
Heim >Technologie-Peripheriegeräte >KI >Ausführliche Erläuterung der Hindernisvermeidung, Pfadplanung und Steuerungstechnik für autonome Fahrzeuge
Ausführliche Erläuterung der Hindernisvermeidung, Pfadplanung und Steuerungstechnik für autonome Fahrzeuge

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-08-05 13:57:063068Durchsuche
1 Einleitung
Intelligente Transportsysteme lösen anspruchsvolle Autonomie- und Sicherheitsprobleme in komplexen Umgebungen und ziehen daher besondere Aufmerksamkeit von Forschern auf sich. Die Hauptmodule des autonomen Fahrzeugkonzepts sind Wahrnehmung, Planung und Steuerung.
Eigentlich besteht Wahrnehmung aus der Modellierung und Lokalisierung der Umgebung. Sie sind auf externe bzw. Körpersensoren angewiesen. Als nächstes zielt die Planung darauf ab, auf der Grundlage der durch die Sensorergebnisse übermittelten Informationen eine optimale Flugbahn zu generieren, um ein bestimmtes Ziel zu erreichen. Schließlich dient das Steuermodul dazu, die erzeugte Flugbahn zu verfolgen, indem es die Aktuatoren des Fahrzeugs anweist.
In diesem Artikel wird jedes Modul des Prozesses für die spezifische Situation der Vermeidung von Hindernissen vorgestellt. Die Integration dieser Aufgaben in eine globale Architektur ist der Hauptbeitrag dieser Arbeit. Das Wahrnehmungsmodul stellt sicher, dass die Umgebung anhand einer genauen Rasterdarstellung beschrieben wird. Die Verwendung von Occupancy Grid Maps (OGM) ist besonders praktisch für die Vermeidung von Hindernissen, da sie befahrbare Räume identifizieren und statische und dynamische Objekte in der Szene lokalisieren können. Die Pose des zu meidenden Objekts wird dann auf der Ebene der Pfadplanung verwendet, die auf der Grundlage der in [1] gezeigten sigmoidparametrisierten Funktion und des Rollhorizonts Trajektorien und Geschwindigkeitsprofile generiert. Das erhaltene Krümmungsprofil wird als Referenzpfad zur Führung des Steuermoduls betrachtet. Diese Ebene stellt dem Fahrzeug den passenden Lenkwinkel zur Verfügung, basierend auf einem Querführungsregler, der den Aufprallpunkt (CoP) anstelle des klassischen Schwerpunkts nutzt. Der vorgeschlagene Controller basiert auf Feedforward- und robusten Zustandsrückkopplungsaktionen, um die Auswirkungen von Störungen auf laterale Fehler zu reduzieren bzw. laterale Stabilität sicherzustellen [2].
Das Papier ist wie folgt aufgebaut: Teil II stellt den globalen Ansatz vor, der die verschiedenen Module enthält, die zur Hindernisvermeidung implementiert werden. Im dritten Teil wird die dynamische Objekterkennungsmethode basierend auf der Belegung des Vertrauensgitters vorgestellt. Abschnitt 4 erläutert den Hindernisvermeidungsalgorithmus basierend auf der parametrisierten Sigmoidfunktion und dem Rollhorizont. Abschnitt 5 beschreibt detailliert den Controller-Entwurf, der auf der Feedforward-Kopplung und der robusten Zustandsrückmeldung basiert. Abschnitt 6 beschreibt die experimentelle Plattform und die Ergebnisse dieser experimentellen Methode. Abschließend schließt Abschnitt 7 das Papier ab.
2 Strategie zur Hindernisvermeidung
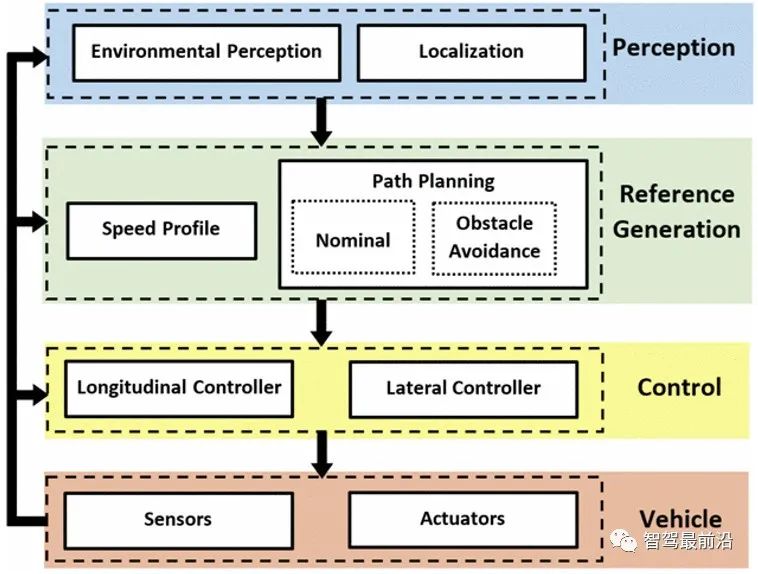
In diesem Abschnitt wird der Titel der globalen Strategie zur Hindernisvermeidung vorgestellt, die auf drei Modulen basiert, wie in Abbildung 1 dargestellt. In diesem Abschnitt werden die einzelnen Ebenen kurz vorgestellt.
 Bilder
Bilder
Abbildung 1 Hindernisvermeidungsstrategie
A. Wahrnehmungsmodul
Die richtige und effektive Wahrnehmung der Umgebung ist für autonome Fahrzeuge zwingend erforderlich. Diese Forschung konzentriert sich hauptsächlich auf die Umgebungswahrnehmung, um die Standorte von statischen/dynamischen Objekten und befahrbaren Pfaden auf der Grundlage externer Sensorsensoren zu ermitteln. Die im Positionierungsteil nicht berücksichtigte Position des Fahrzeugs gilt als bekannt und zuverlässig. Eine der gebräuchlichsten Methoden zum Extrahieren von Informationen über Straßen und umliegende Objekte ist das „Occupancy Grid“ (OG). Es kann in einer Vielzahl von Anwendungen wie Kollisionsvermeidung, Sensorfusion, Zielverfolgung und simultaner Lokalisierung und Kartierung (SLAM) eingesetzt werden [3]. Die Grundidee von OG besteht darin, den Umgebungsgraphen als gleichmäßig verteilte Felder binärer Zufallsvariablen darzustellen, wobei jede Variable darstellt, ob sich an dieser Stelle in der Umgebung ein Hindernis befindet [4]. Es kann aus vielen Formen generiert werden, um verrauschte und unsichere Sensormessungen bei bekannter Fahrzeuglage zu verarbeiten. In diesem Artikel wird OG durch die von Dempster und Shafer [5][6] vorgeschlagene Glaubenstheorie definiert, da sie Unsicherheit, Ungenauigkeit und unbekannte Teile modelliert und auch die Bewältigung von Konflikten bei der Datenfusion ermöglicht. Teil 3 enthält weitere Einzelheiten.
B. Referenztrajektorien-Generierungsmodul
Dieses Modul dient der Definition der Trajektorie und der entsprechenden Geschwindigkeitskurve, der das Fahrzeug folgen soll. Vom Wahrnehmungsmodul erhält der Planer die befahrbare Fläche und die Hindernisstandorte. Basierend auf diesen Informationen können geometrische Trajektorien und Geschwindigkeitskurven generiert werden. Dieser Artikel konzentriert sich auf Pfadplanungsstrategien. Ziel dieses Abschnitts ist es, eine nominelle Flugbahn von einem Startpunkt zu einem Endpunkt basierend auf der wahrgenommenen befahrbaren Fläche bereitzustellen.
Wenn ein Hindernis erkannt wird, wird die zweite Flugbahn (Hindernisvermeidungsbahn) berechnet, um die Sicherheit und den Komfort der Passagiere des autonomen Fahrzeugs zu gewährleisten, und nach der Vermeidung zur nominalen Flugbahn addiert. Diese Ausweichtrajektorie kann durch lokale Planung ermittelt werden, da sie nur einen kleinen Teil der Nominaltrajektorie umfasst. Um den Rechenaufwand des Trajektorienerzeugungsalgorithmus zu reduzieren, wird die Rolling-Horizont-Methode übernommen, wie in [1] beschrieben, deren Arbeit in diesem Artikel erweitert wird, siehe Abschnitt IV. Diese Trajektorien (Soll- und Hindernisvermeidung) können dann als Referenzen für Steuermodule (hauptsächlich Querregler) betrachtet werden.
C. Steuermodul
Das Steuermodul besteht aus zwei Hauptteilen: Längs- und Querreglern, die eine automatische Fahrsteuerung gewährleisten. Das Hauptaugenmerk liegt dabei auf seitlichen Steuerungen zur Vermeidung von Hindernissen. Tatsächlich wird vom Querregler der geeignete Lenkwinkel bereitgestellt, um dem vom Referenzgenerierungsmodul vorgegebenen gewünschten Weg zu folgen. Die Verfolgung des gewünschten Pfads kann durch die Reduzierung zweier Verfolgungsfehler erreicht werden, nämlich des Querfehlers und des Kursfehlers. Unter den in der Literatur vorhandenen geometrischen und dynamischen Querführungsstrategien [7] wird hier ein dynamischer Ansatz basierend auf dem Center of Collision (CoP) übernommen [8]. Die Wahl hängt von der Leistung dieser Steuerungsmethode ab. Der CoP ist ein geometrischer Punkt vor dem Schwerpunkt (CoG) des Fahrzeugs, der seitliche Positionsfehler vorhersagt. Man kann dann eine bessere Flugbahnverfolgung erwarten. Da andererseits die Bewegung des CoP von der Seitenkraft des Hinterreifens entkoppelt ist [9], wie in Abschnitt V gezeigt, wird die Querdynamikgleichung weniger komplex.
2 Dynamische Hinderniserkennung basierend auf einem dynamischen Gitter
OG ist eine Darstellung, die den Raum mehrdimensional in Einheiten unterteilt, und jede Einheit speichert das Wissen über ihren Belegungsstatus [4]. Heutzutage wird OG stark genutzt, da leistungsfähigere Ressourcen zur Bewältigung der Rechenkomplexität zur Verfügung stehen. Die Konstruktion von Netzen wurde in mehreren Dimensionen (2D, 2,5D und 3D) angewendet [10], wobei jeder Zellzustand gemäß einer ausgewählten Form beschrieben wird. Am gebräuchlichsten ist das Bayesianische Framework, das zuerst von Elfes [4] übernommen wurde und später viele Erweiterungen erfuhr, um zum berühmten Bayesian Occupancy Filter (BOF) zu werden [11]. Andere Arbeiten schlagen einen Formalismus vor, der auf der Dempster-Shafer-Theorie, auch bekannt als Evidenztheorie, basiert und im Folgenden beschrieben wird.
A. Mithilfe der Glaubenstheorie
Auf die Wahrscheinlichkeitstheorie reduziert, liefert die Glaubenstheorie eine adäquate Darstellung von Daten- und Quellendefekten und ist daher für die Wahrnehmung in ITS geeignet. Es bietet eine breite Palette von Fusionsoperatoren, die diese Eigenschaften je nach Anwendung verarbeiten können. Einige Untersuchungen zum Aufbau von OG mithilfe des Belief-Frameworks finden sich in [12], [13]. Diese Arbeit geht auf die Forschung von [13] zurück, die eine Methode zur Erkennung bewegter Objekte und zur Bestimmung des befahrbaren Raums basierend auf den resultierenden Konflikten vorschlug. Zu diesem Zweck wird ein Identifikationsrahmen definiert, der den Status einer Zelle enthält, die als frei (F) oder belegt (O) gilt. Das Identifikationsfeld ist Ω={F, O}. Das Referenzleistungsmengengerüst enthält alle möglichen Kombinationen der folgenden Annahmen: 2Ω= {∅,F,O,{F,O}}. Um den Glauben an jeden Zustand auszudrücken, repräsentiert die Massenfunktion m(.) den Konflikt m(∅), den freien Zustand m(F), den besetzten Zustand m(O) und den unbekannten Zustand m({F,O }) jeweils.
B. Sensormodell
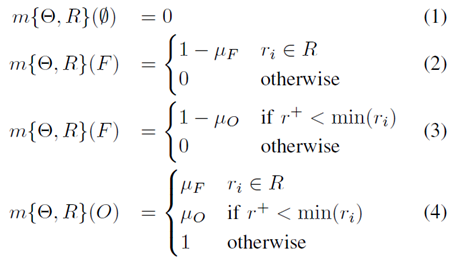
Im Grunde ist das Sensormodell die Art und Weise, wie die Qualitätsfunktion des Zustands entsprechend der Metrik berechnet wird. In unserer Anwendung kommt als Sensor ein 3D-Multiecho-LIDAR zum Einsatz (siehe Abschnitt VI). Die Eingabedaten umfassen einen Bereich ri basierend auf einem Punkt pi und einem Winkel θi. Aus diesem Datensatz wird ein Scanning Grid (SG) in Polarkoordinaten erstellt. Jede Reihe von SG entspricht einem Winkelsektor Θ=[θ-, θ+], der in RxΘ definiert ist. Der Bereich der Zelle ist R=[r-,r+], was bedeutet, dass jede Zelle durch ein Massenpaar m{Θ,R} definiert ist. Die Masse A∈Ω, die jeder Aussage entspricht, finden Sie hier [13]:
 Bild
Bild
wobei μF und μO der Wahrscheinlichkeit eines Fehlalarms bzw. einer verpassten Erkennung des Sensors entsprechen. Der Einfachheit halber werden diese Massenfunktionen m(O), m(F) und m(Θ) dargestellt.
 Bilder
Bilder
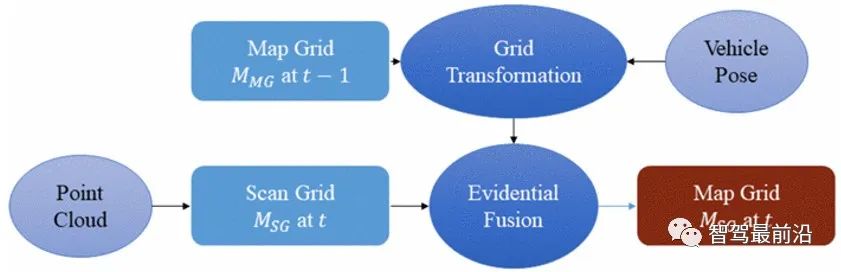
Abbildung 2 Aufbau des Kartengitters (MG)
Abbildung 2 zeigt den Prozess des Aufbaus und der Aktualisierung des MG unter Verwendung der zum Zeitpunkt t bereitgestellten Sensorpunktwolke. Dieses Update basiert auf der Multi-Grid-Evidence-Fusion. Dies ist der interessanteste Teil des Prozesses, da er Zeit für die Aktualisierung des Kartenrasters und die Bewertung des Einheitenstatus bietet. Unter den verschiedenen Operatoren der Glaubenstheorie wird die Dempster-Shafer-Kombinationsregel verwendet:

wobei mmG,t und mmG,t-1 die Qualität des Kartengitters bzw. des gescannten Gitters zum Zeitpunkt t darstellen . Der Operator ist wie folgt definiert:

wobei
das Ergebnis mMG,t(A) erzeugt, das den Zustand jeder Zelle definiert, der vom vorherigen Zustand und der neuen Metrik abhängt. Die pro Bundesstaat produzierte Masse stellt sich wie folgt dar [13]:
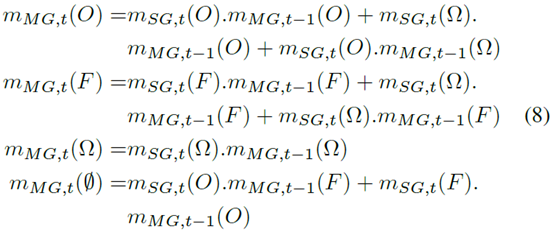
Grundsätzlich zeigt diese Eigenschaft die Dissonanz zwischen t-1 und t. Inkonsistenzen treten auf, wenn eine Einheit von „Frei“ in „Besetzt“ wechselt oder umgekehrt. Daher kann die Erkennung von Konflikten zur Auswertung dynamischer Zellen führen. Konflikte ermöglichen das Markieren besetzter Zellen, die ihren Zustand basierend auf zwei Konflikttypen ändern:

wobei

Der Fusionsprozess normalisiert die Zustandsqualität durch den Gesamtkonflikt, aber erwägen Sie, diese Informationen zum Markieren zu verwenden mobile Einheit, die das dynamische Objekt definiert. Jede erkannte Pose wird dann als Eingabe für die Trajektoriengenerierung im nächsten Abschnitt verwendet.
4 Trajektoriengenerierung
Dieser Abschnitt ist der Pfadplanung gewidmet, d. h. der Erstellung einer geometrischen Trajektorie (die den Koordinatenpunkten folgt) Ai(xi,yi). Da es in dieser Arbeit darum geht, die Machbarkeit der vorgeschlagenen Vermeidungsarchitektur zu überprüfen, werden die Geschwindigkeitskurve und die damit verbundene Längssteuerung nicht berücksichtigt. Wie in Abschnitt 2 erwähnt, verfolgt das Pfadplanungsmodul zwei Ziele: die Generierung einer globalen Soll-Trajektorie basierend auf den Ursprungs- und Ankunftspunkten und die Generierung einer lokalen Trajektorie, um die Erkennung von Hindernissen zu vermeiden. Dabei steht die Generierung von Ausweichtrajektorien im Vordergrund. Diese Ausweichbahn muss den Sicherheitsstandards entsprechen, insbesondere die Längs- und Querabstände zu Hindernissen. Diese Abstände können gleich sein, wodurch eine kreisförmige Sicherheitszone um das Hindernis entsteht, wie kürzlich in [1] vorgeschlagen. Dieses Papier schlägt eine Verallgemeinerung der Methode vor, indem die Gesamtsituation betrachtet wird, in der horizontale und vertikale Sicherheitsstandards unterschiedlich sind.
Um die geometrische Form der Trajektorie zu erhalten, gibt es mehrere mathematische Methoden, die auf Funktionen wie Klothoidenkurven, Bezierkurven oder Splines basieren [14], [15]. Eine ausführliche Übersicht über alle diese geometrischen Methoden findet sich in [16]. Diese Methoden weisen interessante Eigenschaften auf (Glätte, Auswahl der besten Flugbahn aus einer Reihe von Kandidaten usw.), können jedoch rechenintensiv sein. Unter diesen stellt die Sigmoidfunktion einen fairen Kompromiss zwischen Glätte und Rechenaufwand dar. Der betrachtete Ansatz empfiehlt die Verwendung dieser mathematischen Methode in Verbindung mit einem nativen Horizon-Scheduler, um den Rechenaufwand zu reduzieren. Die Vorteile dieses Planungsansatzes werden ausführlich in [1] diskutiert. Dieser lokale Planer berücksichtigt Informationen über erkannte Hindernisse aus dem Belegungsnetz, um geeignete sanfte Ausweichmanöver zu definieren und zur Soll-Flugbahn zurückzukehren.
A. Geometrische Vermeidung
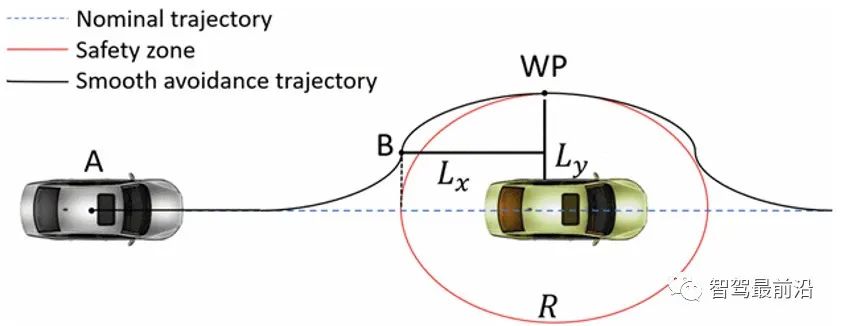
Abbildung 3 zeigt verschiedene Flugbahnen: nominale Flugbahn, sichere Zone und endgültige glatte Vermeidungsflugbahn. Die Definition der sicheren Zone R ist der erste Schritt nach der Erkennung eines Hindernisses. Dieser Bereich ist nicht befahrbar, um Kollisionen aufgrund der Nähe zu Hindernissen zu vermeiden. Die große Halbachse und die kleine Halbachse der Lx- bzw. Ly-Ellipse sind die Sicherheitskriterien, die den Bereich definieren. Nach der Definition können Vermeidungstrajektorien entworfen werden. Um den Fahrgastkomfort zu gewährleisten, wurden Merkmale in Anlehnung an die S-Form gewählt. In Abbildung 3 bezieht sich A auf den Startpunkt (also den Schwerpunkt des Ego-Fahrzeugs), B auf den Knickpunkt des Sigmoids und WP auf den zu erreichenden Startpunkt. Die Glätte C() kann so angepasst werden, dass die vermiedene Flugbahn als

definiert werden kann. Um einen Algorithmus zu erhalten, der robust ist, wenn sich Hindernisse bewegen, wird der gesamte Vorgang für jede horizontale Vektorprobe wiederholt (Identifizierung des sicheren Bereichs). und Berechnen von Wegpunkten basierend auf der Sigmoidfunktion).
 Bilder
Bilder
Abbildung 3 Trajektorienplanung
B. Horizontale Planung
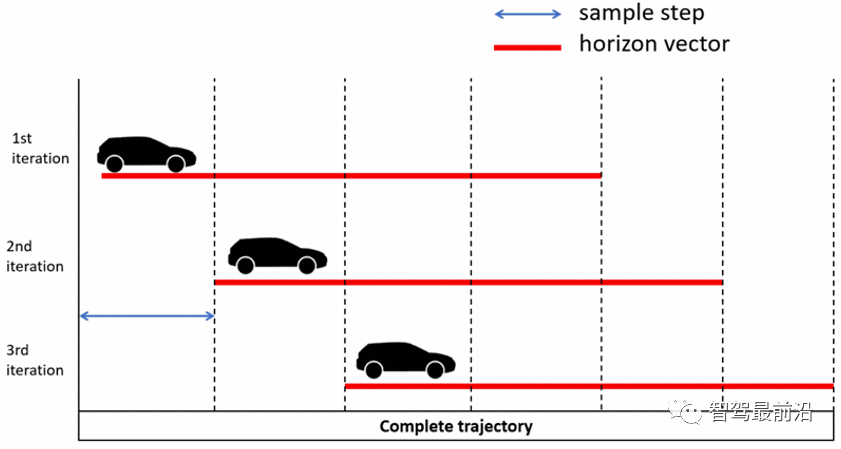
Um den Rechenaufwand des Algorithmus zu reduzieren, wird ein lokaler Planer verwendet. Es folgt nicht der gesamten Hindernisvermeidungsbahn, sondern ist in mehrere Teile unterteilt. Lokale Trajektorien werden bei jeder Stichprobe auf dieser diskreten Ebene berechnet, was den Rechenaufwand senkt und den Algorithmus robust gegenüber dynamischen Hindernissen macht. Zwei Parameter können parametrisiert werden: Probengröße und horizontale Länge. Letzteres hängt von den ausgestatteten Wahrnehmungssensoren (Hardwareeinschränkungen) und der Fahrzeuggeschwindigkeit (Rollhorizont) ab. Beispielschritte stellen die Unterteilung der Trajektorie in lokale Segmente dar. Das gesamte Prinzip ist in Abbildung 4 zusammengefasst.
 Bilder
Bilder
Bild 4 Horizontplanung
Wenn das Fahrzeug den nächsten Abtastschritt erreicht, wird der lokale Horizont erneut berechnet. Wie man sehen kann, gibt es einen gemeinsamen Teil zwischen den beiden Iterationen, der es dem Algorithmus ermöglicht, mit dynamischen Hindernissen umzugehen. Wie im diskreten Zeitbereich erfordert die Wahl der Stichprobengröße einen Kompromiss zwischen Genauigkeit und Rechenaufwand. Der Algorithmus iteriert, bis der Horizontvektor das Ende der gesamten Flugbahn erreicht, d. h. wenn die Wahrnehmungssensoren alle Unterteilungen der Flugbahn abdecken. Diese geometrische Flugbahn ist die Eingabe für die Leitsteuerungsstufe.
5 Controller-Design
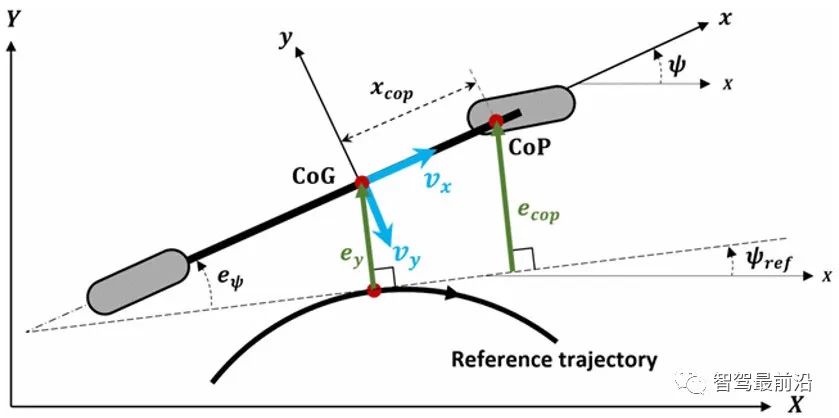
In diesem Abschnitt wird das laterale Controller-Design vorgestellt, das im in Abbildung 1 gezeigten Steuermodul verwendet wird. Die seitliche Führung zielt darauf ab, zwei Arten von Fehlern zu reduzieren, nämlich den seitlichen Fehler, den Abstand zwischen dem Schwerpunkt des Fahrzeugs und der Referenztrajektorie, und den Kursfehler, den Abstand zwischen der Längsachse des Fahrzeugs und der Referenztrajektorie, wie in Abbildung 5 dargestellt:
 Bild
Bild
Abbildung 5 Seiten- und Kursfehler
Hier wird anstelle des klassischen CoG-Seitenfehlers ey empfohlen, den Seitenfehler zu verwenden, wenn der CoP als [9] definiert ist:

zwischen CoP und CoG Der Abstand xcop hängt nur von der Fahrzeugkonfiguration ab:

wobei m und Iz die Fahrzeugmasse und Gierträgheit sind und lf der Abstand zwischen CoG und Vorderachse ist. Aus (12) ist ersichtlich, dass der CoP-Lateralfehler ecop höher ist als der Lateralfehler ey in Abbildung 5. Dadurch sind laterale Positionsfehler zu erwarten und eine bessere Trajektorienverfolgung zu erwarten. Im Gegensatz zu klassischen Steuerungen basierend auf dem CoG (Center of Gravity) wird hier der Center of Impact (CoP) als geometrischer Punkt am Fahrzeug genutzt. Der Hauptvorteil des CoP ist die reduzierte Komplexität der Querdynamikgleichungen, da die Seitenkräfte des Hinterreifens keinen Einfluss auf die Bewegung des CoP haben [9].
Basierend auf dem planaren Fahrradmodell [17] und unter Verwendung der Trackingfehler (11) und (12) lautet das Trackingfehlermodell, das zum Entwurf des CoP-Lateralnavigationscontrollers verwendet wird:

wobei der Zustandsvektor  , δf ist der Vorderraddrehwinkel,
, δf ist der Vorderraddrehwinkel,  da der Störungsterm die erwartete Gierwinkelgeschwindigkeit und Gierwinkelbeschleunigung umfasst.
da der Störungsterm die erwartete Gierwinkelgeschwindigkeit und Gierwinkelbeschleunigung umfasst.
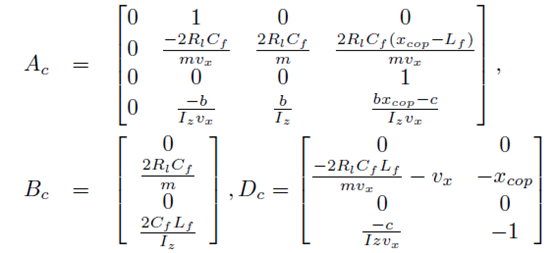 Bild
Bild



Lr ist der Abstand zwischen dem CoG und der Hinterachse, Cf und Cr sind die Kurvensteifigkeit des Vorder- und Hinterreifens. Beachten Sie, dass Cr nicht in der zweiten Zeile von Ac steht. Daher kann die Verwendung von CoP die Anzahl unsicherer Parameter reduzieren.
Der laterale Controller berechnet das entsprechende δf, um sicherzustellen, dass der Zustandsvektorfehler nahe Null konvergiert. Da außerdem die Dynamik des Tracking-Error-Modells durch wref beeinflusst wird, muss der Controller auch eine gewisse Dämpfung seines Einflusses sicherstellen. Um diese Ziele zu erreichen, wird ein lateraler Controller vorgeschlagen, der durch Feedforward mit robustem Zustandsfeedback gekoppelt ist [2]: Feedforward-Aktionen zielen darauf ab, die Auswirkungen von Vektor-Wref teilweise zu beseitigen. Der Vorteil von CoP besteht darin, dass der erhaltene Feedforward keine Kenntnis von Cr erfordert. Die Zustandsrückkopplung gewährleistet eine exponentielle Konvergenz des Fehlervektors gegen Null und dämpft den Einfluss des Vektors wref. Dieses robuste Steuerungsproblem kann mithilfe linearer Matrixungleichungen (LMI) ausgedrückt werden, wie in [2] gezeigt.
 6 Experimentelle Ergebnisse
6 Experimentelle Ergebnisse
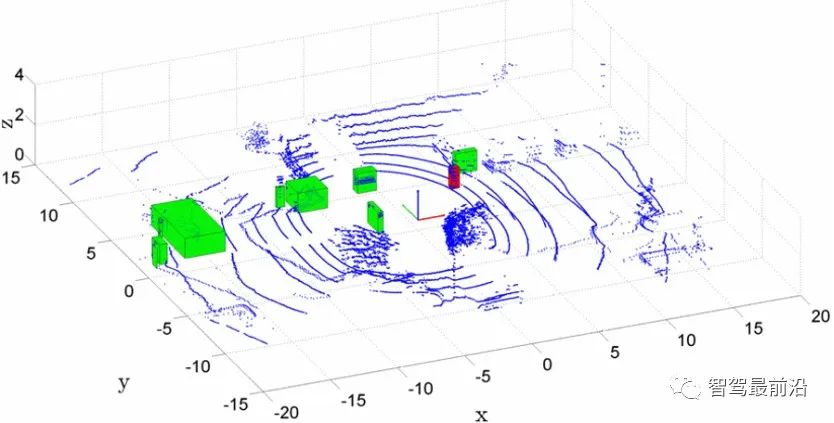
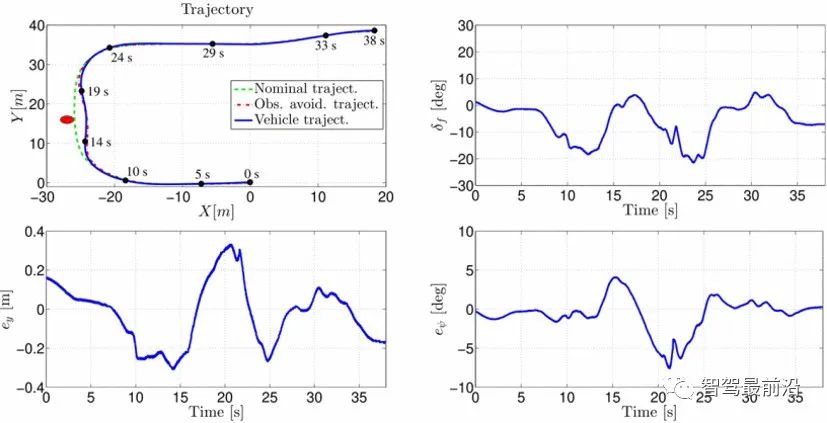
A Die experimentelle Plattform ARTEMIPS ist ein automatisches Testfahrzeug, das mit mehreren Sensoren ausgestattet ist: hochpräzise IMU (Inertial Measurement Unit) RT-3002 mit DGPS-Technologie, 2 IBEO LUX 2D 4-Schicht-Laserscanner, 2 VLP-16 Velodyne3D-Laserscanner und High-Range-Kamera MANTA-G125 (siehe Abbildung 6)). RT-3002 wird als Referenzsensor für Positions-, Geschwindigkeits-, Beschleunigungs- und Richtungsmessungen verwendet. Der LUX-Scanner dient zur Fernerkennung (in Form einer 4-schichtigen Punktwolke) an der Vorder- und Rückseite des Fahrzeugs. VLP-16 wird verwendet, um die Erfassung der Umgebung auf beiden Seiten des Fahrzeugs zu vervollständigen (sie bieten 16-schichtige Punktwolken und verfügen über eine 360°-Rundumsicht). ARTEMIPS ist außerdem mit 3 Aktuatoren und 2 integrierten Servomotoren MAC-141 zur Steuerung von Lenkrad und Bremspedal sowie einem multifunktionalen NI-Daq-System zur Navigation des Automotors ausgestattet. Alle Sensoren und Aktoren sind mit einem eingebetteten Computer verbunden, auf dem die RTMaps-Softwarelösung von Intempora läuft. Es handelt sich um eine dedizierte Plattform für Multisensor- und Multiaktorsysteme. Abbildung 6: Experimentelle Plattform ARTEMIPS und ihr Referenzrahmen Das experimentelle Protokoll wird verwendet, um die Leistung der vorgeschlagenen Architektur zu bewerten. Dieser Test wird bei einer konstanten Geschwindigkeit vx=10 km/h durchgeführt. Bilder Abbildung 7 Sequenz für den Hindernisvermeidungstest Bilder Abbildung 8 Punktwolke, Ursprungskoordinaten und Hinderniserkennung Das Experiment Die Ergebnisse sind in Abbildung 9 dargestellt . Wie Sie im Bild oben links sehen können, schneidet die Soll-Flugbahnlinie die Position des Objekts, während der resultierende rote Pfad Hindernisse umgeht. Es ist auch zu beobachten, dass die seitliche Steuerung eine gute Trajektorienverfolgung gewährleistet und die Erkennung von Hindernissen zwischen 13 und 20 Sekunden vermeidet. In diesem Zeitintervall erzeugt der Regler einen Lenkwinkel, der von positiven auf negative Werte wechselt, um Hindernissen auszuweichen und eine kleine Spurfehlersumme zu gewährleisten. Bilder Abbildung 9 Ergebnisse der Lenksteuerung Schlussfolgerung Dieses Papier schlägt ein dynamisches Hindernisvermeidungsschema vor, das auf drei Ebenen der Wahrnehmung, Wegplanung und Kontrollführung basiert. Die dynamische Hinderniserkennung erfolgt auf Basis des Belegungsrasters. Die Pfadplanung basiert auf der Sigmoïd-Funktion, um glatte Trajektorien zu generieren und das Erkennen von Hindernissen zu vermeiden. Letztendlich folgt das Fahrzeug der vom Fahrzeug generierten Referenztrajektorie durch eine auf Quersteuerung basierende Strategie im Kollisionszentrum. Experimentelle Ergebnisse an unserem Testfahrzeug zeigen, dass diese Methode zur Hindernisumgehung wirksam ist. Zukünftige Arbeiten umfassen die Betrachtung von Positionierungsstrategien und die Bewertung des Ansatzes in komplexeren Situationen. Bilder Bilder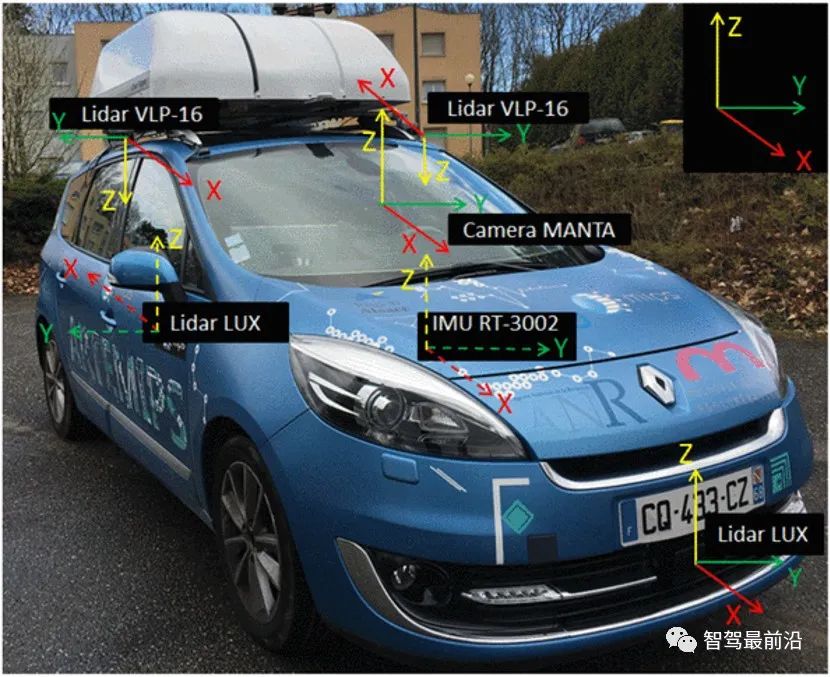 Punktwolken wurden für die Konstruktion von OG nach der in Teil III beschriebenen Methode basierend auf aufgezeichneten Datensätzen von vier Laserscannern verwendet. Abbildung 7 zeigt die umliegende Szene und die zu meidenden Objekte. Die zeitliche Fusion von OG verdeutlicht den Konflikt bei der Beschreibung dynamischer Einheiten. Zur Konstruktion dynamischer Objekte wurde ein hierarchischer Clustering-Algorithmus (aus der Statistics and Machine Learning Toolbox in MATLAB) angewendet. Sie sind in Abbildung 8 dargestellt. über 3D-Bounding-Box. Die angezeigten Koordinaten entsprechen der Fahrzeuglage basierend auf GPS-Daten. Die zu vermeidenden Objekte sind rote Objekte. Es ist zu beachten, dass aufgrund der Empfindlichkeit der Methode gegenüber Positionierungsfehlern einige fehlerhafte Erkennungsergebnisse auftreten können.
Punktwolken wurden für die Konstruktion von OG nach der in Teil III beschriebenen Methode basierend auf aufgezeichneten Datensätzen von vier Laserscannern verwendet. Abbildung 7 zeigt die umliegende Szene und die zu meidenden Objekte. Die zeitliche Fusion von OG verdeutlicht den Konflikt bei der Beschreibung dynamischer Einheiten. Zur Konstruktion dynamischer Objekte wurde ein hierarchischer Clustering-Algorithmus (aus der Statistics and Machine Learning Toolbox in MATLAB) angewendet. Sie sind in Abbildung 8 dargestellt. über 3D-Bounding-Box. Die angezeigten Koordinaten entsprechen der Fahrzeuglage basierend auf GPS-Daten. Die zu vermeidenden Objekte sind rote Objekte. Es ist zu beachten, dass aufgrund der Empfindlichkeit der Methode gegenüber Positionierungsfehlern einige fehlerhafte Erkennungsergebnisse auftreten können. 
 Referenzen
Referenzen
Bilder
Das obige ist der detaillierte Inhalt vonAusführliche Erläuterung der Hindernisvermeidung, Pfadplanung und Steuerungstechnik für autonome Fahrzeuge. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Aus welchen Schichten besteht die technische Architektur des Internets der Dinge?
- Welche Technologien werden für die App-Entwicklung benötigt?
- Worauf beziehen sich computertechnische Leistungsindikatoren hauptsächlich?
- Ein Artikel über die Anwendung der SLAM-Technologie beim autonomen Fahren
- Lassen Sie uns aus technischer Sicht darüber sprechen, warum es schwierig ist, binokulare autonome Fahrsysteme populär zu machen.