibt drei Situationen: 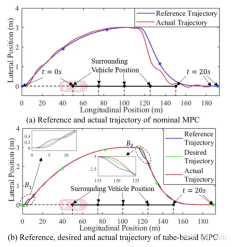
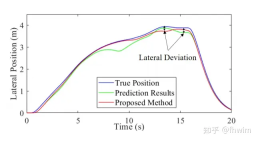
Abbildung 9 zeigt die Ergebnisse von (a), (b) und (c), entsprechend der wahren Position, den Vorhersageergebnissen bzw. der vorgeschlagenen Methode.
 Die vorgeschlagene Methode ist das Ergebnis, das mit der Methode in erhalten wurde In diesem Artikel können Sie sehen, dass die vorgeschlagene Methode näher an True Position liegt und zeigt, dass diese Fusionsvorhersagemethode (insbesondere die Berechnung der Unsicherheit) effektiv ist.
Die vorgeschlagene Methode ist das Ergebnis, das mit der Methode in erhalten wurde In diesem Artikel können Sie sehen, dass die vorgeschlagene Methode näher an True Position liegt und zeigt, dass diese Fusionsvorhersagemethode (insbesondere die Berechnung der Unsicherheit) effektiv ist.
Der Inhalt, der neu geschrieben werden muss, ist: Abbildung 11 Die Die Parameter des Computers und des Sensors
 müssen neu geschrieben werden. Der Inhalt lautet: Parameter des Versuchsfahrzeugs, Abbildung 12
müssen neu geschrieben werden. Der Inhalt lautet: Parameter des Versuchsfahrzeugs, Abbildung 12
Aus Sicherheitsgründen ist die vom Autor eingerichtete Versuchsszene dieselbe wie die Simulationsexperimentfall 1. Es handelt sich um eine statische Hindernisvermeidungsszene. Es ist besser, die Gesamtflugbahn, Geschwindigkeitsänderungen, horizontale und vertikale Fehler zu vergleichen. und die Sanftheit der Lenkradveränderungen, die nicht im Detail beschrieben werden.
3. Zusammenfassung der Lektüre
Zunächst geht es in der Arbeit um das Trajektorienvorhersagemodul mit Unsicherheitsberechnung und das auf röhrenbasiertem MPC basierende Trajektorienplanungsmodul. Unter ihnen ist das Trajektorienplanungsmodul der Hauptinhalt. Ich bin mit dieser modularen Form sehr zufrieden, da sie die Flugbahnvorhersage wirklich auf die Flugbahnplanung anwendet. Die Vorhersageausgabe wird als Planungseingabe verwendet, und das Planungsmodul bestimmt nur einen Sicherheitsschwellenwert für das Vorhersagemodul, und die Kopplung zwischen den beiden Modulen ist schwach. Mit anderen Worten: Das Vorhersagemodul kann durch andere Methoden ersetzt werden, solange es die Ergebnisse der Vorhersage der Flugbahn und der Unsicherheit des Hindernisautos liefern kann. In Zukunft könnten fortschrittlichere neuronale Netze in Betracht gezogen werden, um Flugbahnen und Unsicherheiten direkt vorherzusagen. Insgesamt ist der Prozess dieses Fusionsvorhersagealgorithmus etwas kompliziert, aber ich finde die Idee des Artikels sehr gut. Auch die Ideen und der Arbeitsaufwand der Simulation und der tatsächlichen Fahrzeugtests sind zufriedenstellend
Zweitens wurden beim Lesen des Artikels einige geringfügige Fehler entdeckt. Im LSTM-Encoder-Decoder-Teil ist die LSTM-Ausgabe beispielsweise der Trajektorienpunkt des zukünftigen -Schritts, der auch in der Formel geschrieben ist, im Text jedoch als geschrieben ist.

Abbildung 13 Einige Fehler im LSTM-Encoder-Decoder-Teil
Dann wird im Simulationsexperimentteil bei der Berechnung des MRPI-Sets gesagt, dass System (21), also das Fehlersystem, in Subsysteme unterteilt ist (32) und (34), aber eigentlich Subsysteme (30) und (32), diese kleinen Fehler wirken sich nicht auf die Gesamtmethode aus, sondern wirken sich auch auf das Leseerlebnis des Lesers aus.

Abbildung 14 Simulationsexperiment Teil MRPI Originaltext festlegen
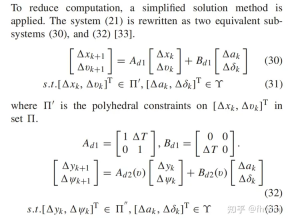
Das Fehlersystem in Abbildung 15 ist in die Subsysteme (30) und (32) unterteilt

Originaltext-Link: https://mp . weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
Das obige ist der detaillierte Inhalt vonVerbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

 So erstellen Sie Ihren persönlichen KI -Assistenten mit Smollm mit Umarmung. SmollmApr 18, 2025 am 11:52 AM
So erstellen Sie Ihren persönlichen KI -Assistenten mit Smollm mit Umarmung. SmollmApr 18, 2025 am 11:52 AMNutzen Sie die Kraft von AI On-Device: Bauen eines persönlichen Chatbot-Cli In der jüngeren Vergangenheit schien das Konzept eines persönlichen KI -Assistenten wie Science -Fiction zu sein. Stellen Sie sich Alex vor, ein Technik -Enthusiast, der von einem klugen, lokalen KI -Begleiter träumt - einer, der nicht angewiesen ist
 KI für psychische Gesundheit wird aufmerksam durch aufregende neue Initiative an der Stanford University analysiertApr 18, 2025 am 11:49 AM
KI für psychische Gesundheit wird aufmerksam durch aufregende neue Initiative an der Stanford University analysiertApr 18, 2025 am 11:49 AMIhre Eröffnungseinführung von AI4MH fand am 15. April 2025 statt, und Luminary Dr. Tom Insel, M. D., berühmter Psychiater und Neurowissenschaftler, diente als Kick-off-Sprecher. Dr. Insel ist bekannt für seine herausragende Arbeit in der psychischen Gesundheitsforschung und für Techno
 Die 2025 WNBA -Entwurfsklasse tritt in eine Liga ein, die wächst und gegen Online -Belästigung kämpftApr 18, 2025 am 11:44 AM
Die 2025 WNBA -Entwurfsklasse tritt in eine Liga ein, die wächst und gegen Online -Belästigung kämpftApr 18, 2025 am 11:44 AM"Wir möchten sicherstellen, dass die WNBA ein Raum bleibt, in dem sich alle, Spieler, Fans und Unternehmenspartner sicher fühlen, geschätzt und gestärkt sind", erklärte Engelbert und befasste sich mit dem, was zu einer der schädlichsten Herausforderungen des Frauensports geworden ist. Die Anno
 Umfassende Anleitung zu Python -integrierten Datenstrukturen - Analytics VidhyaApr 18, 2025 am 11:43 AM
Umfassende Anleitung zu Python -integrierten Datenstrukturen - Analytics VidhyaApr 18, 2025 am 11:43 AMEinführung Python zeichnet sich als Programmiersprache aus, insbesondere in der Datenwissenschaft und der generativen KI. Eine effiziente Datenmanipulation (Speicherung, Verwaltung und Zugriff) ist bei der Behandlung großer Datensätze von entscheidender Bedeutung. Wir haben zuvor Zahlen und ST abgedeckt
 Erste Eindrücke von OpenAIs neuen Modellen im Vergleich zu AlternativenApr 18, 2025 am 11:41 AM
Erste Eindrücke von OpenAIs neuen Modellen im Vergleich zu AlternativenApr 18, 2025 am 11:41 AMVor dem Eintauchen ist eine wichtige Einschränkung: KI-Leistung ist nicht deterministisch und sehr nutzungsgewohnt. In einfacherer Weise kann Ihre Kilometerleistung variieren. Nehmen Sie diesen (oder einen anderen) Artikel nicht als endgültiges Wort - testen Sie diese Modelle in Ihrem eigenen Szenario
 AI -Portfolio | Wie baue ich ein Portfolio für eine KI -Karriere?Apr 18, 2025 am 11:40 AM
AI -Portfolio | Wie baue ich ein Portfolio für eine KI -Karriere?Apr 18, 2025 am 11:40 AMErstellen eines herausragenden KI/ML -Portfolios: Ein Leitfaden für Anfänger und Profis Das Erstellen eines überzeugenden Portfolios ist entscheidend für die Sicherung von Rollen in der künstlichen Intelligenz (KI) und des maschinellen Lernens (ML). Dieser Leitfaden bietet Rat zum Erstellen eines Portfolios
 Welche Agenten KI könnte für Sicherheitsvorgänge bedeutenApr 18, 2025 am 11:36 AM
Welche Agenten KI könnte für Sicherheitsvorgänge bedeutenApr 18, 2025 am 11:36 AMDas Ergebnis? Burnout, Ineffizienz und eine Erweiterung zwischen Erkennung und Wirkung. Nichts davon sollte für jeden, der in Cybersicherheit arbeitet, einen Schock erfolgen. Das Versprechen der Agenten -KI hat sich jedoch als potenzieller Wendepunkt herausgestellt. Diese neue Klasse
 Google versus openai: Der KI -Kampf für SchülerApr 18, 2025 am 11:31 AM
Google versus openai: Der KI -Kampf für SchülerApr 18, 2025 am 11:31 AMSofortige Auswirkungen gegen langfristige Partnerschaft? Vor zwei Wochen hat Openai ein leistungsstarkes kurzfristiges Angebot vorangetrieben und bis Ende Mai 2025 den kostenlosen Zugang zu Chatgpt und Ende Mai 2025 gewährt. Dieses Tool enthält GPT-4O, A A A.


Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

SublimeText3 Linux neue Version
SublimeText3 Linux neueste Version

EditPlus chinesische Crack-Version
Geringe Größe, Syntaxhervorhebung, unterstützt keine Code-Eingabeaufforderungsfunktion

PHPStorm Mac-Version
Das neueste (2018.2.1) professionelle, integrierte PHP-Entwicklungstool

MinGW – Minimalistisches GNU für Windows
Dieses Projekt wird derzeit auf osdn.net/projects/mingw migriert. Sie können uns dort weiterhin folgen. MinGW: Eine native Windows-Portierung der GNU Compiler Collection (GCC), frei verteilbare Importbibliotheken und Header-Dateien zum Erstellen nativer Windows-Anwendungen, einschließlich Erweiterungen der MSVC-Laufzeit zur Unterstützung der C99-Funktionalität. Die gesamte MinGW-Software kann auf 64-Bit-Windows-Plattformen ausgeführt werden.

ZendStudio 13.5.1 Mac
Leistungsstarke integrierte PHP-Entwicklungsumgebung

