
Heim >Java >javaLernprogramm >Analyse von AbstractQueuedSynchronizer: Wichtige und schwierige Punkte im exklusiven Modus
Analyse von AbstractQueuedSynchronizer: Wichtige und schwierige Punkte im exklusiven Modus
- 巴扎黑Original
- 2017-06-23 10:56:241558Durchsuche
Über AbstractQueuedSynchronizer
Das Parallelitätspaket java.util.concurrent wurde nach JDK1.5 eingeführt, was die Parallelitätsleistung von Java-Programmen erheblich verbesserte . Ich fasse das java.util.concurrent-Paket wie folgt zusammen:
AbstractQueuedSynchronizer ist der Kern gleichzeitiger Klassen wie ReentrantLock, CountDownLatch und Semphore
CAS-Algorithmus ist der Kern von AbstractQueuedSynchronizer
Man kann sagen, dass AbstractQueuedSynchronizer die höchste Priorität hat Parallelitätsklasse. Tatsächlich wurde AbstractQueuedSynchronizer in dem Artikel „Eingehende Untersuchung der ReentrantLock-Implementierungsprinzipien“ in Kombination mit ReentrantLock ausführlich erläutert, aber aufgrund des aktuellen Stands habe ich diesen Artikel vor anderthalb Jahren noch einmal gelesen Ich bin der Meinung, dass die Interpretation und das Verständnis von AbstractQueuedSynchronizer nicht tief genug sind. Daher finden Sie hier ein Update. Dieser Artikel erläutert noch einmal die Datenstruktur von AbstractQueuedSynchronizer, dh die relevante Quellcode-Implementierung.
Die grundlegende Datenstruktur von AbstractQueuedSynchronizer
Die grundlegende Datenstruktur von AbstractQueuedSynchronizer ist Node , über Der Autor von Node und JDK habe ausführliche Kommentare geschrieben:
Die Warteschlange von AbstractQueuedSynchronizer ist eine Variante der CLH-Warteschlange Wird normalerweise für die Spin-Sperre verwendet. Die Warteschlange von AbstractQueuedSynchronizer wird zum Blockieren des Synchronizers verwendet.
Jeder Knoten enthält ein Feld mit dem Namen „Status“, das angibt, ob es sich um einen Thread handelt Das sollte blockiert sein, aber das Statusfeld garantiert keine Sperrung
Wenn sich ein Thread an der Spitze der Warteschlange befindet, wird er versuchen, ihn zu erwerben, aber wird der Kopf Erfolg ist nicht garantiert, es hat nur das Recht zu konkurrieren
Um in die Warteschlange zu gelangen, müssen Sie sie nur am Ende automatisch verbinden queue; um es aus der Warteschlange zu entfernen. Zum Entfernen müssen Sie nur das Header-Feld festlegen
Im Folgenden verwende ich eine Tabelle, um zusammenzufassen, welche Variablen in Node enthalten sind und die Bedeutung jeder Variablen:
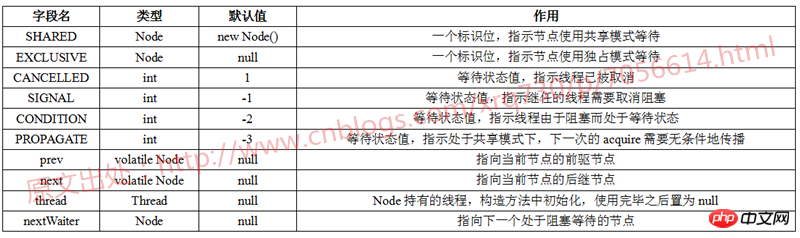
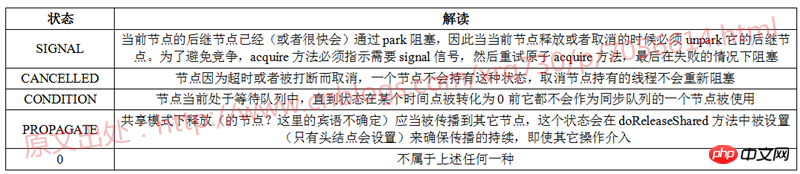
Zu den vier Zuständen SIGNAL, CANCELLED, CONDITION und PROPAGATE gibt es auch eine detaillierte Erklärung in den Kommentaren des JDK-Quellcodes. Die Tabelle fasst zusammen:
AbstractQueuedSynchronizer-Methoden für Unterklassen implementieren
AbstractQueuedSynchzonizer basiert auf der Implementierung des Vorlagenmodus, aber sein Vorlagenmodus ist etwas speziell. Stattdessen gibt es diese Methoden müssen von Unterklassen implementiert werden, die UnsupportedOperationException über einen Methodenkörper auslösen, um Unterklassen darüber zu informieren.
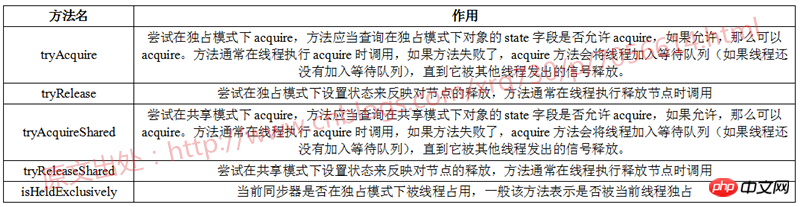
Es gibt fünf Methoden in der AbstractQueuedSynchronizer-Klasse, die von Unterklassen implementiert werden können:
Acquire ist hier schwer zu übersetzen, daher setze ich das ursprüngliche Wort direkt ein, da „acquire“ ein Verb ist und kein Objekt dahinter steht, sodass ich nicht weiß, was „acquire“ ist. Nach meinem persönlichen Verständnis sollte die Bedeutung von „acquire“ darin bestehen, eine Qualifikation zum Ausführen der aktuellen Aktion basierend auf dem Statusfeldstatus zu erhalten.
Zum Beispiel ruft die lock()-Methode von ReentrantLock schließlich die Acquire-Methode auf, dann:
Thread 1 geht zu lock(), führt Acquire aus und findet state=0, also ist es Qualifiziert, die Aktion von lock() auszuführen, den Status auf 1 zu setzen, true zurückzugeben
Thread 2 geht zu lock(), führt Acquire aus und findet das state=1, also ist es nicht qualifiziert, die lock()-Aktion auszuführen, false zurückgeben
Ich denke, dieses Verständnis sollte genauer sein.
Exklusivmodus-Akquise-Implementierungsprozess
Auf der Grundlage der oben genannten Grundlagen werfen wir einen Blick auf den Implementierungsprozess der exklusiven Erfassung. Dabei geht es vor allem darum, wie eine Datenstruktur erstellt wird, nachdem die Thread-Erfassung fehlgeschlagen ist. Schauen wir uns dann zunächst die Theorie an und verwenden dann ein Beispiel zur Veranschaulichung Es.
Sehen Sie sich den Implementierungsprozess der Erfassungsmethode von AbstractQuueuedSynchronizer an. Die Erfassungsmethode wird für den Betrieb im exklusiven Modus verwendet:
1 public final void acquire(int arg) { 2 if (!tryAcquire(arg) && 3 acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) 4 selfInterrupt(); 5 }Wie bereits erwähnt, ist die tryAcquire-Methode eine von Unterklassen implementierte Methode Wenn tryAcquire true (Erfolg) zurückgibt, bedeutet dies, dass der aktuelle Thread die Qualifikation zum Ausführen der aktuellen Aktion erhalten hat Natürlich ist es nicht erforderlich, eine Datenstruktur zum Blockieren des Wartens aufzubauen.
Wenn die tryAcquire-Methode „false“ zurückgibt, ist der aktuelle Thread nicht für die Ausführung der aktuellen Aktion qualifiziert und führt dann „acquireQueued(addWaiter(Node.EXCLUSIVE), arg)“ aus. )"Dieser Code, dieser Satz ist offensichtlich, er besteht aus zwei Schritten:
addWaiter, füge einen Kellner hinzu
acquireQueued, versuchen Sie, eine Erwerbsaktion aus der Warteschlange zu erhalten und auszuführen
Sehen Sie sich jeden Schritt einzeln an. Was.
addWaiter
Schauen wir uns zunächst den ersten Schritt an. Was macht addWaiter? Wir wissen, dass dies der exklusive Modus des eingegebenen Parameters Node.EXCLUSIVE ist:
1 private Node addWaiter(Node mode) { 2 Node node = new Node(Thread.currentThread(), mode); 3 // Try the fast path of enq; backup to full enq on failure 4 Node prev = tail; 5 if (prev != null) { 6 node.prev = prev; 7 if (compareAndSetTail(prev, node)) { 8 prev.next = node; 9 return node;10 }11 }12 enq(node);13 return node;14 }Schauen Sie sich zunächst den Code in den Zeilen 4 bis 11 an, um die aktuelle Datenstruktur zu erhalten Schwanzknoten: Wenn es einen Schwanzknoten gibt, rufen Sie zuerst diesen Knoten ab und betrachten Sie ihn als Vorgängerknoten prev. Dann:
Der Vorgängerknoten des neu generierten Knotens zeigt auf prev
-
Unter Parallelität kann nur ein Thread seinen Knoten durch den CAS-Algorithmus zum Endknoten machen. Zu diesem Zeitpunkt zeigt der nächste dieser Threads auf den Knoten, der dem Thread entspricht
DeshalbWenn Knoten in der Datenstruktur vorhanden sind, werden alle neuen Knoten als Endknoten in die Datenstruktur eingefügt. Aus Kommentarsicht besteht der Zweck dieser Logik darin, die Warteschlange schnell mit dem O(1)-Effekt des kürzesten Pfades zu verbinden, um den Overhead zu minimieren.
Wenn der aktuelle Knoten nicht als Endknoten festgelegt ist, führen Sie die enq-Methode aus:
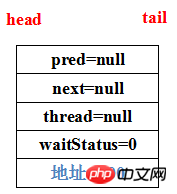
1 private Node enq(final Node node) { 2 for (;;) { 3 Node t = tail; 4 if (t == null) { // Must initialize 5 if (compareAndSetHead(new Node())) 6 tail = head; 7 } else { 8 node.prev = t; 9 if (compareAndSetTail(t, node)) {10 t.next = node;11 return t;12 }13 }14 }15 }Die Logik dieses Codes lautet:
Wenn der Endknoten leer ist, das heißt, es gibt keinen Knoten in der aktuellen Datenstruktur, dann Neuer Knoten ohne Status als Kopfknoten
Wenn der Endknoten nicht leer ist, verwenden Sie den CAS-Algorithmus, um den aktuellen Knoten als Endknoten anzuhängen unter Parallelität, da es sich um eine for(;;)-Schleife handelt, sodass alle Knoten, die nicht erfolgreich erfasst wurden, schließlich an die Datenstruktur angehängt werden
Siehe Verwenden Sie nach Abschluss des Codes ein Bild, um die gesamte Datenstruktur von AbstractQueuedSynchronizer darzustellen (es ist relativ einfach, ich werde es nicht selbst zeichnen, ich habe gerade ein Bild auf dem gefunden Internet):

acquireQueued
Die Warteschlange ist erstellt. Der nächste Schritt besteht darin, sie bei Bedarf aus der Warteschlange abzurufen. Nehmen Sie einen Knoten heraus. Wie der Name schon sagt, wird er aus der Warteschlange abgerufen. Schauen Sie sich die Implementierung der AcquireQueued-Methode an:
1 final boolean acquireQueued(final Node node, int arg) { 2 boolean failed = true; 3 try { 4 boolean interrupted = false; 5 for (;;) { 6 final Node p = node.prevecessor(); 7 if (p == head && tryAcquire(arg)) { 8 setHead(node); 9 p.next = null; // help GC10 failed = false;11 return interrupted;12 }13 if (shouldParkAfterFailedAcquire(p, node) &&14 parkAndCheckInterrupt())15 interrupted = true;16 }17 } finally {18 if (failed)19 cancelAcquire(node);20 }21 }这段代码描述了几件事:
从第6行的代码获取节点的前驱节点p,第7行的代码判断p是前驱节点并tryAcquire我们知道,只有当前第一个持有Thread的节点才会尝试acquire,如果节点acquire成功,那么setHead方法,将当前节点作为head、将当前节点中的thread设置为null、将当前节点的prev设置为null,这保证了数据结构中头结点永远是一个不带Thread的空节点
如果当前节点不是前驱节点或者tryAcquire失败,那么执行第13行~第15行的代码,做了两步操作,首先判断在acquie失败后是否应该park,其次park并检查中断状态
看一下第一步shouldParkAfterFailedAcquire代码做了什么:
1 private static boolean shouldParkAfterFailedAcquire(Node prev, Node node) { 2 int ws = prev.waitStatus; 3 if (ws == Node.SIGNAL) 4 /* 5 * This node has already set status asking a release 6 * to signal it, so it can safely park. 7 */ 8 return true; 9 if (ws > 0) {10 /*11 * prevecessor was cancelled. Skip over prevecessors and12 * indicate retry.13 */14 do {15 node.prev = prev = prev.prev;16 } while (prev.waitStatus > 0);17 prev.next = node;18 } else {19 /*20 * waitStatus must be 0 or PROPAGATE. Indicate that we21 * need a signal, but don't park yet. Caller will need to22 * retry to make sure it cannot acquire before parking.23 */24 compareAndSetWaitStatus(prev, ws, Node.SIGNAL);25 }26 return false;27 }这里每个节点判断它前驱节点的状态,如果:
它的前驱节点是SIGNAL状态的,返回true,表示当前节点应当park
它的前驱节点的waitStatus>0,相当于CANCELLED(因为状态值里面只有CANCELLED是大于0的),那么CANCELLED的节点作废,当前节点不断向前找并重新连接为双向队列,直到找到一个前驱节点waitStats不是CANCELLED的为止
它的前驱节点不是SIGNAL状态且waitStatus<=0,此时执行第24行代码,利用CAS机制,如果waitStatus的前驱节点是0那么更新为SIGNAL状态
如果判断判断应当park,那么parkAndCheckInterrupt方法:
LockSupport.park(
利用LockSupport的park方法让当前线程阻塞。
独占模式release流程
上面整理了独占模式的acquire流程,看到了等待的Node是如何构建成一个数据结构的,下面看一下释放的时候做了什么,release方法的实现为:
1 public final boolean release(int arg) {2 if (tryRelease(arg)) {3 Node h = head;4 if (h != null && h.waitStatus != 0)5 unparkSuccessor(h);6 return true;7 }8 return false;9 }tryRelease同样是子类去实现的,表示当前动作我执行完了,要释放我执行当前动作的资格,讲这个资格让给其它线程,然后tryRelease释放成功,获取到head节点,如果head节点的waitStatus不为0的话,执行unparkSuccessor方法,顾名思义unparkSuccessor意为unpark头结点的继承者,方法实现为:
1 private void unparkSuccessor(Node node) { 2 /* 3 * If status is negative (i.e., possibly needing signal) try 4 * to clear in anticipation of signalling. It is OK if this 5 * fails or if status is changed by waiting thread. 6 */ 7 int ws = node.waitStatus; 8 if (ws < 0) 9 compareAndSetWaitStatus(node, ws, 0);10 11 /*12 * Thread to unpark is held in successor, which is normally13 * just the next node. But if cancelled or apparently null,14 * traverse backwards from tail to find the actual15 * non-cancelled successor.16 */17 Node s = node.next;18 if (s == null || s.waitStatus > 0) {19 s = null;20 for (Node t = tail; t != null && t != node; t = t.prev)21 if (t.waitStatus <= 0)22 s = t;23 }24 if (s != null)25 LockSupport.unpark(s.thread);26 }这段代码比较好理解,整理一下流程:
头节点的waitStatus<0,将头节点的waitStatus设置为0
拿到头节点的下一个节点s,如果s==null或者s的waitStatus>0(被取消了),那么从队列尾巴开始向前寻找一个waitStatus<=0的节点作为后继要唤醒的节点
最后,如果拿到了一个不等于null的节点s,就利用LockSupport的unpark方法让它取消阻塞。
实战举例:数据结构构建
上面的例子讲解地过于理论,下面利用ReentrantLock举个例子,但是这里不讲ReentrantLock实现原理,只是利用ReentrantLock研究AbstractQueuedSynchronizer的acquire和release。示例代码为:
1 /** 2 * @author 五月的仓颉 3 */ 4 public class AbstractQueuedSynchronizerTest { 5 6 @Test 7 public void testAbstractQueuedSynchronizer() { 8 Lock lock = new ReentrantLock(); 9 10 Runnable runnable0 = new ReentrantLockThread(lock);11 Thread thread0 = new Thread(runnable0);12 thread0.setName("线程0");13 14 Runnable runnable1 = new ReentrantLockThread(lock);15 Thread thread1 = new Thread(runnable1);16 thread1.setName("线程1");17 18 Runnable runnable2 = new ReentrantLockThread(lock);19 Thread thread2 = new Thread(runnable2);20 thread2.setName("线程2");21 22 thread0.start();23 thread1.start();24 thread2.start();25 26 for (;;);27 }28 29 private class ReentrantLockThread implements Runnable {30 31 private Lock lock;32 33 public ReentrantLockThread(Lock lock) {34 this.lock = lock;35 }36 37 @Override38 public void run() {39 try {40 lock.lock();41 for (;;);42 } finally {43 lock.unlock();44 }45 }46 47 }48 49 }全部是死循环,相当于第一条线程(线程0)acquire成功之后,后两条线程(线程1、线程2)阻塞,下面的代码就不考虑后两条线程谁先谁后的问题,就一条线程(线程1)流程执行到底、另一条线程(线程2)流程执行到底这么分析了。
这里再把addWaiter和enq两个方法源码贴一下:
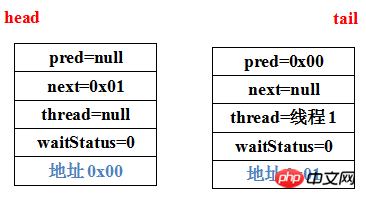
1 private Node addWaiter(Node mode) { 2 Node node = new Node(Thread.currentThread(), mode); 3 // Try the fast path of enq; backup to full enq on failure 4 Node prev = tail; 5 if (prev != null) { 6 node.prev = prev; 7 if (compareAndSetTail(prev, node)) { 8 prev.next = node; 9 return node;10 }11 }12 enq(node);13 return node;14 } 1 private Node enq(final Node node) { 2 for (;;) { 3 Node t = tail; 4 if (t == null) { // Must initialize 5 if (compareAndSetHead(new Node())) 6 tail = head; 7 } else { 8 node.prev = t; 9 if (compareAndSetTail(t, node)) {10 t.next = node;11 return t;12 }13 }14 }15 }首先第一个acquire失败的线程1,由于此时整个数据结构中么没有任何数据,因此addWaiter方法第4行中拿到的prev=tail为空,执行enq方法,首先第3行获取tail,第4行判断到tail是null,因此头结点new一个Node出来通过CAS算法设置为数据结构的head,tail同样也是这个Node,此时数据结构为:
为了方便描述,prev和next,我给每个Node随便加了一个地址。接着继续enq,因为enq内是一个死循环,所以继续第3行获取tail,new了一个空的Node之后tail就有了,执行else判断,通过第8行~第10行代码将当前线程对应的Node追加到数据结构尾部,那么当前构建的数据结构为:
这样,线程1对应的Node被加入数据结构,成为数据结构的tail,而数据结构的head是一个什么都没有的空Node。
接着线程2也acquire失败了,线程2既然acquire失败,那也要准备被加入数据结构中,继续先执行addWaiter方法,由于此时已经有了tail,因此不需要执行enq方法,可以直接将当前Node添加到数据结构尾部,那么当前构建的数据结构为:
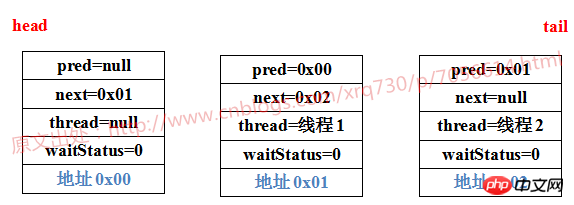
至此,两个阻塞的线程构建的三个Node已经全部归位。
实战举例:线程阻塞
上述流程只是描述了构建数据结构的过程,并没有描述线程1、线程2阻塞的流程,因此接着继续用实际例子看一下线程1、线程2如何阻塞。贴一下acquireQueued、shouldParkAfterFailedAcquire两个方法源码:
1 final boolean acquireQueued(final Node node, int arg) { 2 boolean failed = true; 3 try { 4 boolean interrupted = false; 5 for (;;) { 6 final Node p = node.prevecessor(); 7 if (p == head && tryAcquire(arg)) { 8 setHead(node); 9 p.next = null; // help GC10 failed = false;11 return interrupted;12 }13 if (shouldParkAfterFailedAcquire(p, node) &&14 parkAndCheckInterrupt())15 interrupted = true;16 }17 } finally {18 if (failed)19 cancelAcquire(node);20 }21 } 1 private static boolean shouldParkAfterFailedAcquire(Node prev, Node node) { 2 int ws = prev.waitStatus; 3 if (ws == Node.SIGNAL) 4 /* 5 * This node has already set status asking a release 6 * to signal it, so it can safely park. 7 */ 8 return true; 9 if (ws > 0) {10 /*11 * prevecessor was cancelled. Skip over prevecessors and12 * indicate retry.13 */14 do {15 node.prev = prev = prev.prev;16 } while (prev.waitStatus > 0);17 prev.next = node;18 } else {19 /*20 * waitStatus must be 0 or PROPAGATE. Indicate that we21 * need a signal, but don't park yet. Caller will need to22 * retry to make sure it cannot acquire before parking.23 */24 compareAndSetWaitStatus(prev, ws, Node.SIGNAL);25 }26 return false;27 }<p><span style="font-size: 13px; font-family: 宋体">首先是线程1,它的前驱节点是head节点,在它tryAcquire成功的情况下,执行第8行~第11行的代码。做几件事情:</span></p>
<ol class=" list-paddingleft-2">
<li><p><span style="font-size: 13px; font-family: 宋体">head为线程1对应的Node</span></p></li>
<li><p><span style="font-size: 13px; font-family: 宋体">线程1对应的Node的thread置空</span></p></li>
<li><p><span style="font-size: 13px; font-family: 宋体">线程1对应的Node的prev置空</span></p></li>
<li><p><span style="font-size: 13px; font-family: 宋体">原head的next置空,这样原head中的prev、next、thread都为空,对象内没有引用指向其他地方,GC可以认为这个Node是垃圾,对这个Node进行回收,注释"Help GC"就是这个意思</span></p></li>
<li><p><span style="font-size: 13px; font-family: 宋体">failed=false表示没有失败</span></p></li>
</ol>
<p><span style="font-size: 13px; font-family: 宋体">因此,如果线程1执行tryAcquire成功,那么数据结构将变为:</span></p>
<p><span style="font-size: 13px; font-family: 宋体"><img src="https://img.php.cn/upload/article/000/000/001/3d801230fc075de2d75122d27258c2ad-7.png" alt=""></span></p>
<p><span style="font-size: 13px; font-family: 宋体">从上述流程可以总结到:<span style="color: #ff0000"><strong>只有前驱节点为head的节点会尝试tryAcquire,其余都不会,结合后面的release选继承者的方式,保证了先acquire失败的线程会优先从阻塞状态中解除去重新acquire</strong></span>。这是一种公平的acquire方式,因为它遵循"先到先得"原则,但是我们可以动动手脚让这种公平变为非公平,比如ReentrantLock默认的费公平模式,这个留在后面说。</span></p>
<p><span style="font-size: 13px; font-family: 宋体">那如果线程1执行tryAcquire失败,那么要执行shouldParkAfterFailedAcquire方法了,shouldParkAfterFailedAcquire拿线程1的前驱节点也就是head节点的waitStatus做了一个判断,因为waitStatus=0,因此执行第18行~第20行的逻辑,将head的waitStatus设置为SIGNAL即-1,然后方法返回false,数据结构变为:</span></p>
<p><span style="font-size: 13px; font-family: 宋体"><img src="https://img.php.cn/upload/article/000/000/001/3d801230fc075de2d75122d27258c2ad-8.png" alt=""></span></p>
<p><span style="font-size: 13px; font-family: 宋体">看到这里就一个变化:head的waitStatus从0变成了-1。既然shouldParkAfterFailedAcquire返回false,acquireQueued的第13行~第14行的判断自然不通过,继续走for(;;)循环,如果tryAcquire失败显然又来到了shouldParkAfterFailedAcquire方法,此时线程1对应的Node的前驱节点head节点的waitStatus已经变为了SIGNAL即-1,因此执行第4行~第8行的代码,直接返回true出去。</span></p>
<p><span style="font-size: 13px; font-family: 宋体">shouldParkAfterFailedAcquire返回true,parkAndCheckInterrupt直接调用LockSupport的park方法:</span></p>
<div class="cnblogs_code"><pre class="brush:php;toolbar:false"> 1 private final boolean parkAndCheckInterrupt() { 2 LockSupport.park(this); 3 return Thread.interrupted(); 4 }至此线程1阻塞,线程2阻塞的流程与线程1阻塞的流程相同,可以自己分析一下。
另外再提一个问题,不知道大家会不会想:
为什么线程1对应的Node构建完毕不直接调用LockSupport的park方法进行阻塞?
为什么不直接把head的waitStatus直接设置为Signal而要从0设置为Signal?
我认为这是AbstractQueuedSynchronizer开发人员做了类似自旋的操作。因为很多时候获取acquire进行操作的时间很短,阻塞会引起上下文的切换,而很短时间就从阻塞状态解除,这样相对会比较耗费性能。
因此我们看到线程1自构建完毕Node加入数据结构到阻塞,一共尝试了两次tryAcquire,如果其中有一次成功,那么线程1就没有必要被阻塞,提升了性能。
Das obige ist der detaillierte Inhalt vonAnalyse von AbstractQueuedSynchronizer: Wichtige und schwierige Punkte im exklusiven Modus. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Warum kann ich keine Bilder in mein exportiertes JAR aus Eclipse laden?
- Java-Sammlung zum Auflisten
- Können wir in Java generische Arrays erstellen, die vergleichbar sind?
- Wie fügt man im Frühjahr mithilfe von AutowireCapableBeanFactory Abhängigkeiten in selbstinstanziierte Objekte ein?
- Warum erhalte ich eine UnsupportedOperationException, wenn ich List.add() verwende?