
Heim >Backend-Entwicklung >Python-Tutorial >Detaillierte Erläuterung der Verwendung von PyTorch zur Implementierung der Zielerkennung und -verfolgung
Detaillierte Erläuterung der Verwendung von PyTorch zur Implementierung der Zielerkennung und -verfolgung
- coldplay.xixinach vorne
- 2020-12-11 17:18:459110Durchsuche
Python-TutorialSpalte stellt die Verwendung von PyTorch zur Zielerkennung und -verfolgung vor
Einführung 
Lädt dann die vorab trainierte Konfiguration und die Gewichte sowie einige vordefinierte Werte, darunter: die Abmessungen des Bildes, den Konfidenzschwellenwert und den nicht maximalen Unterdrückungsschwellenwert.Im gestrigen Artikel haben wir erläutert, wie Sie Ihre eigenen Bilder in PyTorch verwenden, um einen Bildklassifikator zu trainieren und ihn dann für die Bilderkennung zu verwenden. In diesem Artikel wird gezeigt, wie Sie mit einem vorab trainierten Klassifikator mehrere Objekte in Bildern erkennen und in Videos verfolgen können. Zielerkennung in BildernEs gibt viele Algorithmen zur Zielerkennung, YOLO und SSD sind derzeit die beliebtesten Algorithmen. In diesem Artikel verwenden wir YOLOv3. Wir werden YOLO hier nicht im Detail besprechen. Wenn Sie mehr darüber erfahren möchten, können Sie auf den Link unten verweisen ~ (https://pjreddie.com/darknet/yolo/)Lass uns beginnen und das Modul noch importieren startet:
from models import * from utils import * import os, sys, time, datetime, random import torch from torch.utils.data import DataLoader from torchvision import datasets, transforms from torch.autograd import Variable import matplotlib.pyplot as plt import matplotlib.patches as patches from PIL import Image
config_path='config/yolov3.cfg' weights_path='config/yolov3.weights' class_path='config/coco.names' img_size=416 conf_thres=0.8 nms_thres=0.4 # Load model and weights model = Darknet(config_path, img_size=img_size) model.load_weights(weights_path) model.cuda() model.eval() classes = utils.load_classes(class_path) Tensor = torch.cuda.FloatTensorDie folgende Funktion gibt die Erkennungsergebnisse für das angegebene Bild zurück.
def detect_image(img):
# scale and pad image
ratio = min(img_size/img.size[0], img_size/img.size[1])
imw = round(img.size[0] * ratio)
imh = round(img.size[1] * ratio)
img_transforms=transforms.Compose([transforms.Resize((imh,imw)),
transforms.Pad((max(int((imh-imw)/2),0),
max(int((imw-imh)/2),0), max(int((imh-imw)/2),0),
max(int((imw-imh)/2),0)), (128,128,128)),
transforms.ToTensor(),
])
# convert image to Tensor
image_tensor = img_transforms(img).float()
image_tensor = image_tensor.unsqueeze_(0)
input_img = Variable(image_tensor.type(Tensor))
# run inference on the model and get detections
with torch.no_grad():
detections = model(input_img)
detections = utils.non_max_suppression(detections, 80,
conf_thres, nms_thres)
return detections[0]Abschließend erhalten wir die Erkennungsergebnisse, indem wir ein Bild laden und es dann mit einem Begrenzungsrahmen um das erkannte Objekt anzeigen. Und verwenden Sie zur Unterscheidung unterschiedliche Farben für verschiedene Klassen.
# load image and get detections
img_path = "images/blueangels.jpg"
prev_time = time.time()
img = Image.open(img_path)
detections = detect_image(img)
inference_time = datetime.timedelta(seconds=time.time() - prev_time)
print ('Inference Time: %s' % (inference_time))
# Get bounding-box colors
cmap = plt.get_cmap('tab20b')
colors = [cmap(i) for i in np.linspace(0, 1, 20)]
img = np.array(img)
plt.figure()
fig, ax = plt.subplots(1, figsize=(12,9))
ax.imshow(img)
pad_x = max(img.shape[0] - img.shape[1], 0) * (img_size / max(img.shape))
pad_y = max(img.shape[1] - img.shape[0], 0) * (img_size / max(img.shape))
unpad_h = img_size - pad_y
unpad_w = img_size - pad_x
if detections is not None:
unique_labels = detections[:, -1].cpu().unique()
n_cls_preds = len(unique_labels)
bbox_colors = random.sample(colors, n_cls_preds)
# browse detections and draw bounding boxes
for x1, y1, x2, y2, conf, cls_conf, cls_pred in detections:
box_h = ((y2 - y1) / unpad_h) * img.shape[0]
box_w = ((x2 - x1) / unpad_w) * img.shape[1]
y1 = ((y1 - pad_y // 2) / unpad_h) * img.shape[0]
x1 = ((x1 - pad_x // 2) / unpad_w) * img.shape[1]
color = bbox_colors[int(np.where(
unique_labels == int(cls_pred))[0])]
bbox = patches.Rectangle((x1, y1), box_w, box_h,
linewidth=2, edgecolor=color, facecolor='none')
ax.add_patch(bbox)
plt.text(x1, y1, s=classes[int(cls_pred)],
color='white', verticalalignment='top',
bbox={'color': color, 'pad': 0})
plt.axis('off')
# save image
plt.savefig(img_path.replace(".jpg", "-det.jpg"),
bbox_inches='tight', pad_inches=0.0)
plt.show()Hier sind einige unserer Erkennungsergebnisse:
Objektverfolgung im Video
Jetzt wissen Sie, wie Sie verschiedene Objekte in Bildern erkennen. Wenn Sie es Bild für Bild in einem Video betrachten, sehen Sie, wie sich diese Tracking-Boxen bewegen. Wenn diese Videobilder jedoch mehrere Objekte enthalten, woher wissen Sie dann, ob das Objekt in einem Bild mit dem Objekt im vorherigen Bild übereinstimmt? Dies wird als Objektverfolgung bezeichnet und verwendet mehrere Erkennungen, um ein bestimmtes Objekt zu identifizieren. Hierfür gibt es mehrere Algorithmen. In diesem Artikel habe ich mich für die Verwendung von SORT (Simple Online and Realtime Tracking) entschieden, das einen Kalman-Filter verwendet, um die Flugbahn eines zuvor identifizierten Ziels vorherzusagen und sie mit neuen Erkennungsergebnissen abzugleichen. Sehr praktisch und schnell. Jetzt beginnen wir mit dem Schreiben des Codes. Die ersten drei Codefragmente sind die gleichen wie bei der Einzelbilderkennung, da sie sich mit der YOLO-Erkennung in einem einzelnen Bild befassen. Der Unterschied liegt im letzten Teil: Für jede Erkennung rufen wir die Update-Funktion des Sortierobjekts auf, um einen Verweis auf das Objekt im Bild zu erhalten. Im Gegensatz zur regulären Erkennung im vorherigen Beispiel (einschließlich der Koordinaten des Begrenzungsrahmens und der Klassenvorhersage) erhalten wir also das verfolgte Objekt, einschließlich zusätzlich zu den oben genannten Parametern, einer Objekt-ID. Und Sie müssen OpenCV verwenden, um das Video zu lesen und die Videobilder anzuzeigen.
Jetzt beginnen wir mit dem Schreiben des Codes. Die ersten drei Codefragmente sind die gleichen wie bei der Einzelbilderkennung, da sie sich mit der YOLO-Erkennung in einem einzelnen Bild befassen. Der Unterschied liegt im letzten Teil: Für jede Erkennung rufen wir die Update-Funktion des Sortierobjekts auf, um einen Verweis auf das Objekt im Bild zu erhalten. Im Gegensatz zur regulären Erkennung im vorherigen Beispiel (einschließlich der Koordinaten des Begrenzungsrahmens und der Klassenvorhersage) erhalten wir also das verfolgte Objekt, einschließlich zusätzlich zu den oben genannten Parametern, einer Objekt-ID. Und Sie müssen OpenCV verwenden, um das Video zu lesen und die Videobilder anzuzeigen.
videopath = 'video/interp.mp4'
%pylab inline
import cv2
from IPython.display import clear_output
cmap = plt.get_cmap('tab20b')
colors = [cmap(i)[:3] for i in np.linspace(0, 1, 20)]
# initialize Sort object and video capture
from sort import *
vid = cv2.VideoCapture(videopath)
mot_tracker = Sort()
#while(True):
for ii in range(40):
ret, frame = vid.read()
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
pilimg = Image.fromarray(frame)
detections = detect_image(pilimg)
img = np.array(pilimg)
pad_x = max(img.shape[0] - img.shape[1], 0) *
(img_size / max(img.shape))
pad_y = max(img.shape[1] - img.shape[0], 0) *
(img_size / max(img.shape))
unpad_h = img_size - pad_y
unpad_w = img_size - pad_x
if detections is not None:
tracked_objects = mot_tracker.update(detections.cpu())
unique_labels = detections[:, -1].cpu().unique()
n_cls_preds = len(unique_labels)
for x1, y1, x2, y2, obj_id, cls_pred in tracked_objects:
box_h = int(((y2 - y1) / unpad_h) * img.shape[0])
box_w = int(((x2 - x1) / unpad_w) * img.shape[1])
y1 = int(((y1 - pad_y // 2) / unpad_h) * img.shape[0])
x1 = int(((x1 - pad_x // 2) / unpad_w) * img.shape[1])
color = colors[int(obj_id) % len(colors)]
color = [i * 255 for i in color]
cls = classes[int(cls_pred)]
cv2.rectangle(frame, (x1, y1), (x1+box_w, y1+box_h),
color, 4)
cv2.rectangle(frame, (x1, y1-35), (x1+len(cls)*19+60,
y1), color, -1)
cv2.putText(frame, cls + "-" + str(int(obj_id)),
(x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX,
1, (255,255,255), 3)
fig=figure(figsize=(12, 8))
title("Video Stream")
imshow(frame)
show()
clear_output(wait=True) Verwandte kostenlose Lernempfehlungen:
Verwandte kostenlose Lernempfehlungen:
(Video)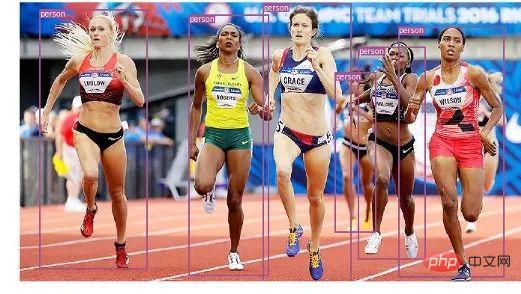
Das obige ist der detaillierte Inhalt vonDetaillierte Erläuterung der Verwendung von PyTorch zur Implementierung der Zielerkennung und -verfolgung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- So implementieren Sie das Faltungs-Neuronale Netzwerk CNN auf PyTorch
- Beispiel für den Aufbau eines einfachen neuronalen Netzwerks auf PyTorch zur Implementierung von Regression und Klassifizierung
- Pytorch + Visdom CNN-Methode zur Verarbeitung selbst erstellter Bilddatensätze
- Detaillierte Erläuterung der PyTorch-Installationsanleitung