
Heim >Technologie-Peripheriegeräte >KI >Von Schildkröten inspirierte Roboter, die an der University of California entwickelt wurden, könnten für zukünftige Weltraumforschungen eingesetzt werden
Von Schildkröten inspirierte Roboter, die an der University of California entwickelt wurden, könnten für zukünftige Weltraumforschungen eingesetzt werden

- PHPznach vorne
- 2023-09-18 20:57:06722Durchsuche
Wie sieht ein Roboter aus, der frei unter der Erde pendeln kann?

Tut mir leid, dass ich es verlegt habe, aber das ist es auch schon.

Das Erscheinungsbild ist weder glatt noch weich, aber es soll die erste Maschine sein, die unter mehr als zehn Zentimetern Sand „schwimmen“ kann.
Die beiden Arme bewegten sich sehr schnell.
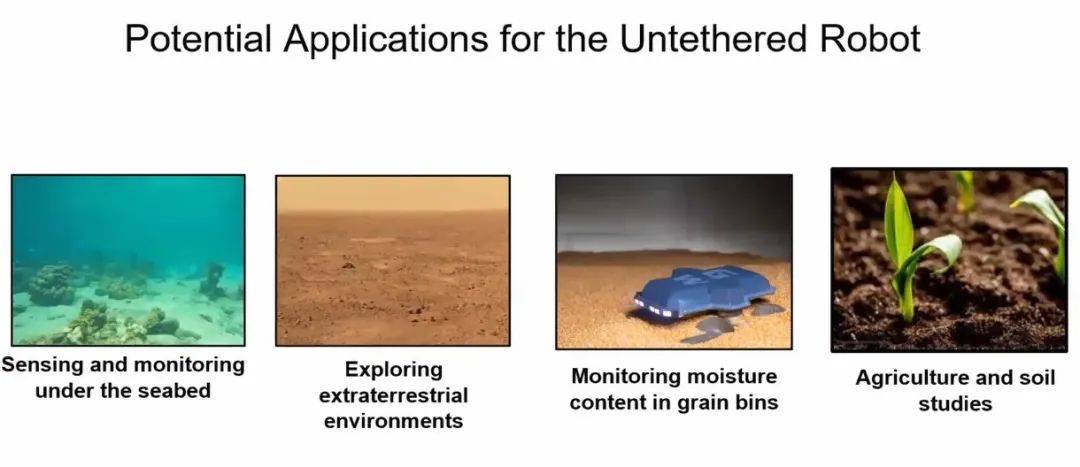
Natürlich dient „Wandering in the Sand“ nicht nur der Demonstration von Fähigkeiten. Dieser Roboter kann über WLAN gesteuert werden und kann in Bereichen wie Umweltüberwachung, Getreidespeicherinspektion und Katastrophenhilfe eingesetzt werden.

Dies ist das Ergebnis mehrerer Experimente, die von einem Team von Robotikexperten der University of California in San Diego durchgeführt wurden, und eröffnet auch eine neue Idee für die Erforschung von Untergrundrobotern.
▍Wie „schwimmt“ man unter dem Sand?
Wie schwimmt dieser Roboter, der weder weich noch glatt ist, unter der Erde?
Sie müssen wissen, dass das Schwimmen im Sand einen viel größeren Widerstand hat als das Schwimmen auf dem Boden oder im Wasser und dass es dabei sehr leicht zu Schäden kommt. Dies ist einer der Hauptgründe, warum Roboter die Umwelt unter uns nie erobert haben.
Zu diesem Zweck begannen Forscher, nach Inspiration bei Lebewesen in der Natur zu suchen.

Das erste, was mir in den Sinn kommt, sind Babyschildkröten. Wenn Babyschildkröten aus im Boden vergrabenen Eiern schlüpfen, kriechen sie im Sand und benutzen ihre kräftigen Füße als Paddel.
Als Inspirationsquelle imitieren die beiden Arme des Roboters auch die übergroßen Flossen einer kleinen Meeresschildkröte.
Wenn sich der Roboter unter dem Sand bewegt, zieht er seine Arme nach vorne, nah am Körper, und zieht sie dann wieder zur Seite, genau wie ein Schwimmer
Die Forscher stellten jedoch bald fest, dass sich der Roboter aufgrund des Widerstands des Sandes auf natürliche Weise nach oben bewegte, wenn er weiterhin seine Arme drehte und sich vorwärts bewegte, was seinen Einsatz einschränkte.
Also haben sie das Kopfdesign des „Turtle“ flexibel geändert und ihn in einen keilförmigen Kopf gestaltet, um den Luftwiderstand zu reduzieren
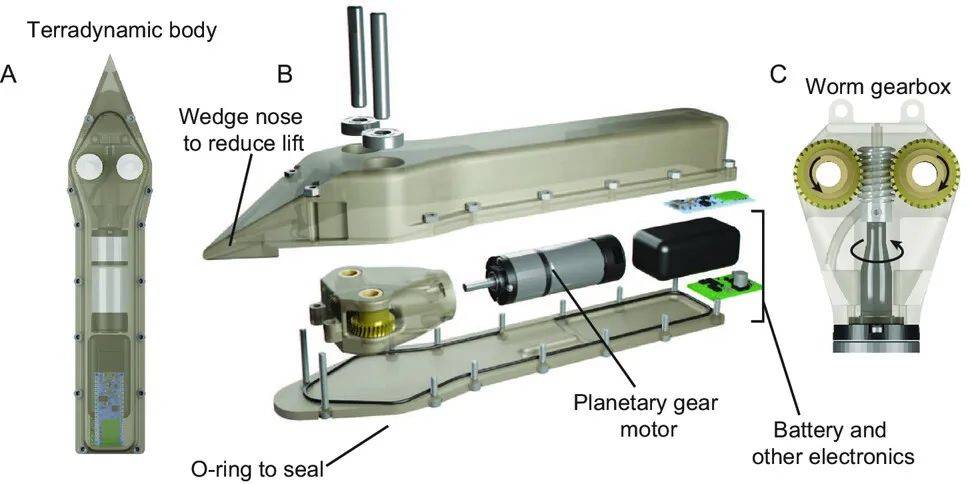
Außerdem ist dieses Gerät mit einer Reihe „folienartiger Oberflächen“ ausgestattet, die auf beiden Seiten der Nase des Roboters installiert sind. Es wirkt wie das Tauchflugzeug eines U-Bootes und drückt den Roboter nach unten, um seine Aufwärtsflugbahn auszugleichen.

Zusätzlich zur horizontalen Vorwärtsbewegung kann der Roboter im Sand auch nach links und rechts drehen. Er kann über WLAN ferngesteuert werden, um nach links oder rechts zu drehen, indem die Schubkraft seines Anbaugeräts unabhängig geändert wird. Während die Fußstützen derzeit einen festen Winkel haben, könnten sie in Zukunft so eingestellt werden, dass sich der Roboter je nach Bedarf auf und ab bewegen kann.
▍Was sollten Sie tun, wenn Sie auf Hindernisse stoßen?
Das Umzugsproblem ist gelöst, aber was sollen wir tun, wenn wir auf Hindernisse stoßen?
Tatsächlich haben die beiden Arme des Roboters neben dem Schwimmen auch die Funktion, Hindernisse zu erkennen. Dies geschieht, indem sie den zunehmenden Widerstand des umgebenden Treibsands während der Bewegung wahrnehmen. Wenn es ein Hindernis erkennt, ergreift es geeignete Maßnahmen, um eine Kollision zu vermeiden oder das Hindernis zu umgehen.
Allerdings kann er derzeit nur Hindernisse auf beiden Seiten und über dem Roboter erkennen. Was die Vorder- und Unterseite betrifft, arbeiten die Entwickler noch kontinuierlich an Verbesserungen. Zukünftige Versionen der „Little Turtle“ verfügen möglicherweise über leistungsfähigere Fähigkeiten zur Hinderniserkennung und Hindernisvermeidung.
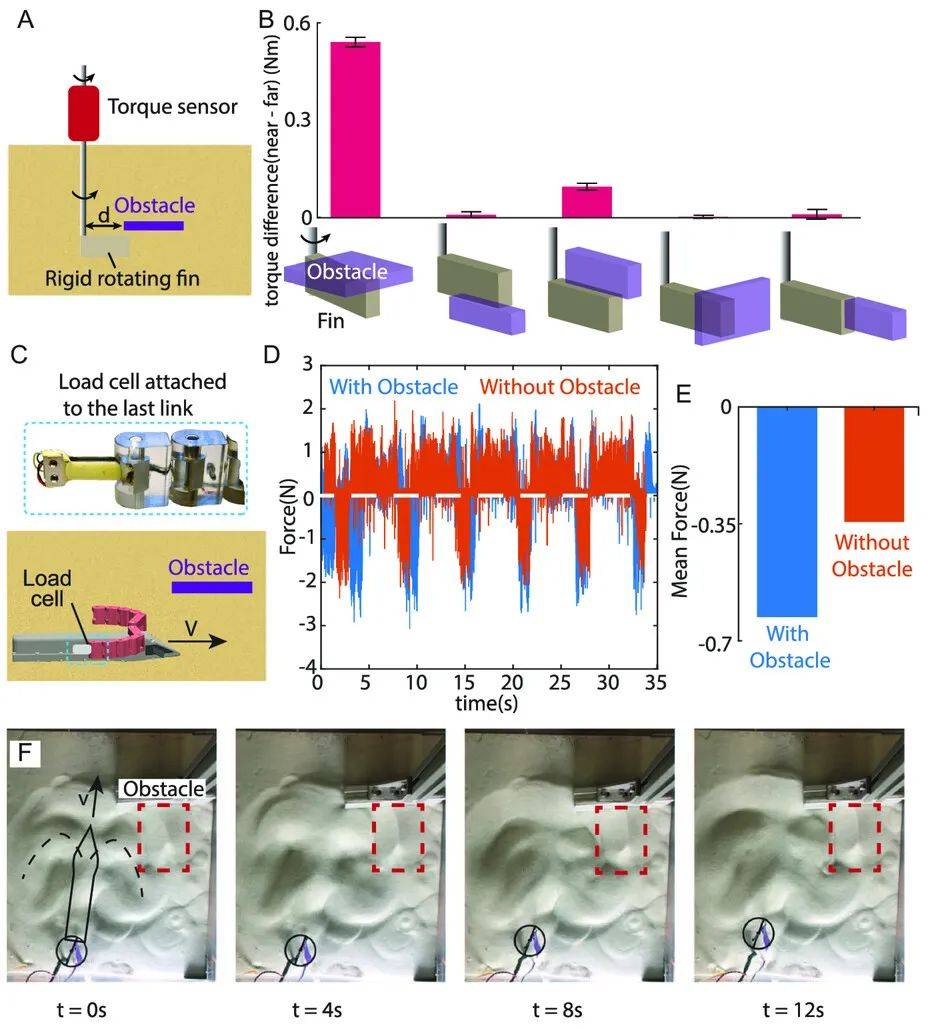
Aktuell kann sich der Roboter „Little Turtle“ mit einer Geschwindigkeit von etwa 4 Metern pro Stunde in einer Tiefe von 12,7 Zentimetern horizontal auf dem Sand bewegen. Allerdings ist seine Geschwindigkeit sehr langsam, ähnlich der Bewegungsgeschwindigkeit anderer unterirdischer Tiere wie Würmer und Muscheln.
Obwohl diese Geschwindigkeit relativ langsam ist, kann sie für einige Aufgaben ausreichend sein, insbesondere wenn vorsichtige Bewegungen erforderlich sind, um eine Beschädigung der Umgebung oder der Sensorausrüstung zu vermeiden.
Die Entwicklung eines solchen Roboters steht vor vielen technischen Herausforderungen, darunter mechanisches Design, Sensorik, Steuerungssysteme und Softwareentwicklung. Mit der kontinuierlichen Weiterentwicklung der Technologie wird die Möglichkeit, dass Roboter Aufgaben in verschiedenen komplexen Umgebungen ausführen, weiter zunehmen
▍Verbessert die Geschwindigkeit weiter und kann in Zukunft im Weltraum eingesetzt werden
Derzeit wissen die Menschen nicht genug darüber, wie sich Roboter mit Gliedmaßen unter der Erde bewegen. Kleine Roboter wie dieser eröffnen nicht nur neue Ideen für das Design von Untergrundrobotern, sondern können auch in vielen Szenarien eingesetzt werden, beispielsweise bei der Bodenprobenahme und der Untergrunderkundung . , Such- und Rettungsarbeiten usw.
Diese Forschung wurde in Advanced Intelligent Systems mit dem Titel „Toward Robotic Sensing and Swimming in Granular Environments using Underactuated Appendages“ veröffentlicht.
Der Roboter wurde in einem mit Sand gefüllten Tank im Labor und im Sand eines Küstenstrandes in La Jolla, Kalifornien, getestet. Künftig werden Forscher seine Schwimmgeschwindigkeit im Sand weiter optimieren und den Winkel seines Körpers vergrößern, damit er sich rundum unter der Erde vorwärts, rückwärts, links und rechts, auf und ab bewegen kann
In Zukunft könnte der Einsatz von Robotern neue Wege für die Weltraumforschung eröffnen. Dies liegt daran, dass Roboter nicht nur verschiedene Aufgaben im Weltraum ausführen können, sondern sich auch im Medium immobilisieren können, was in der Umgebung mit geringer Schwerkraft im Weltraum sinnvoll ist. Daher haben Roboter großes Potenzial für Weltraumanwendungen
Das obige ist der detaillierte Inhalt vonVon Schildkröten inspirierte Roboter, die an der University of California entwickelt wurden, könnten für zukünftige Weltraumforschungen eingesetzt werden. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!