
Heim >Betrieb und Instandhaltung >Betrieb und Wartung von Linux >Kann Linux mehrere Prozesse erstellen?
Kann Linux mehrere Prozesse erstellen?

- 王林nach vorne
- 2023-05-20 18:32:461677Durchsuche
Linux kann mehrere Prozesse erstellen. Linux kann mehrere Aufgaben gleichzeitig erledigen und mehrere Prozesse unterstützen, um die Nutzung der Systemressourcen zu maximieren. Kommunikationsmethoden zwischen Linux-Prozessen: 1. Unbenannte Pipes verwenden (FIFO);
Linux kann mehrere Prozesse erstellen.
linux unterstützt mehrere Prozesse. Ein Vorteil eines Multiprozesssystems besteht darin, dass es mehrere Aufgaben gleichzeitig bearbeiten kann, um eine maximale Auslastung der Systemressourcen zu erreichen.
Kapitel 1 Einführung in Linux-Multiprozesse
1.1 Übersicht
1.1 .1 Prozesskonzept
Unter Linux wird das laufende Programm als Prozess bezeichnet.
Programm : Statisches Konzept, es ist eine kompilierte Binärdatei
Prozess : Dynamisches Konzept, wenn das Programm ausgeführt wird, wird das System automatisch Führen Sie einen entsprechenden Prozess aus
Der Prozess besteht aus drei Teilen: Prozesskontrollblock (PCB), Codesegment und Datensegment
Prozesskontrollblock: Wird in Linux verwendet. Dargestellt durch eine Struktur , Aufzeichnen der Statusinformationen des Prozesses
Zombie-Prozess : Der übergeordnete Prozess wird vor dem untergeordneten Prozess beendet
Wenn Sie einen untergeordneten Prozess erstellen, sind im übergeordneten Prozess jedoch die Ressourcen vorhanden des untergeordneten Prozesses nicht recycelt werden, wird der untergeordnete Prozess zu einem Zombie-Prozess und der Zombie-Prozess wird schließlich von einem Prozess namens INIT im System recycelt.
Der Init-Prozess (Prozess Nr. 1) ist der erste Prozess, der beim Systemstart ausgeführt wird, und der Vorgängerprozess aller Prozesse.
1.1.2 Prozessansicht-Shell-Befehl
top Dynamische Prozessinformationen anzeigen# 🎜 🎜#
ps -ef Prozessdetails anzeigen
- #🎜🎜 #pstree# 🎜🎜# Prozessinformationen in Baumform anzeigen
- Den angehaltenen Prozess im Hintergrund ausführen lassen# 🎜🎜##🎜 🎜#
1.2 Prozessausführungsstatus
#🎜 🎜##🎜🎜 #Ausführungsstatus (RUNNING): Der Prozess belegt die CPU.
Bereitschaftszustand (RUNNING): Der Prozess befindet sich in der Warteschlange und wartet auf die Planung.- Leichter Schlaf (UNTERBRUCHBAR): Zu diesem Zeitpunkt wartet der Prozess darauf, dass ein Ereignis eintritt oder eine Systemressource auf ein Signal reagiert.
- Tiefschlaf (UNUNTERBRECHENBAR): Zu diesem Zeitpunkt wartet der Prozess auf das Eintreten eines Ereignisses oder einer Systemressource und kann nicht auf das Signal reagieren.
- STOPPED: Der Prozess ist zu diesem Zeitpunkt angehalten.
- Zombie-Status (ZOMBIE): Derzeit kann der Prozess nicht geplant werden, aber die Leiterplatte wurde nicht freigegeben.
- DEAD: Dies ist ein beendeter Prozess und die Leiterplatte wird freigegeben
-
#🎜 🎜#
# 🎜🎜# 1.2.2 Benutzermodus/Kernelmodus -
Kernelmodus: auch
Kernelraum genannt, ist der Kernelprozess/ Der Bereich, in dem sich der Thread befindet gelegen. Hauptverantwortlich für die Interaktion zwischen Betriebssystem und Hardware.
Benutzerbereich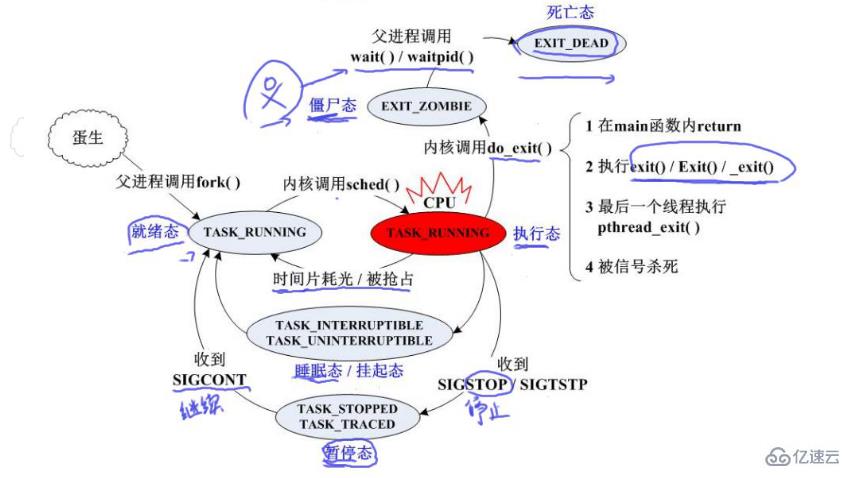 genannt, ist der Bereich, in dem sich Benutzerprozesse/-threads befinden. Wird hauptsächlich zum Ausführen von Benutzerprogrammen verwendet.
genannt, ist der Bereich, in dem sich Benutzerprozesse/-threads befinden. Wird hauptsächlich zum Ausführen von Benutzerprogrammen verwendet.
1. Unterschied
Kernelmodus: Der laufende Code unterliegt keinen Einschränkungen, und der Die CPU kann jede Anweisung ausführen. Benutzermodus:
. Der laufende Code muss zahlreichen Prüfungen durch die CPU unterzogen werden und kann nicht direkt auf Kerneldaten und -programme zugreifen, d. h. er kann nicht wie ein Kernel-Modus-Thread auf eine gültige Adresse zugreifen. 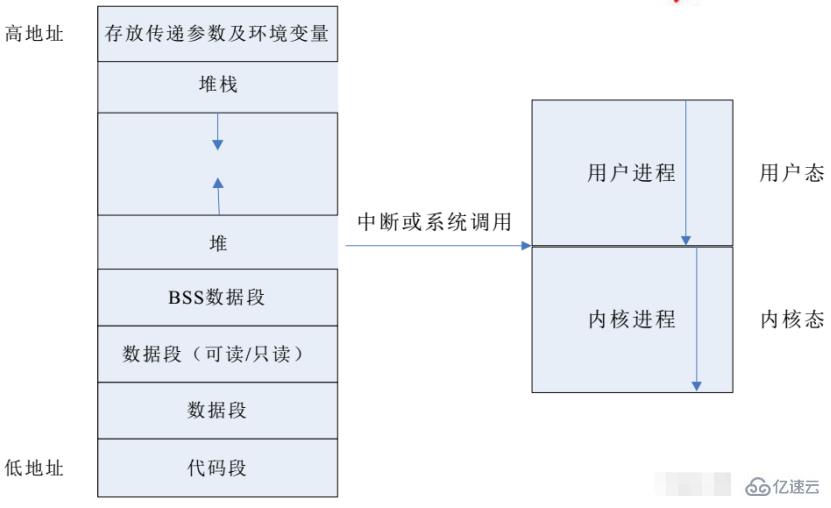
2. Gründe für die Unterscheidung zwischen Benutzermodus und Kernelmodus
, um eine zentrale Verwaltung der Ressourcen sicherzustellen und Konflikte bei der Ressourcennutzung zu reduzieren.
3. Vom Benutzermodus in den Kernelmodus wechseln
- (1) Systemaufruf (aktiv)# 🎜🎜#
Systemaufruf (Systemaufruf) ist eine Schnittstelle, die das Betriebssystem dem Benutzerprozess bereitstellt, um das Betriebssystem aufzufordern, einige privilegierte Vorgänge auszuführen, dh ein Fenster, das dem Benutzerprozess Dienste bereitstellt. Unter Linux können Sie den Befehl man syscalls verwenden, um alle von Linux bereitgestellten Systemaufruf-API-Schnittstellen anzuzeigen.
Da der Benutzerstatus bestimmte Aufgaben nicht ausführen kann, fordert der Benutzerstatus den Wechsel zum Kernelstatus an, und der Kernelstatus schließt den Wechsel durch speziell für Benutzer geöffnete Interrupts ab.
(2) Peripheriegerät-Interrupt (passiv) Das Peripheriegerät sendet ein Interrupt-Signal, wenn der Interrupt auftritt, wird der aktuell laufende Prozess angehalten und ausgeführt Wenn die CPU vor dem Interrupt ein Benutzermodusprogramm ausführt, entspricht dies dem Wechsel vom Benutzermodus in den Kernelmodus.
Interrupts werden verwendet, um sicherzustellen, dass die CPU-Steuerung an das Betriebssystem übergeben wird, damit das Betriebssystem bestimmte Vorgänge ausführen kann.
(3) Ausnahme (passiv)
Wenn beim Ausführen des Benutzerprogramms eine unbekannte Ausnahme auftritt, wechselt es vom Benutzerprogramm zu dem Programm im Kernel, das die Ausnahme behandelt, dh es wechselt in den Kernel-Status .
1.3 Prozessschnittstellenfunktion
1.3.1 Prozesserstellung fork/vfork
1, fork(), vfork()
(1) Der neu erstellte Prozess wird als untergeordneter Prozess bezeichnet, der alle Ressourcen des kopiert übergeordneter Prozess (Er wird zum Zeitpunkt der Erstellung nur einmal kopiert. Nach wird der globale Variablenwert unterschiedlich sein Es ist ungewiss, welcher der übergeordneten und untergeordneten Prozesse zuerst kommt.
#include <unistd.h>
pid_t fork(void);
返回值: > 0表示处于父进程中 这个时候的返回值就是**子进程进程id号**
==0 表示处于子进程中
< 0 创建进程出错
#include <sys/types.h>
#include <unistd.h>
pid_t vfork(void); (2) **vfork()** Der untergeordnete Prozess teilt alle Ressourcen des übergeordneten Prozesses. Es muss sein, dass der untergeordnete Prozess zuerst ausgeführt wird und dann der übergeordnete Prozess ausgeführt wird (auch wenn Sie Sleep hinzufügen). ) künstlich einzugreifen Es ist auch nutzlos) (3) Hinweis
Das Ergebnis der Verwendung von exit() im untergeordneten Prozess ist völlig anders als das Ergebnis, wenn es nicht verwendet wird
Unabhängig davon, ob sleep() im übergeordneten Prozess verwendet wird, um aufzugeben Die CPU-Zeitscheibe ist ebenfalls unterschiedlich
Ob im übergeordneten Prozess Die Ergebnisse von wait() und waitpid() sind ebenfalls unterschiedlich
1, exit(), _exit()
#include <stdlib.h>
void exit(int status);
void _exit(int status);
参数:
status --->进程退出时的状态
status在实际编写程序中是可以自己约定的:
比如: exit(2)----》出现打开文件错误
exit(3)----》出现段错误(逻辑错误)
exit(0)----》正常退出
返回: void
区别:
exit()在退出的时候会刷新IO缓冲区,然后才退出(负责任的退出)
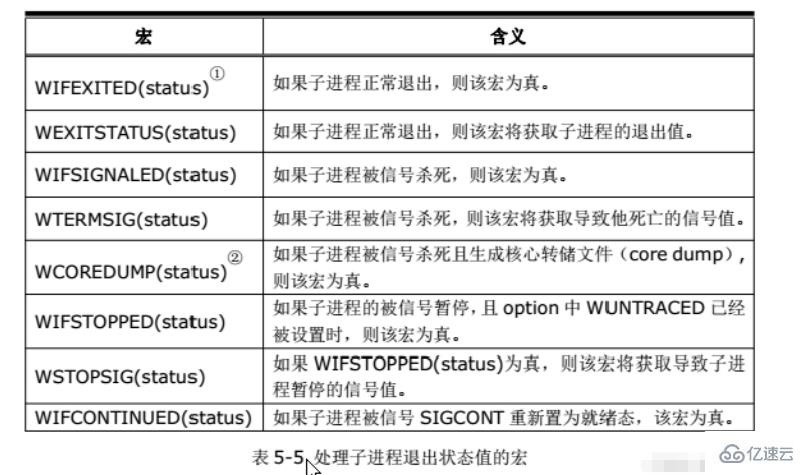
_exit() 直接退出(不负责任的退出)1.3.3 Warten, bis der untergeordnete Prozess beendet wird (der übergeordnete Prozess recycelt Ressourcen) wait/waitpid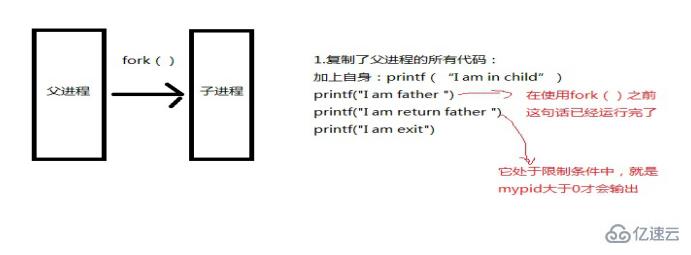
#include <sys/wait.h>
pid_t wait(int *stat_loc);
返回值:你回收的那个子进程的id号
参数:stat_loc --》保存子进程退出时的状态信息(不仅仅只是返回值)
stat_loc里面不仅仅只是保存了exit退出时的数值,它还保存了子进程退出时是哪个信号让它退出的,
出错了是什么原因导致的。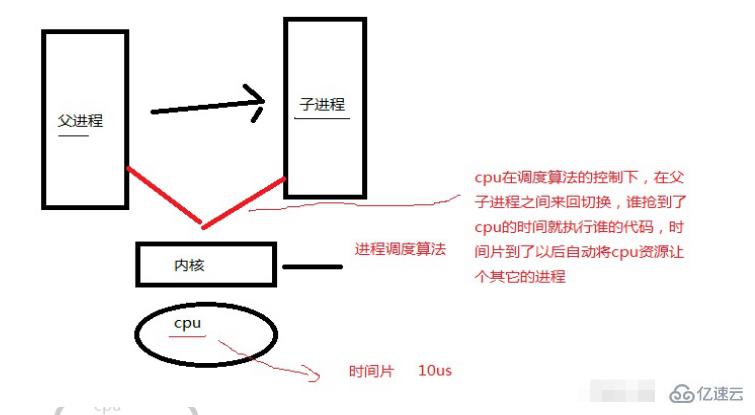 2, waitpid( )
2, waitpid( )
pid_t waitpid(pid_t pid, int *stat_loc, int options); 回收子进程/进程组
参数: pid ----》你指定要回收的那个子进程的id
<-1 等待进程组号为-pid中的某个子进程退出
-1 等待任意一个子进程
==0 等待本进程组中的某个子进程退出
> 0 等待PID为pid的进程
stat_loc-----》存放子进程退出状态(可为NULL)
options ----》一般设置为0
WNOHANG 当没有子进程时立即返回
WUNTRACED 当有子进程被暂停时立即返回
WCONTINUED 当有子进程收到SIGCONT立即返回
返回值:-1 执行失败
> 0 成功 返回值为被回收的进程的PID
0 指定了WNOHANG,且没有已退出的子进程1.3.4 Holen Sie sich die ID des Prozesses – getpid
(1)获取自己的id getpid()
#include <unistd.h>
pid_t getpid(void); 返回值:就是该进程的id号
(2) 获取父进程id getppid()
#include <unistd.h>
pid_t getppid(void); 返回值:就是父进程的id号Kapitel 2 Linux-Multiprozess-Kommunikationsmethode
Ob es sich um Kommunikation zwischen Prozessen oder Kommunikation zwischen Threads handelt. Dieser Satz kann wie folgt umgeschrieben werden: Die Lösung des Zuordnungsproblems gemeinsam genutzter Ressourcen ist sein grundlegender Zweck, der darin besteht, den Zugriff mehrerer Prozesse/Threads auf gemeinsam genutzte Ressourcen zu koordinieren
 2.1 Kommunikationsmethoden zwischen Prozessen
2.1 Kommunikationsmethoden zwischen Prozessen
Semaphor
3. BSD
Netzwerk-Socket (Socket)
- 2.1.1 Unbenannte Pipe-Pipe1. Merkmale: Die originellste prozessübergreifende Kommunikationsmethode Kann nur zwischen Prozessen mit
- Affinitätskommunikation
verwendet werden (Vater-Kind-Prozess, Geschwisterprozess);
Es hat keinen Namen (es existiert); kann in der Freigabe zwischen Linux und Windows erstellt werden (es wird überhaupt keine Pipe-Datei generiert), Named Pipes jedoch nicht ( Pipeline-Datei generieren). ); - Halbduplex-Kommunikation. 2. Verwendung unbenannter Pipes (1) Pipe() erstellen
#include <unistd.h>
int pipe(int fildes[2]);
参数:fildes[2]里面放的是两个文件描述符fildes[0],fildes[1]
fildes[0] 读端
fildes[1] 写端
返回值:成功返回0 失败返回-1(2) Pipe-Informationen senden und empfangen
myid = fork(); //创建子进程
if(myid == 0)
{
write(fd[1],"dad,thanks!",20); //子进程向父进程发送消息
close(fd[1]);
close(fd[0]);
exit(0);
}
else if(myid > 0)
{
read(fd[0],buf,20); //父进程阻塞接受子进程消息
printf("buf is:%s\n",buf);
close(fd[1]);
close(fd[0]);
}- 2.1.2 Benannte Pipes (FIFO)
1 zwei Prozesse
können nicht in einer Freigabe zwischen Linux und Windows erstellt werden;
stellt die Atomizität des Schreibens sicher (Atomizität: entweder nicht ausführen oder in einem Durchgang ohne Einmischung der Außenwelt ausführen);
Berühmte Pipes
können nicht überschrieben und erstellt werden- (Allgemeiner Code verwendet die Funktion access(), um festzustellen, ob sie existiert. Wenn eine Pipe mit demselben Namen bereits vorhanden ist, kann sie nicht erneut erstellt werden);
- Denken Sie daran um es nach der Verwendung zu schließen;
Wenn die Pipe im
schreibgeschützten-Modus geöffnet wird, wird sie blockiert, bis ein anderer Prozess die Pipe im schreibgeschützten
-Modus öffnet Im Lese-/Schreibmodus geöffnet, wird es nicht blockiert.
Vollduplex-Kommunikation, Halbduplex. 2. Verwendung berühmter Pipes. , die Außenwelt ist nicht normal. Es wird ein Signal an das Programm gesendet. Zu diesem Zeitpunkt hat das Programm zwei Möglichkeiten:
Ignorieren (Blockieren/Ignorieren)
Ignorieren: Signal verwerfen.
Darauf reagieren. Warteschlangen werden nicht unterstützt (wenn mehrere Signale gleichzeitig eintreffen, ist die Reaktion unregelmäßig)(2) Benutzerdefinierte Signale 10) SIGUSR1 12) SIGUSR2
(3) Die Signale 34 bis 64 werden als Echtzeitsignale bezeichnet: sie Unterstützungswarteschlangen und Signale, die später im Linux-System hinzugefügt werdenSignale ähneln Interrupts: Hardware und Software
- Zwei der oben genannten Signale sind etwas ganz Besonderes: SIGKILL und SIGSTOP können nicht ignoriert oder blockiert werden
- 2 (1) Signal kill() senden
#include <sys/types.h> #include <sys/stat.h> int mkfifo(const char *pathname, mode_t mode); 参数:pathname 有名管道的路径名 mode:权限 0666 返回值:0 成功 -1 失败(2) Signal erfassen ( )
fifo_read.c :-----------》 #define FIFO1 "myfifo1" #define FIFO2 "myfifo2" int main(void) { int my_fd,fd1,fd2; char r_buff[30]; char w_buff[30]; bzero(r_buff,30); if(access(FIFO1,F_OK)==-1) { my_fd = mkfifo(FIFO1,0664); //创建管道1 if(my_fd == -1) { perror("failed!\n"); return -1; } } if(access(FIFO2,F_OK)==-1) { my_fd = mkfifo(FIFO2,0664); //创建管道2 if(my_fd == -1) { perror("failed!\n"); return -1; } } fd1 = open(FIFO1,O_RDONLY); //只读打开管道1,获取管道文件描述符 if(fd1==-1) { printf("open fifo1 file failed!\n"); exit(0); } fd2 = open(FIFO2,O_WRONLY); //只写打开管道2,获取管道文件描述符 if(fd2==-1) { printf("open fifo2 file failed!\n"); exit(0); } while(1) { bzero(r_buff,30); read(fd1,r_buff,sizeof(r_buff)); //读取管道1的消息 printf("client receive message is: %s\n",r_buff); printf("client please input a message!\n"); fgets(w_buff,30,stdin); write(fd2,w_buff,30); //发送信息给管道2 } close(fd2); close(fd1); return 0; } fifo_write.c :-----------》 #define FIFO1 "myfifo1" #define FIFO2 "myfifo2" int main(void) { int my_fd,fd1,fd2; char w_buff[30]; char r_buff[30]; bzero(w_buff,30); if(access(FIFO1,F_OK)==-1) { my_fd = mkfifo(FIFO1,0664); if(my_fd == -1) { perror("failed!\n"); return -1; } } if(access(FIFO2,F_OK)==-1) { my_fd = mkfifo(FIFO2,0664); if(my_fd == -1) { perror("failed!\n"); return -1; } } fd1 = open(FIFO1,O_WRONLY); if(fd1==-1) { printf("open fifo1 file failed!\n"); exit(0); } fd2 = open(FIFO2,O_RDONLY); if(fd2==-1) { printf("open fifo2 file failed!\n"); exit(0); } while(1) { bzero(w_buff,30); printf("server please input a message!\n"); fgets(w_buff,30,stdin); write(fd1,w_buff,strlen(w_buff)); //写入消息到管道1文件 read(fd2,r_buff,30); //读取信息从管道2 printf("server receive message is:%s\n",r_buff); } close(fd1); close(fd2); return 0; }(3) Signalpause abwarten()#include <unistd.h> int pause(void); 返回值:-1 把error值设为EINTR 0 成功
(4)信号的阻塞
每个进程都有属于它自己的一个信号掩码(也就是该进程在运行的过程中会阻塞掉的那些信号就被称作信号掩码)。
关于信号掩码操作的一系列函数:#include <signal.h> int sigemptyset(sigset_t *set):清空信号掩码 int sigfillset(sigset_t *set):将所有的信号添加到信号掩码中 int sigaddset(sigset_t *set, int signum):将特定的信号添加到信号掩码中 int sigdelset(sigset_t *set, int signum):将特定的信号从掩码中删除 int sigismember(const sigset_t *set, int signum):判断某个信号在不在该掩码中 参数:sigset_t ----》存储被进程阻塞的信号(5)配置信号掩码 sigprocmask()—阻塞或解除阻塞信号
#include <signal.h> int sigprocmask(int how, const sigset_t *restrict set, sigset_t *restrict oset) 参数: how ---》SIG_BLOCK 将set所包含的信号添加到原来的信号掩码中 SIG_SETMASK 用set去替换原来的信号掩码 SIG_UNBLOCK 将set中包含的信号从原来的掩码中删除 set ---》新的信号掩码 oset ---》原本的信号掩码 原本进程中信号掩码包含了:SIGINT ,SIGCONT(6)捕捉指定信号并获取信号携带信息sigaction()
#include <signal.h> int sigaction(int sig, const struct sigaction *restrict act, struct sigaction *restrict oact); 参数: sig ---》你要捕捉的那个信号 act ---》你需要捕捉的信号对应的响应函数就定义在这个结构体 oact ---》原来的 struct sigaction { void(*) (int) sa_handler ----》 信号的响应函数 sigset_t sa_mask ---》信号的掩码 int sa_flags ----》 SA_SIGINFO void(*) (int, siginfo_t * ,void )---》信号的响应函数 } sa_flags ---》等于SA_SIGINFO,那么信号的响应函数是void(*) (int, siginfo_t * ,void ) 不等于,那么信号的响应函数是void(*) (int) siginfo_t---》/usr/include/i386-linux-gnu/bits/siginfo.h 保存的是信号的状态信息,信号的标号,发送该信号的进程的id等等这些2.1.4 共享内存
查看共享内存: ipcs -m
删除共享内存: ipcrm -m 共享内存的id
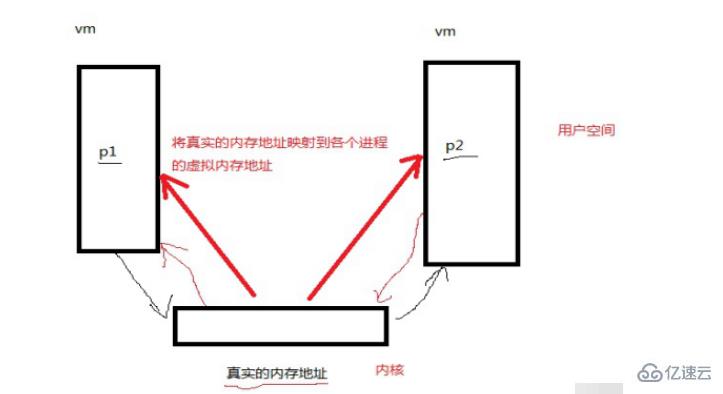
SYSTEM-V ipc通信方式:共享内存、信号量、消息队列。1、共享内存特点:跟mmap()思想上有些类似
在进程通信方式中共享内存是效率最高的,进程可以直接读写内存,而不需要任何数据的拷贝;
如果代码不人为地删除共享共享内存,那么程序退出的时候它还在;
多个进程共享一段内存,因此也需要依靠某种同步机制,如互斥锁和信号量等

2、共享内存对应的一系列操作函数
(1)创建共享内存:shmget()#include <sys/shm.h> int shmget(key_t key, size_t size, int shmflg); 返回值:成功—共享内存对象的mid(标识符) 出错—-1 参数:key----》创建共享内存需要用到的键值 size----》内存空间的大小(字节) shmflg----》设置属性 IPC_CREAT IPC_EXCL 0666组合 key键值的获取有两种方法: **方法一**:使用ftok()生成键值 #include <sys/types.h> #include <sys/ipc.h> key_t ftok(const char *pathname, int proj_id); 参数:pathname----》 路径名 proj_id----》整数 ftok(“.” , 11) 生成一个唯一的key值 进程1:ftok(“.” , 11) ----》shmget( 100);............. 进程2:ftok(“/home/gec” , 11) ----》shmget( 106); 无法通信,要确保键值一致才能通信 **方法二:**不使用ftok(),程序员自己写个数字 shmget((key_t)1234, size_t size, int shmflg);(2) 映射共享内存到用户空间 shmat()
#include <sys/shm.h> void *shmat(int shmid, const void *shmaddr, int shmflg); 返回值:成功—映射到用户空间的那片地址的首地址 出错—-1 参数:shmid ----》使用shmget的返回值 shmaddr----》一般设置为NULL 系统自动分配 shmflg----》 SHM_RDONLY:共享内存只读 一般设置为0: 共享内存可读写 if it is 0 and the calling process has read and write permission, the segment is attached for reading and writing.(3)解除映射:shmdt()
#include <sys/shm.h> int shmdt(const void *shmaddr); 参数:shmaddr----》 shmat()共享内存映射后的地址 返回值:成功—0 出错—-1
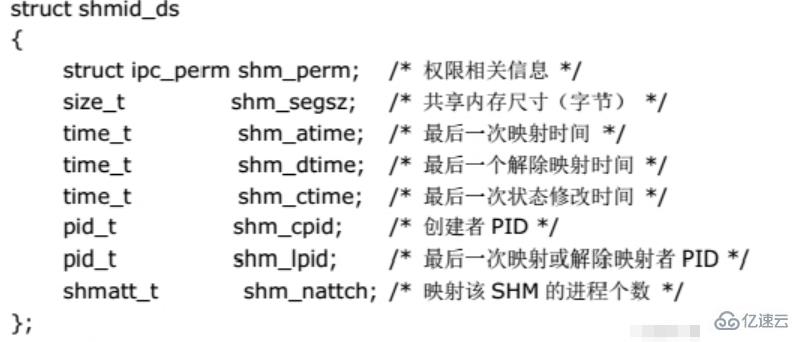
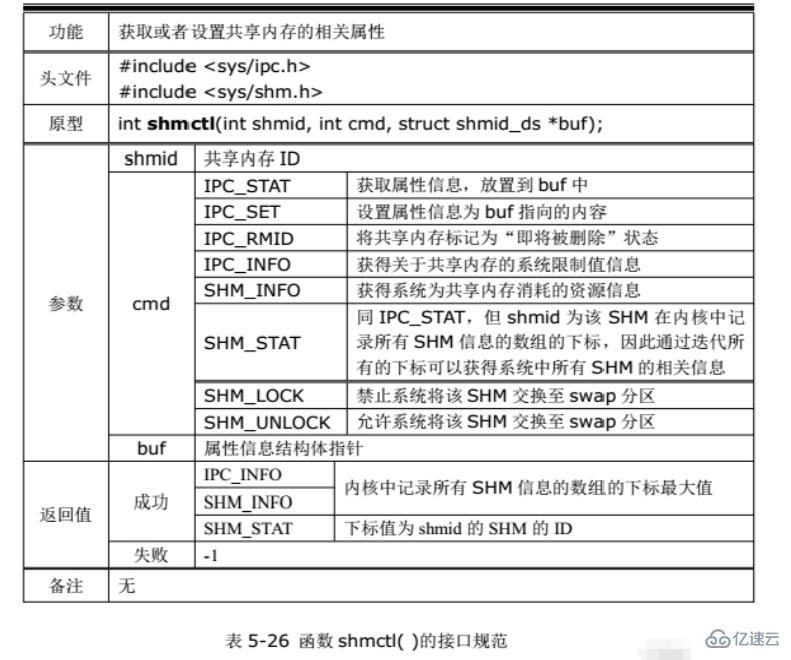
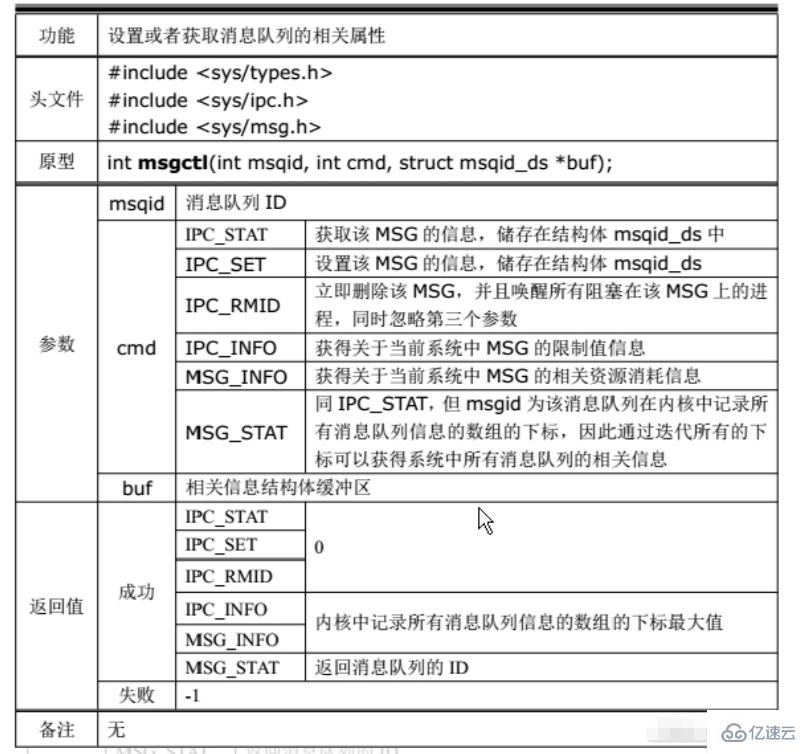
(4)删除共享内存:shmctl()
#include <sys/shm.h> int shmctl(int shmid, int cmd, struct shmid_ds *buf); 参数: shmid----》共享内存的id cmd----》IPC_RMID 删除共享内存 IPC_STAT (获取对象属性) IPC_SET (设置对象属性) *buf----》指定IPC_STAT/IPC_SET时保存共享内存的状态信息 返回值:成功 失败—-13、共享内存简单示例
shm_write.c :----------》 int main() { int shmid; int *p; // 创建共享内存 shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666); if((shmid == -1)&&(errno == EEXIST)) { shmid = shmget((key_t)456,1024,0666); } // 映射共享内存到进程 p = (int *)shmat(shmid,NULL,0); *p = 10; // 解除映射 shmdt(p); // 删除内存 //shmctl(shmid,IPC_RMID,NULL); return 0; } shm_read.c :----------》 int main() { int shmid; int *p; // 创建共享内存 shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666); if((shmid == -1)&&(errno == EEXIST)) { shmid = shmget((key_t)456,1024,0666); } // 映射共享内存到进程 p = (int *)shmat(shmid,NULL,0); printf("p is :%d\n",*p); // 解除映射 shmdt(p); // 删除内存 shmctl(shmid,IPC_RMID,NULL); return 0; }2.1.5消息队列
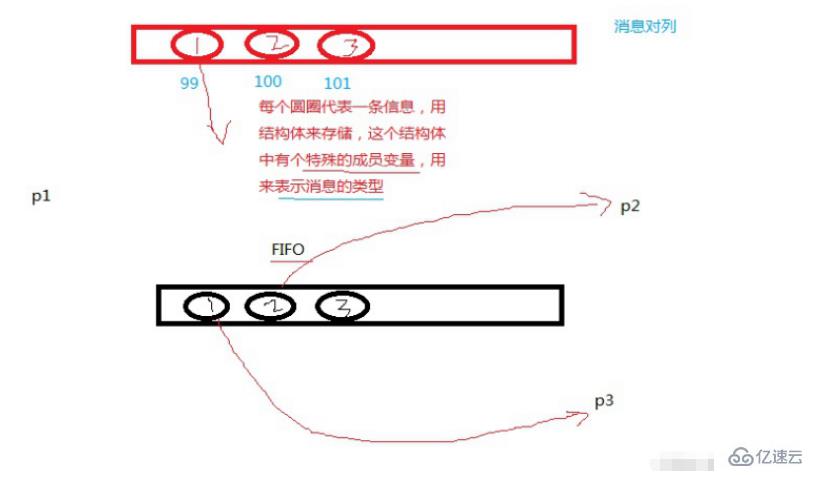
消息队列就是一个消息的列表。用户可以在消息队列中添加消息、读取消息等。
消息队列由消息队列ID来唯一标识
消息队列可以按照类型来发送/接收消息
消息队列的操作包括创建或打开消息队列、添加消息、读取消息和控制消息队列1、消息队列的特点
写入消息队列的信息,在编写程序的时候会人为的去设置消息的类型(用整数来表示),目的是为了其它进程在读取信息的时候能够准确地通过消息的类型判断要读取的信息。2、消息队列操作的系列函数
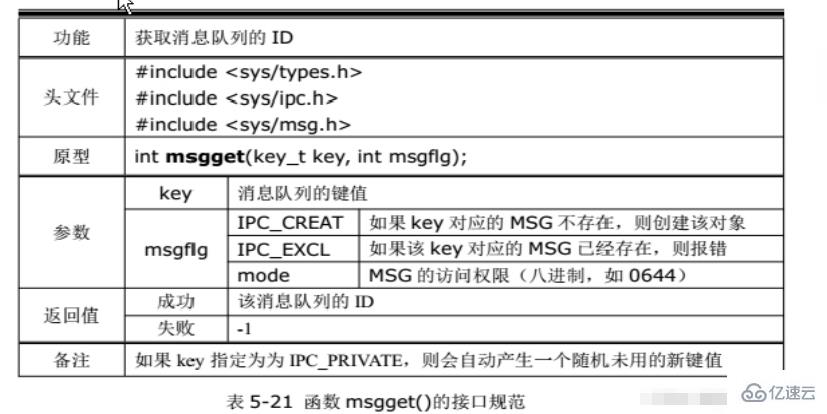
(1)消息队列的创建 msgget()#include <sys/msg.h> int msgget(key_t key, int msgflg);
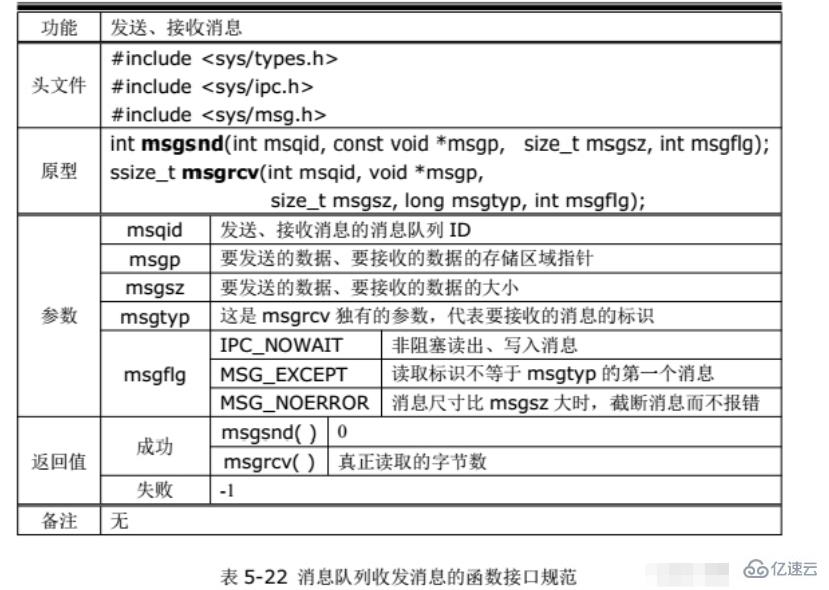
(2)消息队列的收发信息msgsnd()msgrcv()
#include <sys/msg.h> int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg); 参数:void *msgp ----》你要发送信息就存储在这个指针中 在实际的编程中我们都是定义一个结构体来存储信息 struct msgbuf { long mtype; ----》消息的类型 char mtext[100]; ----》消息的内容 } msgsz ----》消息的长度,大小 msgflg ----》设置为0 除开以上三种宏定义之外的----阻塞读写(3)消息队列的删除 msgctl()
#include <sys/msg.h> int msgctl(int msqid, int cmd, struct msqid_ds *buf);
3、消息队列通信简单示例
pthread1.c :-----------》 #define SIZE 64 //数据接收结构体 struct msg_rv { int mtype; char msg[50]; }; //数据发送结构体 struct msg_snd { int mtype; char msg[50]; }; int main(void) { int msgid; struct msg_rv data; struct msg_snd snddata; char buff[50]; //获取msgid msgid = msgget((key_t)123,IPC_CREAT|0666); if(msgid == -1) { printf("msgid failed!\n"); return -1; } data.mtype = 88; snddata.mtype = 89; while(1) { bzero(buff,50); printf("please input data!\n"); fgets(buff,50,stdin); strcpy(snddata.msg,buff); if(strncmp(snddata.msg,"end",3)==0) { break; } msgsnd(msgid,(void *)&snddata,strlen(buff)+4,0);//得到的值发送出去 usleep(20); printf("run here!\n"); if(msgrcv(msgid,(void *)&data,sizeof(struct msg_rv),data.mtype,0)==-1) { printf("msgsnd failed!\n"); return -1; } printf("receive data:%s\n",data.msg); if(strncmp(data.msg,"end",3)==0) { break; } } //撤消消息队列 msgctl(msgid,IPC_RMID,0); return 0; } pthread2.c :------------------------》 #define SIZE 64 //数据接收结构体 struct msg_rv { int mtype; char msg[50]; }; //数据发送结构体 struct msg_snd { int mtype; char msg[50]; }; int main(void) { int msgid; struct msg_rv data; struct msg_snd snddata; char buff[50]; data.mtype = 89; snddata.mtype = 88; //获取msgid msgid = msgget((key_t)123,IPC_CREAT|0666); if(msgid == -1) { printf("msgid failed!\n"); return -1; } while(1) { //接受 if(msgrcv(msgid,(void *)&data,sizeof(struct msg_rv),data.mtype,0)==-1) { printf("msgsnd failed!\n"); return -1; } printf("receive data:%s\n",data.msg); if(strncmp(data.msg,"end",3)==0) { break; } //发送 printf("please input data:\n"); bzero(buff,50); fgets(buff,50,stdin); strcpy(snddata.msg,buff); printf("data = %s\n",snddata.msg); if(strncmp(snddata.msg,"end",3)==0) { break; } msgsnd(msgid,(void *)&snddata,strlen(buff)+4,0);//得到的值发送出去 printf("run here!\n"); } //撤消消息队列 msgctl(msgid,IPC_RMID,0); return 0; }2.1.6 信号量
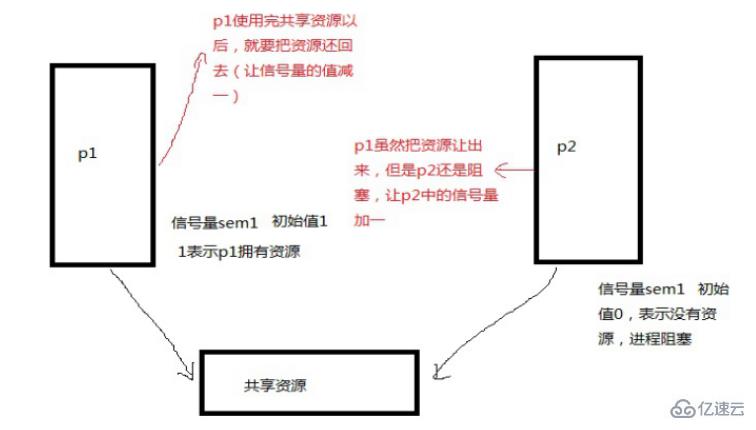
信号量协调不同进程对于共享资源的访问,它是不同进程间或一个给定进程内部不同线程间同步的机制。
1、信号量概述
(1)二值信号量
值为0或1。与互斥锁类似,资源可用时值为1,不可用时值为0
(2)计数信号量
值在0到n之间。用来统计资源,其值代表可用资源数
(3)对信号量的操作
P操作:即申请资源,亦即将信号量值减1,可能引起进程睡眠。
V操作:即释放资源,亦即将信号量值加1,V操作从不会睡眠。
等0操作:不申请也不释放资源,而是令进程阻塞直到信号量的值为0为止2、信号量相关的接口函数
(1) 创建信号量集合semget()#include <sys/sem.h> int semget(key_t key, int nsems, int semflg); 参数:key ----》键值 nsems----》你创建的信号量集中信号量的个数 semflg----》 IPC_CREAT|0666组合 返回值:成功—信号量ID 出错—-1(2)设置/删除信号量集 semctl()
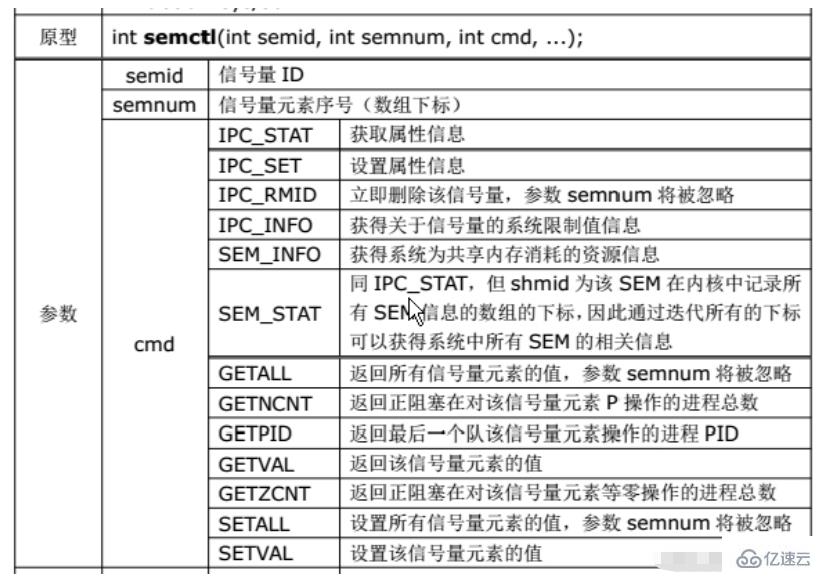
#include <sys/sem.h> int semctl(int semid, int semnum, int cmd, ...); 返回值:成功—0 失败—-1(3)信号量的PV操作 semop()
核心:信号量为 p 减一操作
v 加一操作#include <sys/sem.h> int semop(int semid, struct sembuf *sops, size_t nsops); 返回值:成功—0 出错—-1 参数:semid ----》semget的返回值 nsops ---》要操作的信号量的个数(结构体的个数) sops---》信号量操作结构体 struct sembuf { short sem_num ;=>> 要操作的信号量的编号(数组下标) short sem_op; =>> 0 : 等待,直到信号量的值变成0 1 : 释放资源,V操作 -1 : 分配资源,P操作 short sem_flg; =>> 0/IPC_NOWAIT/SEM_UNDO SEM_UNDO: 程序结束时(不论正常或不正常),保证信号值会被重设为semop()调用前的值; IPC_NOWAIT: 对信号的操作不能满足时,semop()不会阻塞,并立即返回,同时设定错误信息; };3、信号量协同共享内存示例代码
pthread1.c :-----------》 int main() { int semid; int shmid; char *p; struct sembuf mysembuf1,mysembuf2; mysembuf1.sem_num = 0; mysembuf1.sem_flg = SEM_UNDO; mysembuf1.sem_op = 1; mysembuf2.sem_num = 1; mysembuf2.sem_flg = SEM_UNDO; mysembuf2.sem_op = -1; // 创建信号量集合 semid = semget((key_t)789,2,IPC_CREAT|0666); if(semid == -1) { perror("creat sem failed!\n"); return -1; } // 创建共享内存 shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666); if((shmid == -1)&&(errno == EEXIST)) { shmid = shmget((key_t)456,1024,0666); } // 映射共享内存到进程 p = (char *)shmat(shmid,NULL,0); while(1) { semop(semid,&mysembuf2,1); // 对信号量2进行p操作(减一) printf("the message I recv is:%s\n",p); printf("please input a message!\n"); scanf("%s",p); printf("message is %s\n",p); semop(semid,&mysembuf1,1); // 对信号量1进行v操作(加一) } //解除映射 shmdt(p); //删除共享内存 shmctl(semid, IPC_RMID, NULL); } pthread2.c :-----------》 int main() { int semid; int shmid; char *p; struct sembuf mysembuf1,mysembuf2; mysembuf1.sem_num = 0; // 信号集合中的第一个信号 mysembuf1.sem_flg = SEM_UNDO; mysembuf1.sem_op = -1; //p操作 mysembuf2.sem_num = 1; // 信号集合中的第二个信号 mysembuf2.sem_flg = SEM_UNDO; mysembuf2.sem_op = 1; // v操作 // 创建信号量集合 semid = semget((key_t)789,2,IPC_CREAT|0666); if(semid == -1) { perror("creat sem failed!\n"); return -1; } // 设置信号量的值 semctl(semid,0,SETVAL,1); //第一个信号量初值为1 printf("sem num is:%d\n",semctl(semid,0,GETVAL)); semctl(semid,1,SETVAL,0); //第二个信号量初值为0 printf("sem num is:%d\n",semctl(semid,1,GETVAL)); // 创建共享内存 shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666); if((shmid == -1)&&(errno == EEXIST)) { shmid = shmget((key_t)456,1024,0666); } // 映射共享内存到进程 p = (char *)shmat(shmid,NULL,0); while(1) { semop(semid,&mysembuf1,1); // 对信号量1进行p操作(减一)不阻塞,因为初值为1 // 执行完这句话以后信号量的值就立马变成1 printf("the message I recv is:%s\n",p); printf("please input a message!\n"); scanf("%s",p); printf("message is %s\n",p); semop(semid,&mysembuf2,1); // 对信号量2进行v操作(加一)不阻塞,因为初值为0 } //解除映射 shmdt(p); //删除共享内存 shmctl(semid, IPC_RMID, NULL); }2.3 IPC shell命令操作
ipcs -q 查看消息队列
ipcrm -q MSG_ID 删除消息队列
ipcs -m 查看共享内存
ipcrm -m SHM_ID Gemeinsamen Speicher löschen
ipcs -s Semaphor anzeigen
ipcrm -s SEM_ID Löschen 2.2 Vergleich der prozessübergreifenden Kommunikationsmethoden
Pipe: Interprozess mit Affinität, Simplex, Daten im Speicher
- Fifo: kann für jeden Interprozess verwendet werden, Duplex, mit Dateiname, Daten im Speicher
- Signal: einzigartige asynchrone Kommunikationsmethode
- msg: Wird häufig im CS-Modus verwendet, der Zugriff erfolgt über den Nachrichtentyp und kann Priorität haben.
- shm: Am effizientesten (direkter Zugriff auf den Speicher), erfordert Synchronisierung und gegenseitigen Ausschlussmechanismus.
- sem: Zusammenarbeit. Geteilt Das Gedächtnis wird verwendet, um Synchronisierung und gegenseitigen Ausschluss zu erreichen
Das obige ist der detaillierte Inhalt vonKann Linux mehrere Prozesse erstellen?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Erfahren Sie, wie Sie den Nginx-Server unter Linux installieren
- Detaillierte Einführung in den wget-Befehl von Linux
- Ausführliche Erläuterung von Beispielen für die Verwendung von yum zur Installation von Nginx unter Linux
- Detaillierte Erläuterung der Worker-Verbindungsprobleme in Nginx
- Detaillierte Erläuterung des Installationsprozesses von Python3 unter Linux