ros ist eine Linux-Distribution. Der vollständige Name von ROS ist Robot Operating System, was als Roboter-Betriebssystem übersetzt wird. Es basiert auf dem Linux-Kernel und kann nur unter Linux ausgeführt werden. ROS bietet einige Standard-Betriebssystemdienste, wie z. B. Hardware-Abstraktion, zugrunde liegende Gerätesteuerung, gemeinsame Funktionsimplementierung, prozessübergreifende Nachrichtenübermittlung und Paketverwaltung. ROS kann in zwei Schichten unterteilt werden, die oben beschriebene Betriebssystemschicht, und die höhere Schicht sind die verschiedenen Softwarepakete, die von der breiten Benutzerbasis bereitgestellt werden, um verschiedene Funktionen wie Positionierungszuordnung, Aktionsplanung, Wahrnehmung usw. zu implementieren .
Die Betriebsumgebung dieses Tutorials: Linux7.3-System, Dell G3-Computer.
Einführung in die ROS-Definition
ROS steht für Robot Operating System, was als Roboter-Betriebssystem übersetzt wird. Basierend auf dem Linux-Kernel läuft es derzeit nur unter Linux.
ROS-Designer beschreiben ROS als „ROS = Sanitär + Werkzeuge + Fähigkeiten + Ökosystem“, d. h. ROS ist eine Sammlung von Kommunikationsmechanismen, Werkzeugpaketen, Roboterfähigkeiten auf hohem Niveau und Roboterökosystemen.
Wie der Name schon sagt, ist ROS ein System. Es ähnelt dem gewöhnlichen Betriebssystem, das wir verwenden. Mit anderen Worten: Die verschiedenen zugrunde liegenden Parameter, die in verschiedenen Robotern enthalten sind, sind in den Augen derjenigen, die ROS verwenden, gleich. An dieser Stelle ist auch zu erwähnen, dass ROS derzeit über keine visuelle Schnittstelle verfügt. Das von uns verwendete Windows und Linux kann die Bildschnittstelle direkt sehen und bedienen, da sie über eine visuelle Schnittstelle verfügen, ROS jedoch nicht. Unser sogenanntes Betriebssystem muss nicht unbedingt über eine visuelle Oberfläche verfügen. Wenn Sie interessiert sind, können Sie sich die frühesten Betriebssysteme ansehen, die nur Befehlszeilen und keine farbenfrohen Oberflächen hatten.
ROS bietet einige Standard-Betriebssystemdienste, wie Hardware-Abstraktion, zugrunde liegende Gerätesteuerung, gemeinsame Funktionsimplementierung, prozessübergreifende Nachrichtenübermittlung und Paketverwaltung. ROS basiert auf einer Graphenarchitektur, sodass Prozesse auf verschiedenen Knoten verschiedene Informationen (z. B. Erfassung, Steuerung, Status, Planung usw.) empfangen, veröffentlichen und aggregieren können.
ROS kann in zwei Schichten unterteilt werden. Die untere Schicht ist die oben beschriebene Betriebssystemschicht, und die höhere Schicht sind die verschiedenen Softwarepakete, die von der breiten Benutzerbasis bereitgestellt werden, um verschiedene Funktionen wie die Positionierung zu implementieren Kartierung, Aktionsplanung, Wahrnehmung und Simulation usw.
ROS ist ein polysemisches Wort und kann auch ein Kommunikationsmechanismus sein. In der ROS-Entwicklung werden Anwendungen durch Knoten (Knoten) dargestellt, und ein Knoten ist ein ausführbares Programm. Die Kommunikation zwischen Knoten erfolgt über ROS. ROS verwaltet jeden Knoten über den Knotenmanager (Master). Was die konkrete Umsetzung des Prinzips betrifft, werden wir später darauf eingehen.
Darüber hinaus repräsentiert ROS auch eine Reihe von Toolkits, Algorithmen, Fähigkeiten, Plattformen, Ökologie usw. für die Roboterentwicklung.
Die Geschichte von ROS. Um es ganz klar auszudrücken: ROS ist das, was eine Gruppe großer Leute bei der Entwicklung von Robotern für besser hält (es können einige nützliche Bibliotheken und Software sein, oder es können einige Ideen, Protokolle und Standards sein). Bei der Entwicklung von Robotern gibt es keinen einheitlichen Standard für verschiedene Roboter. Jedes Mal, wenn man einen Roboter entwickelt, den man noch nie zuvor gesehen hat, muss man viele Dinge neu lernen, was für die Großen sehr unbequem ist Ich dachte, warum können wir nicht auch ein System für Roboter bauen, um die unterste Schicht zu kapseln? So wurde ROS geboren. Nach Jahren des Polierens ist ROS immer perfekter geworden und wird von immer mehr Menschen verwendet.
ROS-Funktion
Wenn Sie mich fragen möchten, was ROS macht, dann müssen Sie es nur wissen Ein Satz reicht. ROS wird für die Entwicklung von Robotern oder Roboterarmen verwendet.
In der Geschichte der Roboterentwicklung wurde keine Standardisierungsarbeit geleistet. Unterschiedliche Roboter verwenden unterschiedliche Systeme, Programme usw., was die Entwicklung sehr schwierig macht, solange sie plattformübergreifend sind. Um solche Probleme zu lösen, wurde ROS geboren. ROS kann die zugrunde liegende Hardware durch Kapselung für Entwickler transparent machen, wodurch die Schwierigkeit der plattformübergreifenden Entwicklung erheblich verringert wird.
Der Grund, warum wir uns für ROS entschieden haben, ist, dass jeder es wie oben erwähnt verstehen sollte. Es ist nichts anderes, als dass es von vielen Menschen verwendet wird und eine große Popularität genießt. ROS enthält viele Felder, Daten, Funktionen, Inhalte, Wissen usw. Möchten Sie Ihre eigene Datenbank kompilieren, ohne sie zu verwenden?
1. Leistungsmerkmale von ROS
Bevor wir ROS offiziell lernen, stellen wir zunächst einige Funktionen von ROS vor, nämlich das Metabetriebssystem und die Verteilungskommunikation Mechanismus, lose gekoppeltes Software-Framework, umfangreiche Open-Source-Funktionsbibliothek usw., um jedem zu helfen, ein gewisses Wahrnehmungsverständnis zu entwickeln.
ROS ist ein Meta-Betriebssystem im Bereich Robotik. Mit anderen Worten, es handelt sich nicht um ein Betriebssystem im eigentlichen Sinne. Die zugrunde liegende Aufgabenplanung, Kompilierung, Gerätetreiber usw. werden immer noch durch das native Betriebssystem Ubuntu Linux vervollständigt.
ROS ist eigentlich ein Unterbetriebssystem , das auf Ubuntu Linux oder einem Software-Framework läuft, aber Hardware-Abstraktion, Funktionsaufrufe, Prozessverwaltung usw. ähnlich wie beim Betrieb bietet Function bietet auch Funktionen und Tools für die Erfassung, Kompilierung und plattformübergreifende Nutzung.
Die Kernidee von ROS besteht darin, die Softwarefunktionen des Roboters in Knoten umzuwandeln und die Knoten durch gegenseitiges Senden von Nachrichten zu kommunizieren. Diese Knoten können auf demselben Host, auf verschiedenen Hosts oder sogar im Internet bereitgestellt werden. Der Masterknoten (Master) im ROS-Netzwerkkommunikationsmechanismus ist für die Verwaltung und Planung des Kommunikationsprozesses zwischen verschiedenen Knoten im Netzwerk verantwortlich und stellt gleichzeitig einen Dienst zum Konfigurieren globaler Parameter im Netzwerk bereit.
ROS ist ein lose gekoppeltes Software-Framework, das einen verteilten Kommunikationsmechanismus verwendet, um die Prozesskommunikation zwischen Knoten zu erreichen. Der Softwarecode von ROS ist lose gekoppelt organisiert, mit einem flexiblen Entwicklungsprozess und einfacher Verwaltung und Wartung.
ROS verfügt über eine umfangreiche Open-Source-Funktionsbibliothek. ROS ist eine Open-Source-Software, die auf dem BSD-Protokoll (Berkeley Software Distribution) basiert und es jedem ermöglicht, sie zu ändern, wiederzuverwenden, weiterzuverbreiten und in kommerziellen und Closed-Source-Produkten zu verwenden. Mit ROS können Sie schnell Ihren eigenen Roboterprototyp erstellen.
2. ROS-Distribution
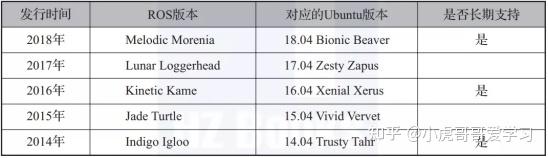
Ähnlich wie die Linux-Distribution verfügt die ROS-Distribution über eine Reihe häufig verwendeter Funktionspakete, die zum Packen und Installieren des ROS-Systems im nativen System dienen. ROS wurde ursprünglich auf Basis des Ubuntu-Systems entwickelt. Auch für den Release-Versionsnamen von ROS gelten die gleichen Regeln wie für Ubuntu, d. h. der Versionsname besteht aus zwei englischen Wörtern mit demselben Anfangsbuchstaben und die ersten Buchstaben der Version werden ausgewählt Abbildung 1-1 zeigt in aufsteigender Reihenfolge des Alphabets einige Hauptversionen von ROS.
Abbildung 1-1 Hauptversionen von ROS
ROS-Systemarchitektur
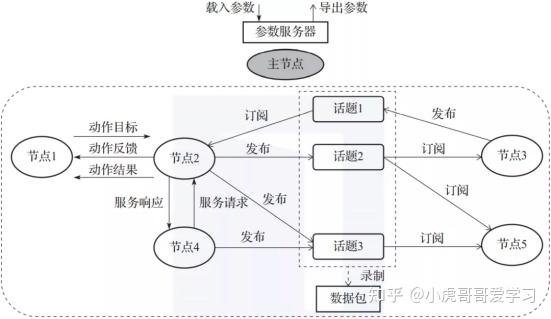
Nach der Installation von ROS sollten viele Freunde bestrebt sein, sofort mit dem Schreiben von Programmen zu beginnen. Da die Architektur von ROS relativ komplex ist, diskutieren wir zunächst die Systemarchitektur von ROS, damit jeder ein umfassendes Verständnis der verschiedenen Konzepte in ROS erlangen kann, um die verschiedenen Konzepte, auf die man später stößt, leichter zu verstehen. Laut offizieller Aussage kann die ROS-Architektur aus den Perspektiven „Berechnungsgraph“, „Dateisystem“ und „Open-Source-Community“ verstanden werden. 1. Verstehen Sie die ROS-Architektur aus der Perspektive des Rechendiagramms. Die Grundeinheit ausführbarer Programme in ROS wird als Knoten (Knoten) bezeichnet und bildet so ein Netzwerkdiagramm wird auch als Berechnungsdiagramm bezeichnet, wie in Abbildung 1-3 dargestellt.
Abbildung 1-3 Struktur des ROS-Berechnungsdiagramms
Knoten sind ausführbare Programme, die normalerweise auch Prozesse genannt werden. Jedes im ROS-Funktionspaket erstellte ausführbare Programm wird zu einem ROS-Knoten, nachdem es gestartet und in den Systemprozess geladen wurde, z. B. Knoten 1, Knoten 2, Knoten 3 usw. in Abbildung 1-3. (Thema), service (Dienst) und action (Aktion), wie in Abbildung 1-3 dargestellt Knoten 2 und Knoten 3. Knoten 2 und Knoten 5 verwenden Themenkommunikation, Knoten 2 und Knoten 4 verwenden Dienstkommunikation und Knoten 1 und Knoten 2 verwenden Aktionskommunikation.
Knoten, Themen, Dienste und Aktionen im Berechnungsdiagramm müssen eindeutige Namen als Bezeichner haben.
ROS verwendet Knoten, um Code und Funktionen zu entkoppeln und so die Fehlertoleranz und Wartbarkeit des Systems zu verbessern. Daher ist es besser, dass jeder Knoten eine bestimmte Einzelfunktion erfüllt, als einen riesigen, allumfassenden Knoten zu erstellen. Wenn Sie C++ zum Schreiben von Knoten verwenden, müssen Sie die von ROS bereitgestellte Roscpp-Bibliothek verwenden. Wenn Sie Python zum Schreiben von Knoten verwenden, müssen Sie die von ROS bereitgestellte Rospy-Bibliothek verwenden. Nachrichten sind der Schlüssel zum Berechnungsdiagramm, einschließlich Nachrichtenmechanismus und Nachrichtentyp. Es gibt drei Arten von Nachrichtenmechanismen: Thema, Dienst und Aktion. Die in jedem Nachrichtenmechanismus übertragenen Daten haben einen bestimmten Datentyp (d. h. Nachrichtentypen können in Themennachrichtentypen, Dienstnachrichtentypen und Aktionsnachrichtentypen unterteilt werden). Der Nachrichtenmechanismus und die Nachrichtentypen werden in Abschnitt 1.5 erläutert. Datenpaket (Rosbag) ist eine Datei in ROS, die speziell zum Speichern und Wiedergeben von Daten in Themen verwendet wird. Einige schwierig zu erfassende Sensordaten können in Datenpaketen aufgezeichnet und dann wiederholt abgespielt werden, um die Leistung des Algorithmus zu debuggen.
Der Parameterserver kann leicht geänderte Parameter für Knoten im gesamten ROS-Netzwerk bereitstellen. Parameter können als globale Variablen im Knoten betrachtet werden, die extern geändert werden können, einschließlich statischer Parameter und dynamischer Parameter. Statische Parameter werden im Allgemeinen verwendet, um den Knoten-Arbeitsmodus festzulegen, wenn der Knoten startet. Dynamische Parameter können verwendet werden, um den Knoten dynamisch zu konfigurieren oder den Knoten-Arbeitsstatus zu ändern, wenn der Knoten läuft, z. B. PID-Steuerungsparameter im Motorsteuerungsknoten.
Der Masterknoten ist für die Planung und Verwaltung des Kommunikationsprozesses zwischen verschiedenen Knoten verantwortlich. Daher muss zuerst der Masterknoten gestartet werden und kann über den Befehl roscore gestartet werden.
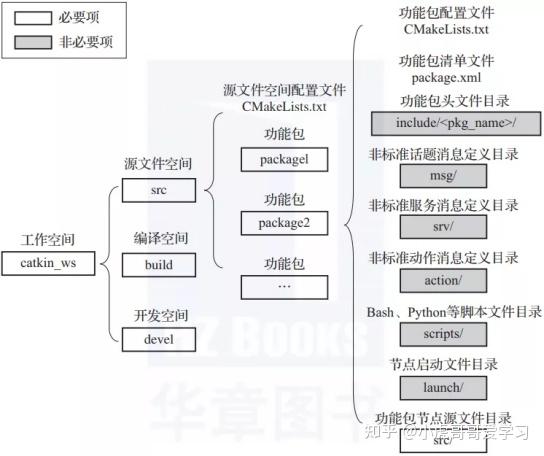
2. Verstehen Sie die ROS-Architektur aus der Sicht des Dateisystems. Verschiedene Komponenten des ROS-Programms sollten in verschiedenen Ordnern abgelegt werden. Dies ist die Dateisystemstruktur von ROS Wie in Abbildung 1-4 dargestellt.
Ein Arbeitsbereich ist ein Ordner, der Funktionspakete, kompilierte Pakete und kompilierte ausführbare Dateien enthält. Benutzer können je nach Bedarf mehrere Arbeitsbereiche erstellen und Funktionspakete für verschiedene entwickeln Zwecken in jedem Arbeitsbereich. In Abbildung 1-4 haben wir einen Arbeitsbereich namens catkin_ws erstellt, der drei Ordner enthält: src, build und devel. src-Ordner
Platzieren Sie jedes Funktionspaket und die CMake-Konfigurationsdatei CMakeLists.txt, die das Funktionspaket konfiguriert. Zur Erläuterung: Da der Quellcode in ROS mit dem Catkin-Tool kompiliert wird und das Catkin-Tool auf der CMake-Technologie basiert, sehen wir im src-Quelldateibereich eine CMake-Konfigurationsdatei CMakeLists.txt und diese Datei spielt eine Rolle Konfigurieren Sie die Rolle der Kompilierung.
Build-Ordner
Platzieren Sie den Cache, die Konfiguration, Zwischendateien usw., die beim Kompilieren von CMake- und Catkin-Funktionspaketen generiert werden.
Entwicklungsordner
Kompilierte ausführbare Programme ablegen. Diese ausführbaren Programme können direkt ohne Installation ausgeführt werden. Sobald der Quellcode des Funktionspakets kompiliert und getestet ist, können diese kompilierten ausführbaren Dateien direkt exportiert und mit anderen Entwicklern geteilt werden.
Funktionspaket ist die Grundform der Softwareorganisation in ROS. Es verfügt über die Mindeststruktur und den Mindestinhalt, um ein ROS-Programm zu erstellen. Es enthält ROS-Knoten-Quellcode, Skripte, Konfigurationsdateien usw.
i. CMakeLists.txt ist die Funktionspaket-Konfigurationsdatei, die zum Kompilieren der Kompilierungskonfiguration des Cmake-Funktionspakets verwendet wird. ii. package.xml ist eine Funktionspaket-Manifestdatei. Sie verwendet das XML-Tag-Format, um verschiedene verwandte Informationen des Funktionspakets zu markieren, z. B. den Namen des Pakets, Entwicklerinformationen, Abhängigkeiten usw., hauptsächlich um die Installation zu erleichtern und die Installation des Funktionspakets ist einfacher. iii. include/ ist das Funktionspaket-Header-Dateiverzeichnis, und die im Funktionspaketprogramm enthaltenen *.h-Header-Dateien können hier abgelegt werden. Der Grund, warum das Include-Verzeichnis auch einen Pfad der ersten Ebene hinzufügt, besteht darin, zwischen selbstdefinierten Header-Dateien und System-Standard-Header-Dateien zu unterscheiden. Dieser Ordner ist jedoch nicht erforderlich. Einige Programme verfügen beispielsweise nicht über Header-Dateien. iv. Die drei Ordner msg, srv und action werden zum Speichern von Definitionsdateien für nicht standardmäßige Themennachrichten, Servicenachrichten und Aktionsnachrichten verwendet. ROS unterstützt Benutzer dabei, die im Nachrichtenkommunikationsprozess verwendeten Nachrichtentypen anzupassen. Diese benutzerdefinierten Nachrichten sind nicht erforderlich, da das Programm nur Standardnachrichtentypen verwendet. v. Das Skriptverzeichnis speichert Bash-, Python- und andere Skriptdateien und ist nicht erforderlich. vi. Das Startverzeichnis speichert die Startdateien der Knoten. Die *.launch-Datei wird zum Starten eines oder mehrerer Knoten verwendet. Sie ist sehr nützlich in großen Projekten mit mehreren Knoten. vii. Das src-Verzeichnis speichert den Quellcode, der dem Funktionspaketknoten entspricht. Ein Funktionspaket kann mehrere Knotenprogramme enthalten, um verschiedene Funktionen auszuführen, und jedes Knotenprogramm kann unabhängig ausgeführt werden. Das src-Verzeichnis speichert hier den Quellcode dieser Knotenprogramme. Sie können nach Bedarf Ordner und Dateien erstellen, um den Quellcode zu organisieren.
3. Verstehen Sie die ROS-Architektur aus der Perspektive der Open-Source-Community
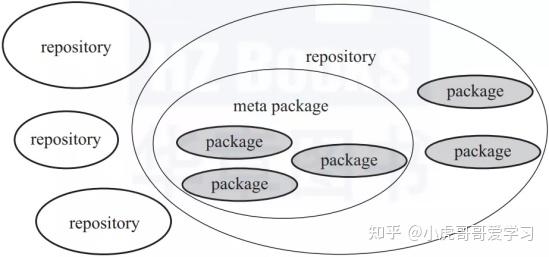
ROS ist Open-Source-Software. Jede unabhängige Online-Community teilt Software und Tutorials und bildet so eine leistungsstarke ROS-Open-Source-Community -5. Abbildung 1-5 ROS-Open-Source-Community-Struktur
Die Entwicklung von ROS basiert auf Open-Source- und gemeinsam genutzter Software. Diese Codes werden von verschiedenen Organisationen geteilt und veröffentlicht, beispielsweise von GitHub Source Code Sharing und dem Ubuntu-Software-Repository Veröffentlichung usw. Sanfangku et al. Das offizielle Wiki von ROS ist eine wichtige Community für Dokumentdiskussionen, in der Sie entsprechende Dokumentseiten einfach veröffentlichen und ändern können. Die ROS-Antwort-Homepage enthält eine große Anzahl von Fragen und Antworten von ROS-Entwicklern, und die Diskussionen zu verschiedenen Problemen, die bei der ROS-Entwicklung auftreten, sind sehr aktiv.
Das obige ist der detaillierte Inhalt vonWelche Linux-Version ist Ros?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
Der Inhalt dieses Artikels wird freiwillig von Internetnutzern beigesteuert und das Urheberrecht liegt beim ursprünglichen Autor. Diese Website übernimmt keine entsprechende rechtliche Verantwortung. Wenn Sie Inhalte finden, bei denen der Verdacht eines Plagiats oder einer Rechtsverletzung besteht, wenden Sie sich bitte an admin@php.cn




 (Thema),
(Thema),  service
service