
Heim >Technologie-Peripheriegeräte >KI >Beunruhigenderweise verfügen Roboterhunde bereits über diese Fähigkeit
Beunruhigenderweise verfügen Roboterhunde bereits über diese Fähigkeit

- 王林nach vorne
- 2023-10-03 15:33:091135Durchsuche
Die Verwendung eines einzigen neuronalen Netzwerks zur Manipulation ist ein großer technologischer Durchbruch auf dem Gebiet der vierbeinigen Roboter.
Parkour ist eine Extremsportart, bei der die Teilnehmer die meiste Zeit Hindernisse auf sehr dynamische Weise überwinden müssen „ungeschickte“ Roboter scheinen eine unerreichbare Sache zu sein, doch in letzter Zeit gab es einige technologische Durchbrüche im Bereich der Robotersteuerung. Vor einigen Wochen berichtete diese Seite über eine Studie, die mithilfe von Methoden des Verstärkungslernens Roboterhunden das Erlernen von Parkour ermöglichte und dabei gute Ergebnisse erzielte. Kürzlich führte die Carnegie Mellon University (CMU) eine neue Studie durch, in der eine erstaunliche neue Methode für die Herausforderung des Parkour-Roboters mit Hunden vorgeschlagen wurde. Der Effekt wurde noch weiter verbessert, sodass die Leute einhellig „erstaunlich“ und „Es ist erstaunlich“ kommentierten.
Das Publikum sagte: „Es ist wie in „Black Mirror““Forschung an der Carnegie Mellon University ermöglicht es einem Roboterhund, sich wie ein Konkurrent in einem Hindernisparcours zu verhalten und automatisch diskontinuierliche Boxen zu überqueren. und problemlos zwischen Hängen mit unterschiedlichem Gefälle laufen und springen können
 , und die Geschwindigkeit beim Überwinden dieser Hindernisse ist ebenfalls sehr hoch.
, und die Geschwindigkeit beim Überwinden dieser Hindernisse ist ebenfalls sehr hoch. Springen Sie problemlos über eine Lücke von 0,8 Metern (2-fache Länge des Roboterhundes):
 Überklettern Sie Hindernisse mit einer Höhe von mehr als 0,51 Metern (2-fache Höhe des Roboterhundes):
Überklettern Sie Hindernisse mit einer Höhe von mehr als 0,51 Metern (2-fache Höhe des Roboterhundes):  Niemand Dieses Mal stand er fest, nutzte zum Ausgleich auch seine Hinterbeine und verhielt sich wie ein echter Hund.
Niemand Dieses Mal stand er fest, nutzte zum Ausgleich auch seine Hinterbeine und verhielt sich wie ein echter Hund. Der Roboterhund kann auch einige Dinge tun, die für Tiere in der realen Welt schwierig sind, wie zum Beispiel mit nur zwei Vorderbeinen laufen, was einem Gehen auf dem Kopf gleichkommt
 Er kann auch mit nur zwei Vorderbeinen Treppen hinuntergehen Vorderbeine:
Er kann auch mit nur zwei Vorderbeinen Treppen hinuntergehen Vorderbeine: Es ist, als würde man im Spiel auf einen Käfer stoßen, ein bisschen lustig und gleichzeitig mit einem Hauch des Uncanny-Valley-Effekts
Es ist, als würde man im Spiel auf einen Käfer stoßen, ein bisschen lustig und gleichzeitig mit einem Hauch des Uncanny-Valley-EffektsDas Ziel dieser Forschung ist es, eine kleine, kostengünstige Lösung zu ermöglichen Roboterhund, um Parkour-Aufgaben erfolgreich zu erledigen. Das Antriebssystem dieses Roboterhundes ist nicht präzise genug und verfügt nur über eine nach vorne gerichtete Tiefenkamera zur Wahrnehmung, die niederfrequent ist und anfällig für Jitter und Artefakte ist.
Die Studie schlägt ein neuronales Netzwerk vor, das auf roher Tiefe und integrierten Sensoreingaben basiert Netzwerk zur direkten Generierung von Gelenkwinkelbefehlen. Durch die Durchführung groß angelegter Simulationstrainings zum Reinforcement Learning ist diese Methode in der Lage, die durch Sensorungenauigkeiten und Aktuatorprobleme verursachten Herausforderungen zu lösen und so ein durchgängig hochpräzises Steuerungsverhalten zu erreichen. Dieses Forschungsprojekt wurde auf der Open-Source-Plattform veröffentlicht. Klicken Sie bitte auf den folgenden Link, um das Papier anzuzeigen: https://extreme-parkour.github.io/resources/parkour.pdf Adresse: https://extreme-parkour.github.io/resources/parkour.pdf /github.com/chengxuxin/extreme-parkour
 Einführung in die Methode
Einführung in die Methode- Diese Forschung verwendet eine End-to-End-Daten- getriebenes Verstärkungslernrahmen, um den Roboterhund mit der Fähigkeit zum „Parkour“ auszustatten. Damit sich der Roboterhund beim Einsatz selbst an die Art des Hindernisses anpassen kann, schlägt diese Forschung eine neuartige duale Destillationsmethode vor. Diese Strategie kann nicht nur flexible Bewegungsbefehle ausgeben, sondern auch die Richtung schnell entsprechend dem eingegebenen Tiefenbild anpassen.
Um ein einzelnes neuronales Netzwerk in die Lage zu versetzen, verschiedene Parkour-Skill-Verhaltensweisen zu charakterisieren, schlägt diese Studie ein einfaches und effektives allgemeines Belohnungsdesignprinzip vor, das auf inneren Produkten basiert.
Konkret zielt die Forschung darauf ab, ein neuronales Netzwerk direkt von der Rohtiefe und der Onboard-Erkennung bis hin zu Gelenkwinkelbefehlen zu trainieren. Um adaptive Bewegungsstrategien zu trainieren, wurde in dieser Studie die Methode der Regularized Online Adaptation (ROA) mit wichtigen Modifikationen für extreme Parkour-Aufgaben übernommen.
Experimentelle Ergebnisse
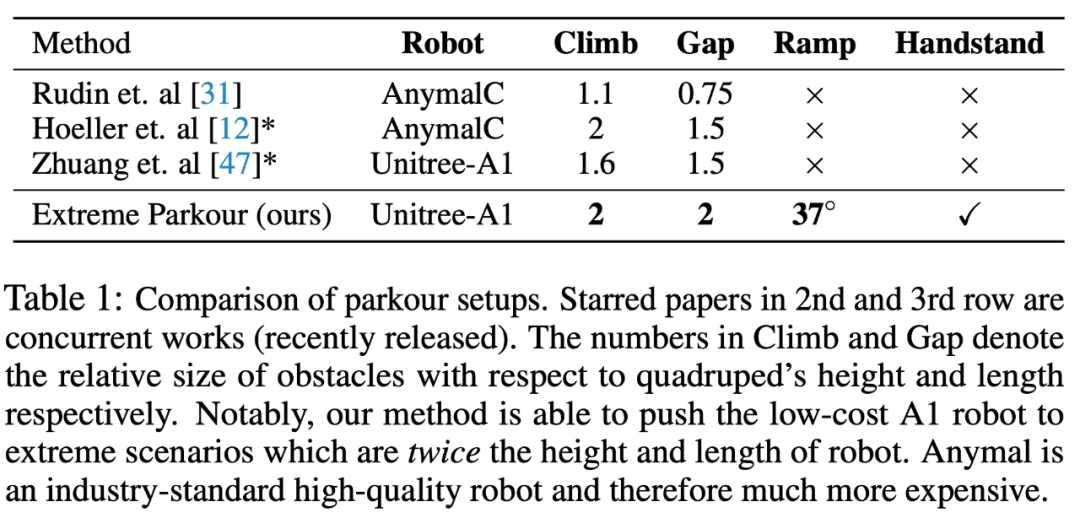
Ziel dieser Forschung ist es, den Roboterhund vier Fähigkeiten erlernen zu lassen, darunter Klettern, Überspringen von Lücken, Laufen und Springen auf Hängen und Stehen auf dem Kopf. Tabelle 1 unten zeigt die Vergleichsergebnisse im Vergleich zu mehreren anderen Methoden
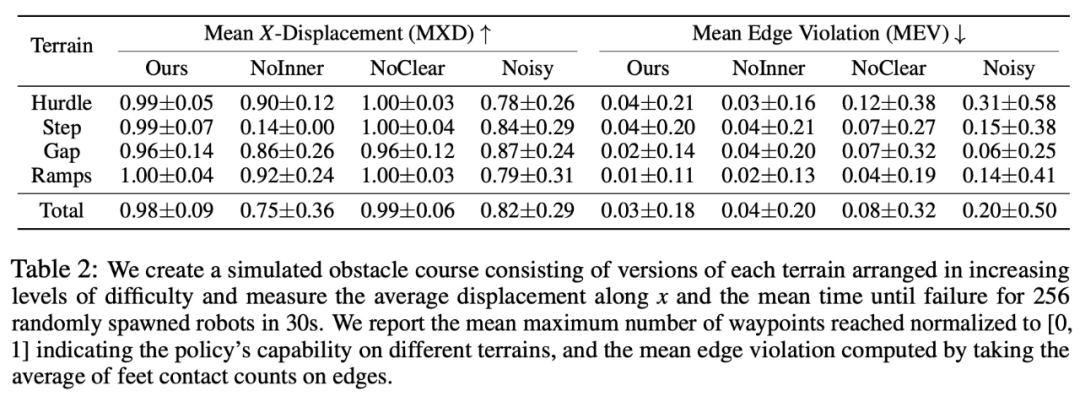
Um die Rolle jedes Teils im System zu überprüfen, wurden in der Studie zwei Sätze von Basislinien vorgeschlagen. Die Studie testete zunächst das Belohnungsdesign und den Gesamtprozess. Die Ergebnisse sind in der folgenden Tabelle 2 aufgeführt:
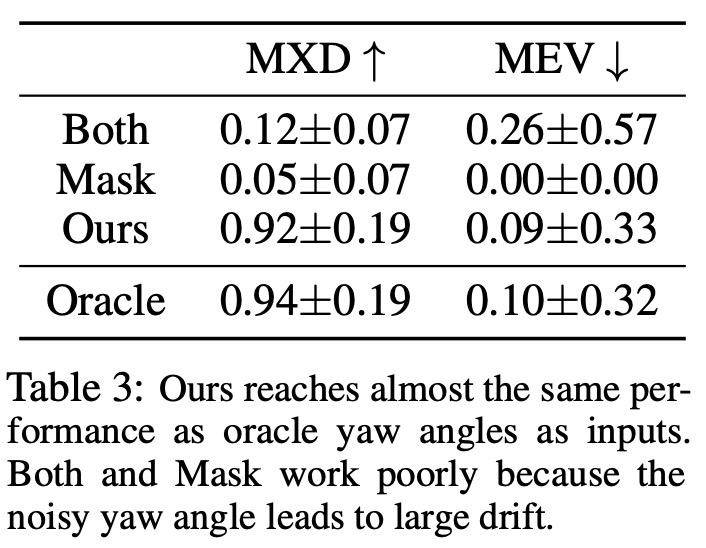
Der Zweck des zweiten Satzes von Basislinien besteht darin, den Destillationsaufbau zu testen, der BC für die Richtungsvorhersage und Dolch für enthält Aktionen. Die experimentellen Ergebnisse sind in Tabelle 3 dargestellt
Darüber hinaus führte die Studie auch eine Reihe realer Experimente durch, zeichnete die Erfolgsquote auf und verglich sie mit den NoClear- und NoDir-Basislinien. Die experimentellen Ergebnisse sind in Abbildung 7 dargestellt. Interessierte Leser können den Originaltext des Artikels lesen, um mehr über den Forschungsinhalt zu erfahren.
Das obige ist der detaillierte Inhalt vonBeunruhigenderweise verfügen Roboterhunde bereits über diese Fähigkeit. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Was ist ein Web-Frontend-Ingenieur? Was macht ein Web-Frontend-Ingenieur?
- Welche Kenntnisse müssen Linux-Betriebs- und Wartungsingenieure beherrschen?
- Was macht ein Java-Ingenieur hauptsächlich?
- Was ist der Unterschied zwischen einem Softwareentwickler und einem Programmierer?
- Die landesweite Tour der zweiten Generation von Tiedan beginnt: Der bionische Vierbeinerroboter von Xiaomi fährt in Xiaomi-Häuser in 80 Städten ein