
Heim >Technologie-Peripheriegeräte >KI >Realisierung der Mensch-Maschine-Zusammenarbeit in der Produktionsmontage: WIMI holografische Entwicklungsmontage und handgeführte Steuerungstechnologie basierend auf einer Gehirn-Computer-Schnittstelle
Realisierung der Mensch-Maschine-Zusammenarbeit in der Produktionsmontage: WIMI holografische Entwicklungsmontage und handgeführte Steuerungstechnologie basierend auf einer Gehirn-Computer-Schnittstelle

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-09-28 12:21:05660Durchsuche
In der modernen Fertigung haben die kontinuierliche Innovation und Weiterentwicklung der Technologie neue Möglichkeiten für den Produktionsprozess eröffnet. In den letzten Jahren können kollaborative Roboter (Cobots) als kompakte Maschinen nicht nur verschiedene Aufgaben ausführen, sondern auch mit menschlichen Bedienern zusammenarbeiten, um die Produktionseffizienz effektiv zu verbessern. Angesichts der Besonderheiten kleiner und mittlerer Unternehmen mit kleinen Produktionschargen, vielen und komplexen Aufgaben hat WIMI eine bahnbrechende Lösung für „Gehirn-Computer-Schnittstellen-basierte Montage und handgeführte Steuerungstechnik“ entwickelt, die neue Perspektiven eröffnet dem Produktionsbereich
Herkömmliche Produktionsprozesse erfordern oft einen hohen Kraft- und Energieaufwand des Bedieners, insbesondere in Umgebungen mit komplexen Aufgaben und hoher Wiederholgenauigkeit, was leicht zu Ermüdung des Bedieners und einer erhöhten Fehlerquote führen kann. Die Einführung kollaborativer Roboter hat den Unternehmen neue Möglichkeiten eröffnet. Kollaborative Roboter können aufgrund ihrer kompakten Größe und programmierbaren Funktionen eine Vielzahl von Aufgaben ausführen, die Arbeitsbelastung des Bedieners verringern und die Produktionseffizienz verbessern. Gerade für kleine und mittelständische Unternehmen wird die Einführung dieser Technologie ein wichtiger Wettbewerbsvorteil sein.
Um eine effiziente Kommunikation und Kooperation zwischen Menschen und kollaborativen Robotern zu erreichen, ist eine zentrale Frage die Gestaltung geeigneter Aufgaben und Interaktionsstrategien. Um dieses Problem zu lösen, schlug WIMI eine auf Gehirn-Computer-Schnittstellen basierende Strategie vor, die die Befehlssteuerung kollaborativer Roboter durch den Bediener durch Gehirn-Computer-Schnittstellentechnologie realisiert.
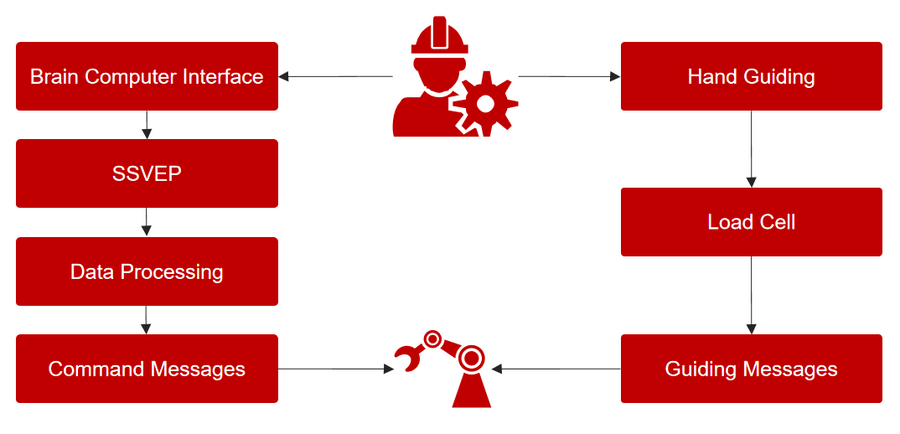
WIMIs holografische Technologie realisiert die Montage und manuelle Steuerung auf der Grundlage einer Gehirn-Computer-Schnittstelle und spielt eine Schlüsselrolle in der Gehirn-Computer-Schnittstellentechnologie. Brain-Computer-Interface (BCI) ist eine Technologie, die Gehirnaktivität erkennt und in Anweisungen umwandelt, die ein Computer verstehen kann. Bei dieser Technologie ist der Bediener in der Lage, über die SSVEP-Methode (Steady-State Visual Evoked Potential) Befehle an den kollaborativen Roboter zu senden. Dieser Ansatz ermöglicht es den Bedienern, den Missionsmodus zu wechseln, ohne ihre Hände zu benutzen. Darüber hinaus führt diese Technologie auch eine manuelle Führungssteuerung ein. Durch die Installation eines Sechskomponenten-Kraftsensors am Handgelenk des kollaborativen Roboters wird eine handgeführte Steuerung des kollaborativen Roboters erreicht
Im gesamten Produktions- und Montageprozess sind Aufgabenwechsel und Phasensynchronisation von entscheidender Bedeutung. Die auf Gehirn-Computer-Schnittstellen basierende Montage- und handgeführte Steuerungstechnologie von WIMI unterteilt den Zusammenarbeitsprozess in unabhängige Phasen und Unterstützungsphasen. In der unabhängigen Phase arbeiten der Roboter und der Bediener in einem gemeinsamen Szenario, um verschiedene Aufgaben zu erledigen. Sobald der Bediener die Hilfe des Roboters benötigt, kann er in die Unterstützungsphase wechseln, um einen kollaborativen Betrieb zwischen Mensch und Maschine zu erreichen. Dieses Umschalten wird erreicht, indem der Bediener eine Befehlsnachricht an die Gehirn-Computer-Schnittstelle sendet und so den Roboter im Voraus über die Absicht zum Umschalten informiertDarüber hinaus bieten die Montage- und handgeführte Steuerungstechnologie der holografischen Gehirn-Computer-Schnittstelle WIMI einen vollständigen Rahmen für praktische Anwendungen. Über eine Schnittstelle können Bediener mit dem kollaborativen Roboter interagieren. Im Hinblick auf Aktivitäten im Zusammenhang mit der Gehirn-Computer-Schnittstelle realisiert der Bediener die Befehlssteuerung des Roboters durch Beobachtung von Bildern. Diese Befehle werden an die Robotersteuerung weitergeleitet, nachdem sie von den Elektroden erfasst und verarbeitet wurden. Bei der manuellen Führungssteuerung hingegen kann der Bediener den Roboter über Sensoren am Handgelenk des Roboters führen. Der Ablauf des gesamten Montageprozesses hängt von vorprogrammierten Teilaufgaben des Roboters und Echtzeitbefehlen des Bedieners ab
Anwendung der Brain-Computer-Interface-Technologie (BCI): Brain-Computer-Interface-Technologie ist der Kern des technischen Weges. Bei dieser Technologie wird die Gehirnaktivität des Bedieners erfasst und in Anweisungen umgewandelt, die der Computer verstehen kann, wodurch die Steuerung des kollaborativen Roboters erreicht wird. In der auf einer Gehirn-Computer-Schnittstelle basierenden Montage- und handgeführten Steuerungstechnologie von WIMI werden durch die Anwendung der Gehirn-Computer-Schnittstellentechnologie Wechselabsichten für verschiedene Aufgabenmodi durch die Methode des stationären visuell evozierten Potenzials (SSVEP) erreicht
Datenerfassung und -verarbeitung: Der erste Schritt auf dem technischen Weg besteht darin, Daten über die Gehirnaktivität des Bedieners zu sammeln und zu verarbeiten. Dazu müssen Elektroenzephalogramm-Elektroden (EEG) am Kopf des Bedieners angebracht werden, um die vom Gehirn erzeugten elektrischen Signale zu erfassen. Diese elektrischen Signale werden zur Verarbeitung an einen Computer übertragen, um Informationen über die Absichten des Bedieners zu extrahieren
Befehlsgenerierung und -übermittlung: Durch die Analyse der vom Gehirn des Bedieners erzeugten elektrischen Signale kann der Computer entsprechende Befehle generieren. Diese Befehle stellen die Absicht des Bedieners dar, den Missionsmodus zu wechseln. Diese Befehle müssen an das Steuerungssystem des kollaborativen Roboters weitergeleitet werden, um das Verhalten des Roboters zu steuern.
Anwendung der manuellen Führungssteuerungstechnologie: In einem anderen Zweig dieses Technologiebereichs wird die manuelle Führungssteuerungstechnologie eingesetzt, um eine präzisere Steuerung zu erreichen. Die Umsetzung des kollaborativen Roboters erfolgt über einen Sechs-Komponenten-Kraftsensor. Der Sensor kann die Führungskraft der Hand des Bedieners erfassen und diese Informationen an das Robotersteuerungssystem übertragen
Steuerung und Ausführung: Die durch die Gehirn-Computer-Schnittstellentechnologie generierten Befehle und die durch die manuelle Führungssteuerungstechnologie übermittelten Informationen werden letztendlich vom Steuerungssystem des Roboters ausgeführt. Der Roboter wechselt entsprechend den Absichten des Bedieners zwischen verschiedenen Aufgabenmodi und arbeitet so in verschiedenen Phasen zusammen.
Umgeschriebener Inhalt: Feedback und Synchronisierung: Der letzte Schritt im technischen Anzeigepfad umfasst Feedback und Synchronisierung. Sobald der Roboter die entsprechende Aktion ausführt, können Feedbackinformationen an den Bediener weitergeleitet werden, um sicherzustellen, dass der Bediener das Verhalten und den Status des Roboters versteht. Dadurch können Bediener ihre Absichtskommunikation weiter anpassen, was zu einer besseren Mensch-Maschine-Zusammenarbeit führt
Jeder Aspekt der holografischen WIMI-Technologie erfordert eine Definition der Arbeitsteilung und Implementierung, um einen effizienten und präzisen kollaborativen Betrieb zwischen Mensch und Maschine sicherzustellen. Die erfolgreiche Entwicklung dieser innovativen Technologie hat der modernen Fertigung neue Möglichkeiten eröffnet, die die Produktionseffizienz verbessern, die Belastung des Bedieners verringern und eine positive Rolle in kleinen und mittleren Unternehmen spielen werden
Offensichtlich hat die „auf Gehirn-Computer-Schnittstellen basierende Montage- und handgeführte Steuerungstechnologie“ von WIMI Hologram beispiellose Möglichkeiten für kleine und mittlere Unternehmen eröffnet. Durch die Kombination von Gehirn-Computer-Schnittstellentechnologie und handgeführter Steuerungstechnologie können Betreiber dies tun Verbessern Sie die Effizienz und Qualität des Produktionsprozesses erheblich, reduzieren Sie die Belastung des Bedieners und verringern Sie die Fehlerquote, was eine neue Stufe in der modernen Fertigung markiert.
Das obige ist der detaillierte Inhalt vonRealisierung der Mensch-Maschine-Zusammenarbeit in der Produktionsmontage: WIMI holografische Entwicklungsmontage und handgeführte Steuerungstechnologie basierend auf einer Gehirn-Computer-Schnittstelle. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Monkey lernt, mit Gedanken zu tippen, Musks neueste Demonstration der Gehirn-Computer-Schnittstelle, die voraussichtlich innerhalb von sechs Monaten an Menschen getestet wird
- ChatGPT verbindet die Gehirn-Computer-Schnittstelle und nutzt Gehirnwellen, um auf E-Mails zu antworten. Science-Fiction ist wahr geworden.
- Gehirn-Computer-Schnittstelle steht im Vordergrund, ist es ein Hype-Konzept? Oder stimmt das wirklich?
- Das Gehirn-Computer-Schnittstellenunternehmen Neuralink beginnt mit der Rekrutierung von Patienten für klinische Studien und wird Studien am Menschen durchführen
- Der „Vater der Gehirn-Computer-Schnittstelle' erscheint in Xuhui!